【无人机控制】倾转旋翼 四旋翼无人机轨迹跟踪的 LMPC(线性模型预测控制)附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
🔥 内容介绍
一、背景
(一)倾转旋翼四旋翼无人机的特点与应用
倾转旋翼四旋翼无人机结合了直升机垂直起降和固定翼飞机高速巡航的优势,在多种领域具有广泛应用前景。例如在物流配送中,它能够垂直起飞,在城市环境中灵活穿梭,到达开阔区域后转换为固定翼模式快速飞行,提高配送效率;在应急救援场景里,可利用其垂直起降能力迅速抵达受灾现场,再通过高速巡航功能快速搜索大面积区域。然而,这种独特的飞行模式转换也给无人机的轨迹跟踪控制带来了挑战。
(二)传统控制方法的局限性
传统的无人机控制方法,如比例 - 积分 - 微分(PID)控制,虽然原理简单且在一些情况下能够实现基本的控制目标,但对于倾转旋翼四旋翼无人机这种具有复杂动力学特性和模式转换的系统,存在一定局限性。PID 控制通常基于线性定常模型设计,难以适应无人机在不同飞行模式下动力学模型的显著变化。而且,当面对复杂环境干扰和高精度轨迹跟踪要求时,PID 控制的性能会受到影响,无法实时优化控制输入以满足动态变化的需求。
(三)线性模型预测控制(LMPC)的优势
线性模型预测控制(LMPC)是一种先进的控制策略,适用于处理具有多变量、强耦合和约束条件的复杂系统。对于倾转旋翼四旋翼无人机的轨迹跟踪控制,LMPC 具有以下优势:它能够基于系统的线性模型对未来的输出进行预测,提前考虑系统的动态变化;通过滚动优化机制,实时调整控制输入,使系统能够更好地跟踪期望轨迹;并且可以方便地将各种约束条件(如控制输入的幅值限制、无人机的物理性能限制等)纳入优化过程,确保无人机在安全、可行的范围内运行。
二、原理
(一)倾转旋翼四旋翼无人机动力学模型
-
飞行模式与动力学特性:倾转旋翼四旋翼无人机具有两种主要飞行模式:四旋翼模式和倾转旋翼(类似固定翼)模式。在四旋翼模式下,无人机通过四个旋翼产生的升力实现垂直起降、悬停和小范围机动,其动力学主要涉及垂直方向的升降、水平方向的平移以及绕机体轴的旋转。而在倾转旋翼模式下,旋翼倾转,部分升力转化为向前的推力,使无人机能够像固定翼飞机一样高速巡航,此时动力学特性包括纵向的加速、减速和俯仰运动,以及横向的侧滑和滚转运动。
-
-
-
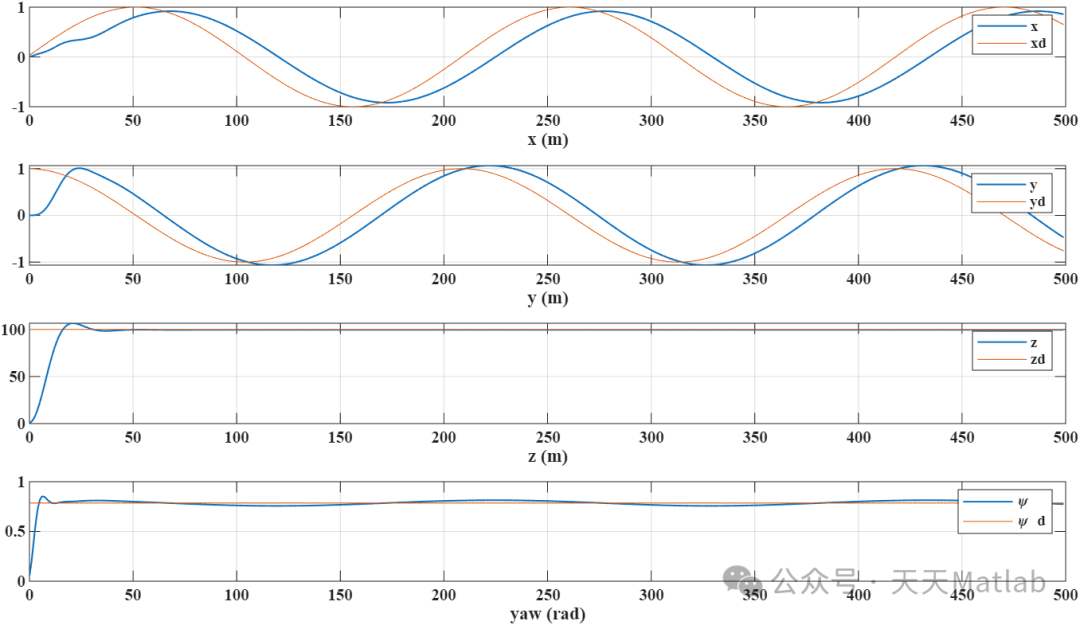
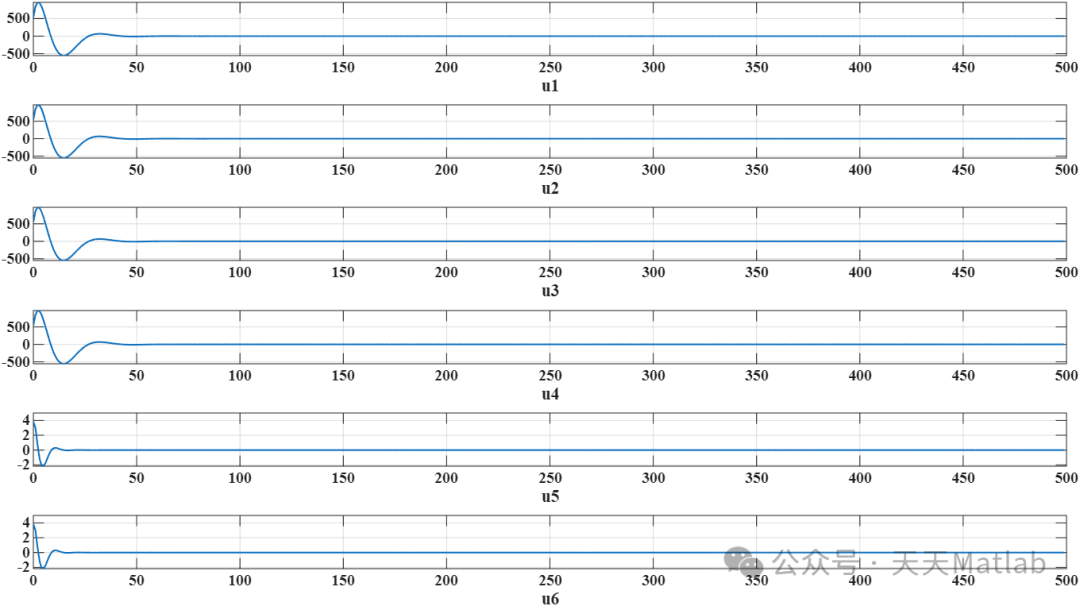
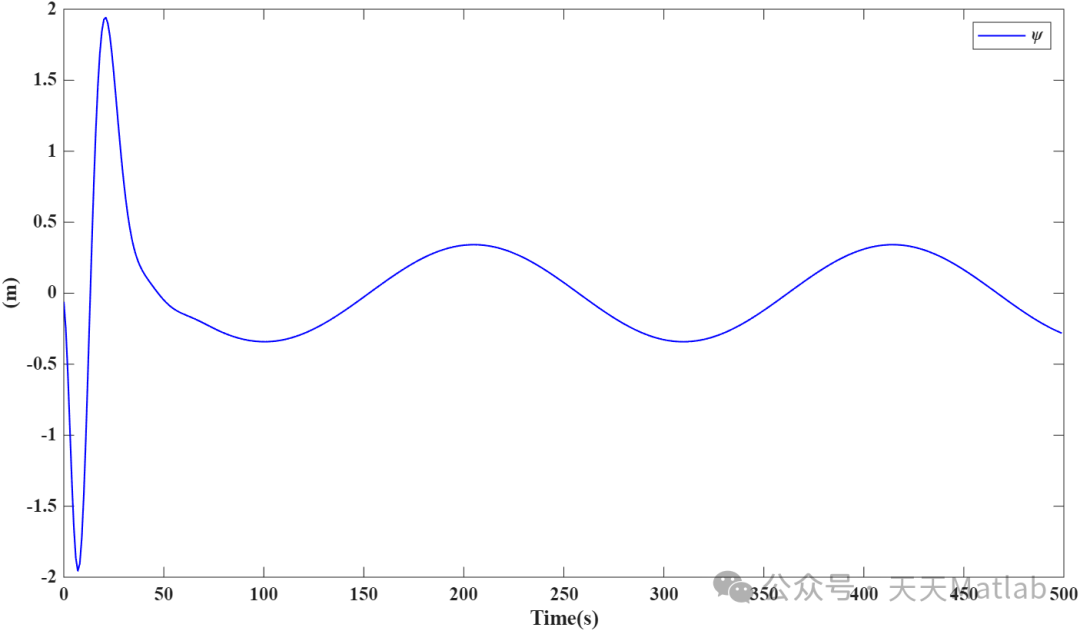
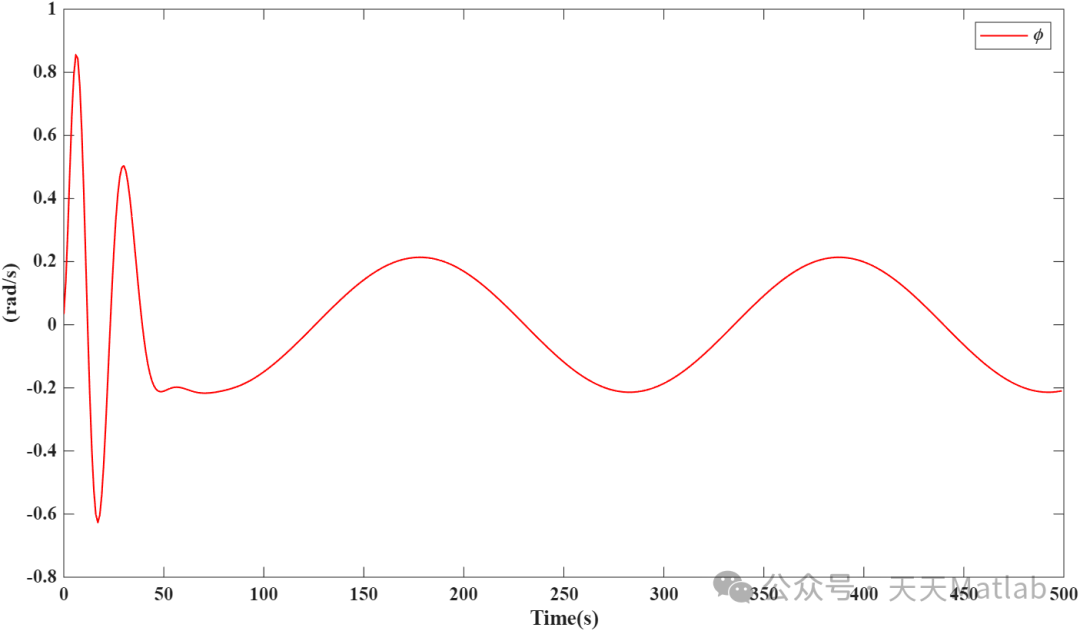
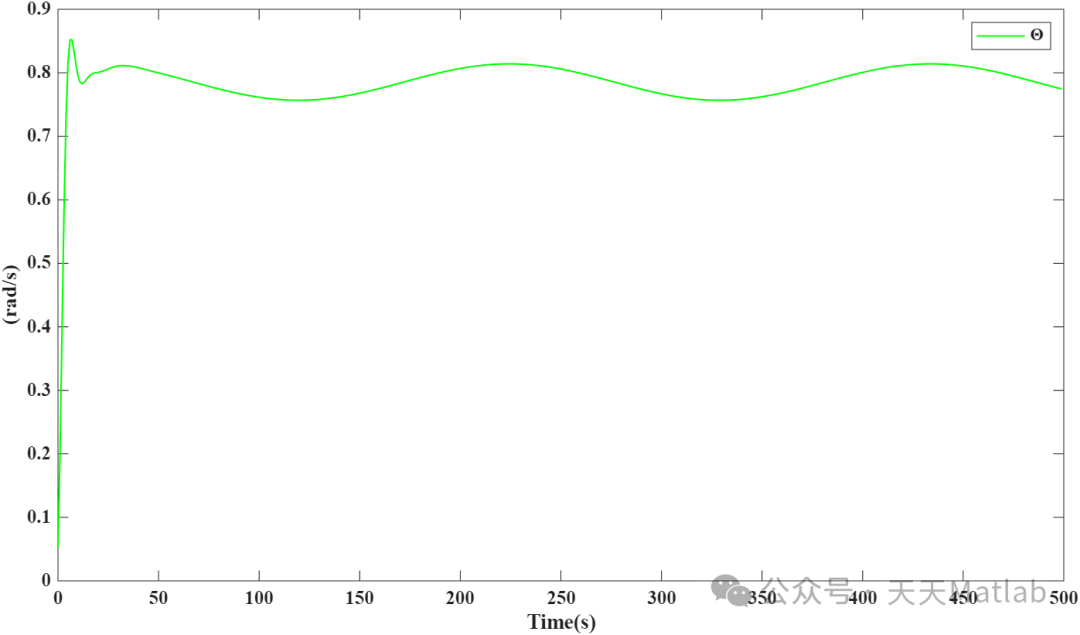
⛳️ 运行结果
📣 部分代码
function [A_lin, B_lin] = linearize_SRB()
% Linearize the custom Euler-angle tilt rotor dynamics
% Symbolic state and input
x = sym('x', [12, 1]); % 12 states
u = sym('u', [6, 1]); % 6 control inputs
t = 0;
% Get system parameters
params = get_params();
% Define symbolic dynamics
f = dynamics_SRB(t, x, u, params);
% Linearize around hover condition
x0 = zeros(12, 1); % zero state
u0 = zeros(6, 1); % zero control input: F1-F4=0, alpha1/2=0
% Jacobians
A_lin = double(subs(jacobian(f, x), [x; u], [x0; u0]));
B_lin = double(subs(jacobian(f, u), [x; u], [x0; u0]));
end
🔗 参考文献
🍅往期回顾扫扫下方二维码

天天Matlab推荐搜索
完整代码程序定制

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献53条内容
已为社区贡献53条内容

所有评论(0)