永磁同步电机FOC仿真中龙伯格观测器的妙用
永磁同步电机磁场定向控制FOC matlab simulink仿真模型可以加龙伯格观测器等滤波算法
在永磁同步电机(PMSM)的控制领域,磁场定向控制(FOC)是一种极为常用且高效的控制策略。它通过将电机的电流分解为励磁电流和转矩电流,实现对电机磁场和转矩的独立控制,从而达到良好的调速性能。而在实际应用中,由于测量噪声等因素的干扰,电机的电流、速度等反馈信号往往含有误差,这时候加入滤波算法就显得尤为重要。今天咱就唠唠在PMSM的FOC Matlab Simulink仿真模型里,如何融入龙伯格观测器这种滤波算法。
FOC控制基础回顾
先简单回顾下FOC的原理。FOC控制的核心是将三相静止坐标系下的电流通过Clark和Park变换,转换到同步旋转坐标系(d - q轴)下。假设三相静止坐标系下的电流为$ia$,$ib$,$ic$,经过Clark变换后得到两相静止坐标系下的电流$i{\alpha}$和$i_{\beta}$,其变换公式如下:
\[
\begin{bmatrix}
i_{\alpha} \\
i_{\beta}
\end{bmatrix}
=
\frac{2}{3}
\begin{bmatrix}
1 & -\frac{1}{2} & -\frac{1}{2} \\
0 & \frac{\sqrt{3}}{2} & -\frac{\sqrt{3}}{2}
\end{bmatrix}
\begin{bmatrix}
i_a \\
i_b \\
i_c
\end{bmatrix}
\]
再经过Park变换,将$i{\alpha}$和$i{\beta}$转换到同步旋转坐标系下的$id$和$iq$,变换公式为:
\[
\begin{bmatrix}
i_d \\
i_q
\end{bmatrix}
永磁同步电机磁场定向控制FOC matlab simulink仿真模型可以加龙伯格观测器等滤波算法
=
\begin{bmatrix}
\cos\theta & \sin\theta \\
-\sin\theta & \cos\theta
\end{bmatrix}
\begin{bmatrix}
i_{\alpha} \\
i_{\beta}
\end{bmatrix}
\]
这里$\theta$是转子位置角。在Simulink中搭建FOC模型时,我们可以使用“Math Operations”模块来实现这些变换。例如,Clark变换可以通过矩阵乘法模块实现:
% Clark变换矩阵
Clark_matrix = [2/3, -1/3, -1/3; 0, sqrt(3)/3, -sqrt(3)/3];
% 假设ia, ib, ic是输入的三相电流信号
ia = 1; ib = 0; ic = -1;
input_current = [ia; ib; ic];
alpha_beta_current = Clark_matrix * input_current; 这段代码里,先定义了Clark变换矩阵,然后给定了三相电流的示例值,最后通过矩阵乘法得到两相静止坐标系下的电流。
龙伯格观测器登场
龙伯格观测器能够对系统的状态进行估计,通过反馈校正机制,可以在一定程度上抑制噪声的影响。对于PMSM系统,我们可以利用龙伯格观测器来估计电机的转速、位置等状态变量。
以估计转子位置为例,假设电机的状态方程可以表示为:
\[
\dot{x} = Ax + Bu
\]
\[
y = Cx
\]
这里$x$是状态变量(包含转子位置、速度等),$u$是输入(如电压),$y$是输出(如电流)。龙伯格观测器的方程为:
\[
\hat{\dot{x}} = A\hat{x} + Bu + L(y - C\hat{x})
\]
其中$\hat{x}$是状态变量的估计值,$L$是观测器增益矩阵。在Simulink里搭建龙伯格观测器时,我们需要先确定系统矩阵$A$、$B$、$C$,然后通过调整观测器增益矩阵$L$来优化观测效果。
% 假设已经确定系统矩阵A, B, C
A = [0, 1; -1, 0];
B = [0; 1];
C = [1, 0];
% 观测器增益矩阵L
L = [10; 10];
% 初始状态估计值
x_hat = [0; 0];
% 假设输入u和输出y
u = 1;
y = 0.5;
% 龙伯格观测器更新
x_hat_dot = A * x_hat + B * u + L * (y - C * x_hat);
x_hat = x_hat + x_hat_dot * 0.01; % 假设步长为0.01这段代码里,先设定了系统矩阵和观测器增益矩阵,然后给定了输入输出和初始状态估计值,最后通过迭代更新状态估计值。
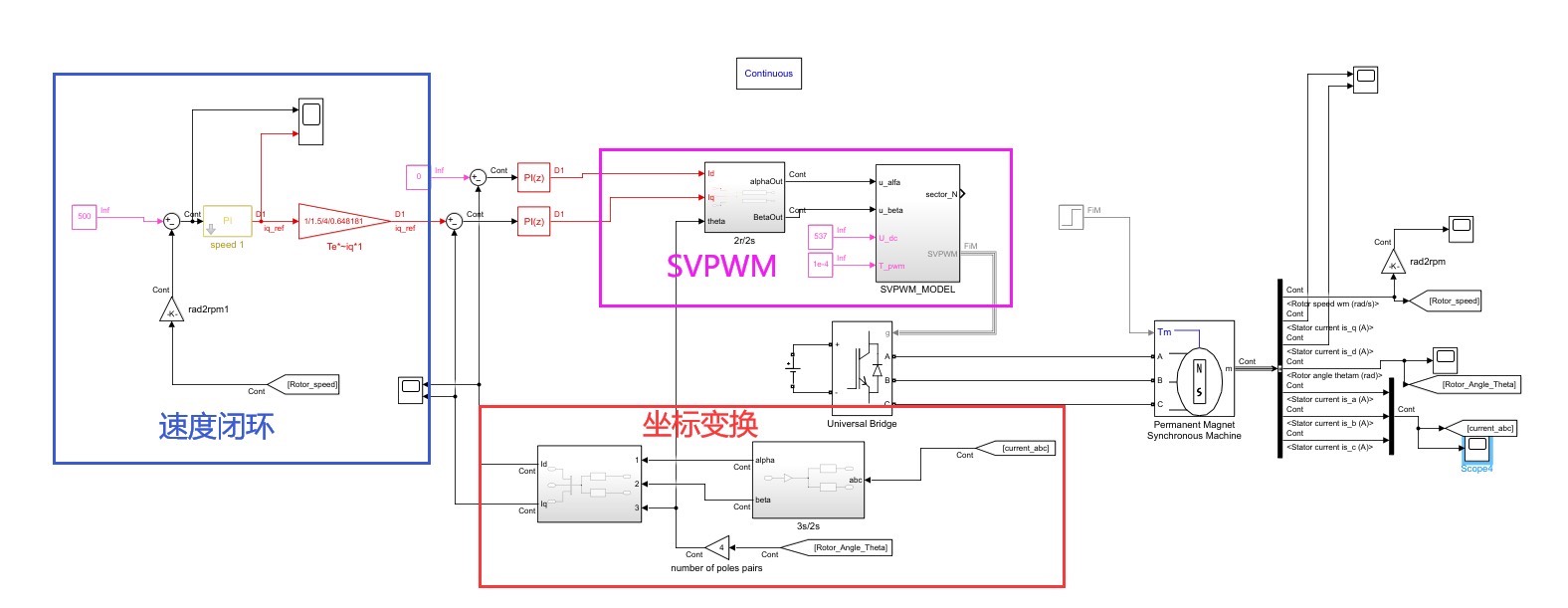
在FOC仿真模型中整合龙伯格观测器
回到Simulink的FOC仿真模型,我们将龙伯格观测器估计出的转子位置和速度反馈到FOC的控制环节中。在Park变换模块前,原本我们是使用实际测量的转子位置,现在替换为龙伯格观测器估计出的转子位置。这样,即使实际测量值受到噪声干扰,龙伯格观测器估计出的相对平滑的位置信号,能让FOC控制更加稳定。
比如说,在搭建好的FOC模型中,找到Park变换模块的转子位置输入端口,将其连接到龙伯格观测器输出的估计转子位置端口。同时,在速度环PI控制器的反馈端,也可以使用龙伯格观测器估计出的速度值。
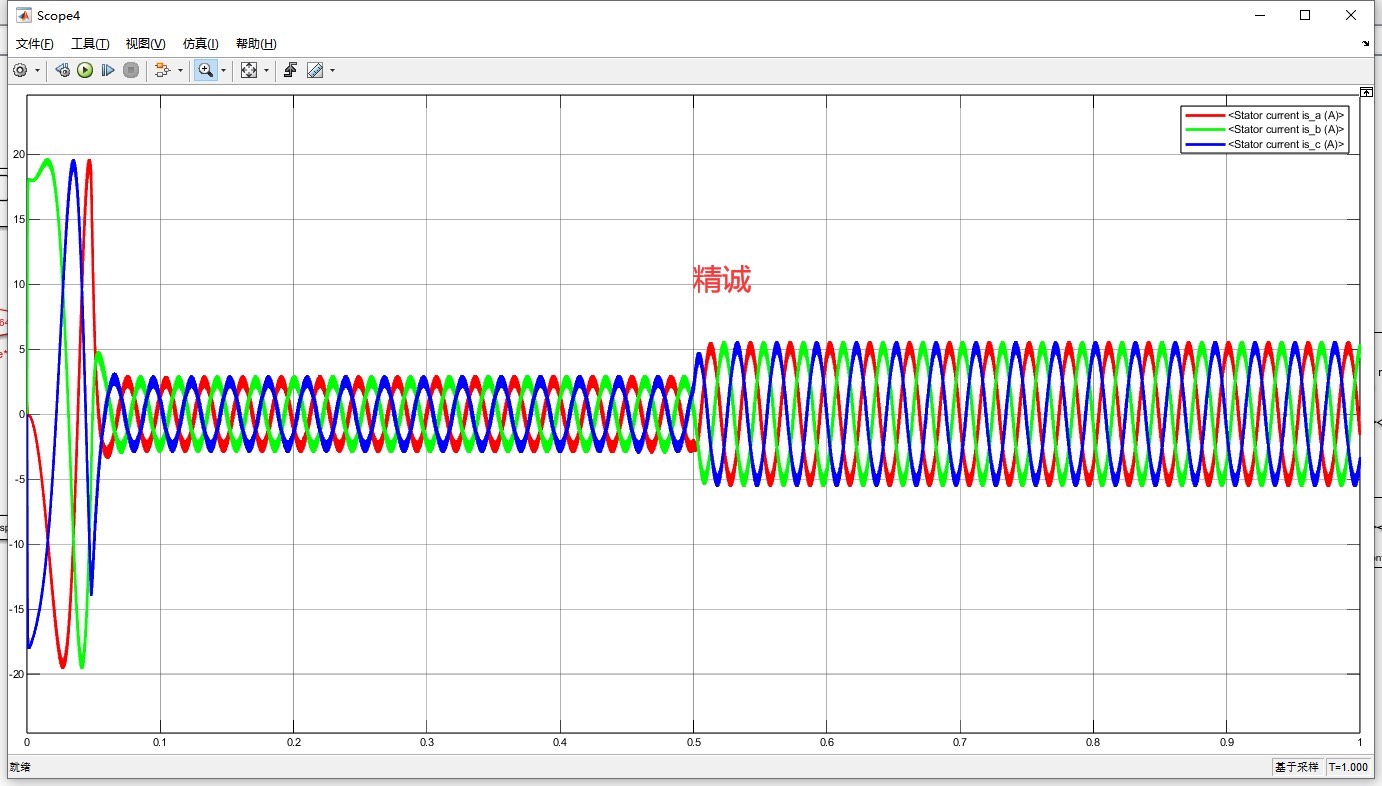
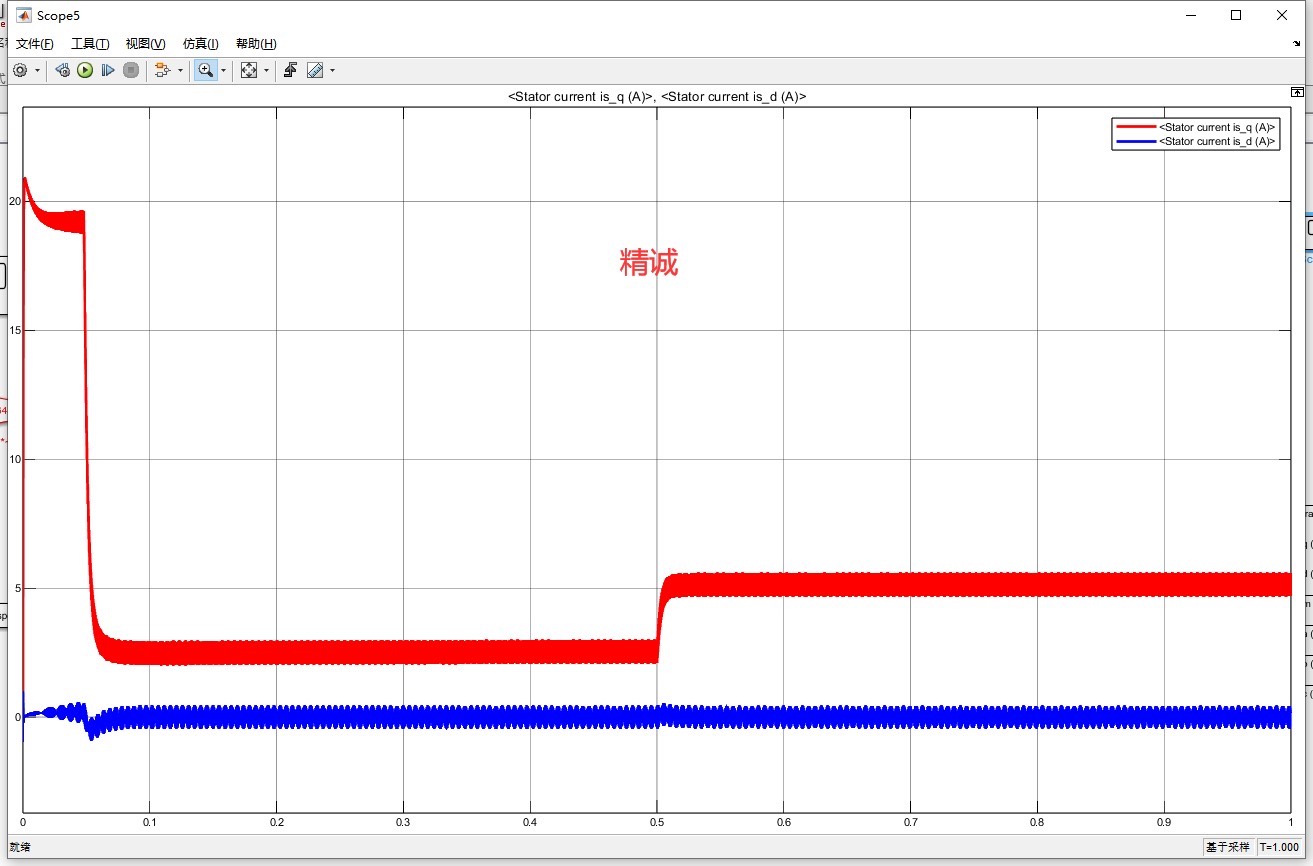
通过这样的整合,在面对复杂的实际工况时,永磁同步电机的FOC控制能展现出更好的抗干扰能力和控制性能。无论是电机启动时的冲击,还是运行过程中的负载突变,带有龙伯格观测器的FOC仿真模型都能给出更稳定、更准确的响应。感兴趣的小伙伴不妨自己动手在Matlab Simulink里搭建试试,看看这种组合带来的神奇效果。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 9
9 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)