基于模糊滑模控制器Fuzzy - SMC的永磁同步电机FOC探索
基于模糊滑模控制器Fuzzy-SMC的永磁同步电机FOC 1.转速环采用Fuzzy-SMC控制器; 2.控制器参数使用PSO算法进行在线寻优,降低调参难度; 3.提供算法对应的参考文献和仿真模型
在永磁同步电机(PMSM)的控制领域,基于磁场定向控制(FOC)策略搭配模糊滑模控制器(Fuzzy - SMC)能实现更优异的性能。今天就和大家唠唠这里面的门道。
转速环的Fuzzy - SMC控制器
转速环在PMSM控制中起着关键作用,采用Fuzzy - SMC控制器能有效提升系统的鲁棒性和动态性能。滑模控制(SMC)以其对系统参数变化和外部干扰不敏感的特性而闻名,但传统滑模控制存在抖振问题。这时模糊控制(Fuzzy)就派上用场了,它能根据系统状态自适应调整滑模控制器的控制律,从而减轻抖振。
基于模糊滑模控制器Fuzzy-SMC的永磁同步电机FOC 1.转速环采用Fuzzy-SMC控制器; 2.控制器参数使用PSO算法进行在线寻优,降低调参难度; 3.提供算法对应的参考文献和仿真模型
下面来看一段简单的Python代码示例(这里仅为原理示意,实际应用需结合具体电机模型和硬件平台):
import numpy as np
# 定义模糊隶属度函数
def triangular_mf(x, a, b, c):
return np.maximum(0, np.minimum((x - a) / (b - a), (c - x) / (c - b)))
# 模糊推理规则示例
def fuzzy_inference(error, error_dot):
# 假设误差和误差变化率分为负大、负小、零、正小、正大五个模糊集
NB_error = triangular_mf(error, -6, -4, -2)
NS_error = triangular_mf(error, -4, -2, 0)
Z_error = triangular_mf(error, -2, 0, 2)
PS_error = triangular_mf(error, 0, 2, 4)
PB_error = triangular_mf(error, 2, 4, 6)
NB_error_dot = triangular_mf(error_dot, -0.6, -0.4, -0.2)
NS_error_dot = triangular_mf(error_dot, -0.4, -0.2, 0)
Z_error_dot = triangular_mf(error_dot, -0.2, 0, 0.2)
PS_error_dot = triangular_mf(error_dot, 0, 0.2, 0.4)
PB_error_dot = triangular_mf(error_dot, 0.2, 0.4, 0.6)
# 简单的模糊规则,例如误差正大且误差变化率正大,输出控制量正大
output = PB_error * PB_error_dot * 6 + PB_error * PS_error_dot * 4 + \
PS_error * PB_error_dot * 4 + PS_error * PS_error_dot * 2 + \
Z_error * Z_error_dot * 0 + NS_error * NS_error_dot * (-2) + \
NB_error * NB_error_dot * (-6) + NB_error * NS_error_dot * (-4) + \
NS_error * NB_error_dot * (-4)
return output代码分析:首先定义了三角形隶属度函数triangularmf,用于描述模糊集的隶属度。然后在fuzzyinference函数中,将输入的误差和误差变化率分别映射到不同的模糊集,并依据简单的模糊推理规则得出输出控制量。实际应用中,模糊规则和隶属度函数需根据电机特性仔细调整。
PSO算法在线寻优控制器参数
虽然Fuzzy - SMC控制器性能不错,但手动调参难度较大。粒子群优化(PSO)算法就能解决这个难题,它通过模拟鸟群觅食行为,在参数空间中寻找最优解。
以下是一个简单的PSO算法Python代码框架:
import numpy as np
def fitness_function(params):
# 这里需根据实际Fuzzy - SMC控制器参数与电机性能指标定义适应度函数
# 例如可以是转速跟踪误差的平方和
error_sum_square = 0
# 假设这里有个模拟电机运行的函数simulate_motor运行并返回误差
error = simulate_motor(params)
error_sum_square += error ** 2
return error_sum_square
def pso(num_particles, num_iterations, w, c1, c2, bounds):
dim = len(bounds[0])
positions = np.random.uniform(bounds[0], bounds[1], (num_particles, dim))
velocities = np.zeros((num_particles, dim))
pbest_positions = positions.copy()
pbest_fitness = np.array([fitness_function(p) for p in positions])
gbest_index = np.argmin(pbest_fitness)
gbest_position = pbest_positions[gbest_index]
gbest_fitness = pbest_fitness[gbest_index]
for i in range(num_iterations):
r1 = np.random.rand(num_particles, dim)
r2 = np.random.rand(num_particles, dim)
velocities = w * velocities + c1 * r1 * (pbest_positions - positions) + c2 * r2 * (
gbest_position - positions)
positions = positions + velocities
positions = np.clip(positions, bounds[0], bounds[1])
fitness_values = np.array([fitness_function(p) for p in positions])
improved_indices = fitness_values < pbest_fitness
pbest_positions[improved_indices] = positions[improved_indices]
pbest_fitness[improved_indices] = fitness_values[improved_indices]
current_best_index = np.argmin(pbest_fitness)
if pbest_fitness[current_best_index] < gbest_fitness:
gbest_position = pbest_positions[current_best_index]
gbest_fitness = pbest_fitness[current_best_index]
return gbest_position代码分析:fitness_function是适应度函数,需根据实际的Fuzzy - SMC控制器参数和电机性能指标来定义,这里简单假设为转速跟踪误差的平方和。pso函数实现了PSO算法的基本流程,包括粒子位置和速度的初始化,迭代更新粒子位置和速度,并不断更新个体最优和全局最优位置。
参考文献与仿真模型
- 参考文献:
- 《永磁同步电机滑模变结构控制技术》,这本书深入讲解了滑模控制在永磁同步电机中的应用原理与实现细节。
- “Fuzzy - Sliding - Mode Control for Permanent - Magnet Synchronous Motor Drives with Improved Disturbance Rejection”,这篇论文详细阐述了模糊滑模控制在PMSM驱动系统中的应用及对干扰抑制的改进。
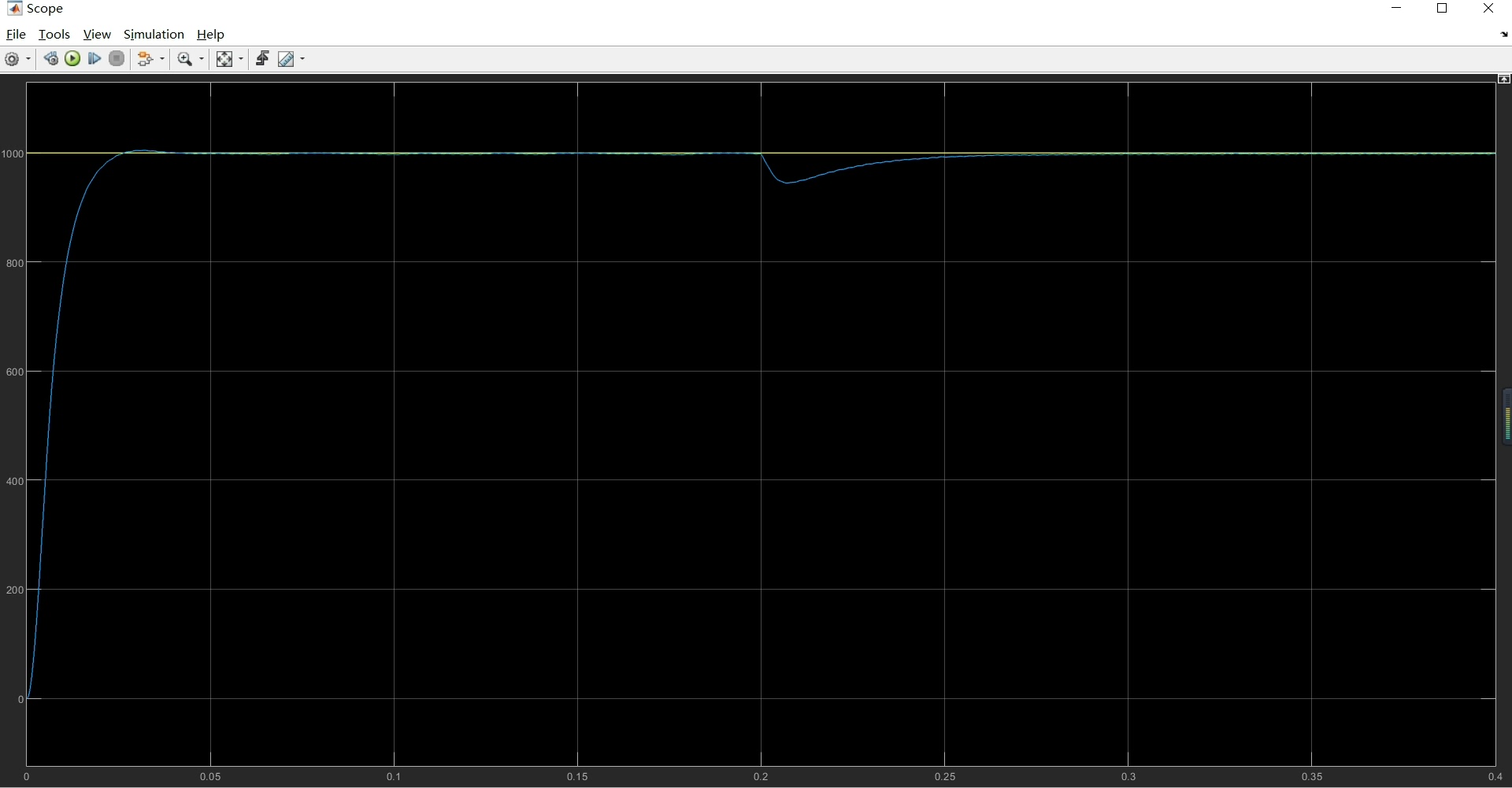
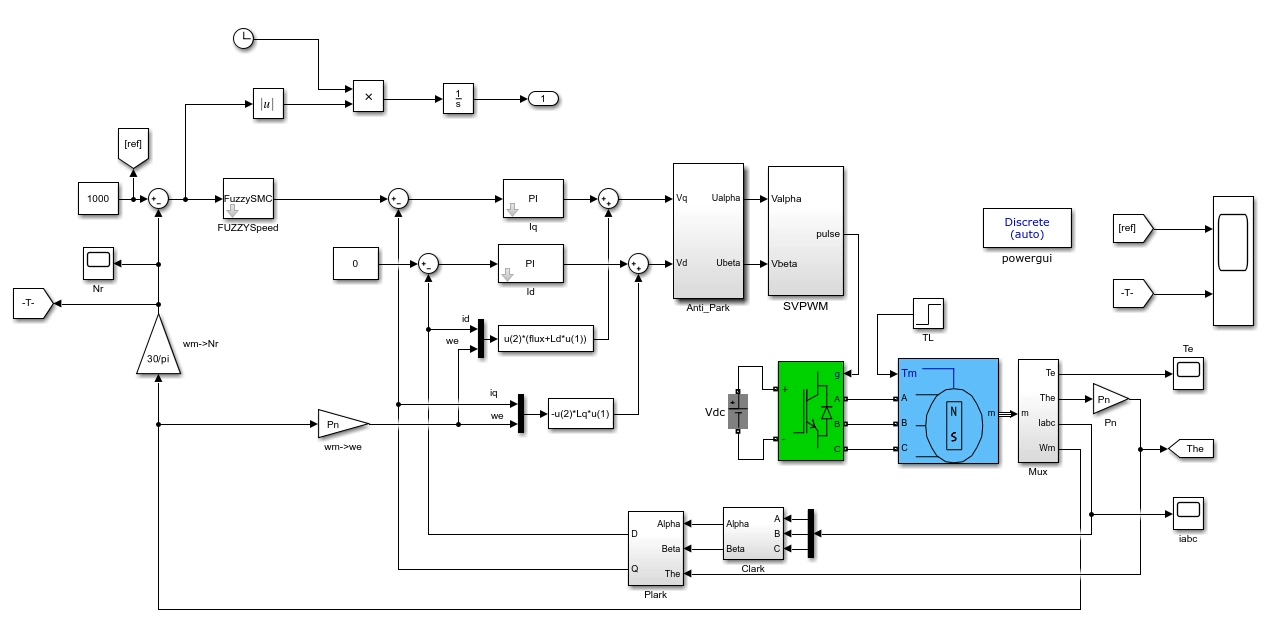
- 仿真模型:可以使用MATLAB/Simulink搭建仿真模型。在Simulink中,利用电机模块库构建永磁同步电机模型,转速环使用自定义的Fuzzy - SMC控制器模块(可通过S - Function实现上述模糊滑模控制算法),并嵌入PSO算法模块用于在线调整控制器参数。通过设置不同的工况和负载条件,验证控制策略的有效性。
通过以上基于模糊滑模控制器Fuzzy - SMC的永磁同步电机FOC方案,结合PSO算法在线寻优,有望为永磁同步电机控制带来更高效、稳定的解决方案。希望本文能给各位在该领域探索的小伙伴一些启发。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献26条内容
已为社区贡献26条内容

所有评论(0)