双容水箱液位控制系统设计与仿真:探索复杂控制的奇妙之旅
双容水箱液位控制系统设计与仿真 实验软件:Matalb R2022a 包含完整项目报告、完整实验程序、实验结果配图 项目介绍: 本项目针对双容水箱液位控制系统存在状态时变、非线性和滞后性等诸多不确定性因素的问题,首先通过对双容水箱的分析,先后建立传递函数及状态空间方程两种模型,之后设计了常规PID控制器、SMITH预估控制器、模糊PID串级控制器、滑模变结构控制器这四种控制器,并将这四种控制器分别应用于本项目所构建的双容水箱液位控制系统中,对其分别进行SIMULINK仿真分析。
最近在搞双容水箱液位控制系统的设计与仿真,用的是Matlab R2022a,跟大家分享下这个超有趣的项目。
项目背景及挑战
双容水箱液位控制系统可不是省油的灯,存在状态时变、非线性和滞后性这些让人头疼的不确定性因素。就好比你开车,车的性能会突然变化,方向还不按常理走,这得多难搞!但咱就是要迎难而上。
模型建立
传递函数模型
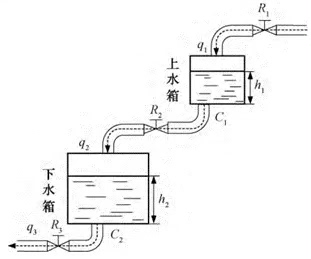
先来说说传递函数模型的建立。这得对双容水箱的物理结构和工作原理有透彻理解。想象一下水箱间水流的流动,通过质量守恒定律和流体力学相关知识,我们能推导出它的传递函数。以一个简单的双容水箱为例(假设水箱1流入流量为$q1$,流出流量为$q2$,水箱2流出流量为$q3$,水箱1液位为$h1$,水箱2液位为$h_2$):
\[
\frac{H2(s)}{Q1(s)}=\frac{K}{(T1s + 1)(T2s + 1)}
\]
这里$K$是增益系数,$T1$和$T2$是时间常数。在Matlab里,我们可以这样简单表示传递函数:
num = [K];
den = [T1*T2, T1 + T2, 1];
sys = tf(num, den);这段代码里,num是传递函数分子多项式系数,den是分母多项式系数,通过tf函数就构建好了传递函数模型sys。
状态空间方程模型
状态空间方程能更全面描述系统动态特性。定义状态变量,比如$x1 = h1$,$x2 = h2$,输入$u = q1$,输出$y = h2$。通过分析水箱间的水流关系,可以得到状态空间方程:
\[
\begin{cases}
\dot{x} = Ax + Bu \\
y = Cx + Du
双容水箱液位控制系统设计与仿真 实验软件:Matalb R2022a 包含完整项目报告、完整实验程序、实验结果配图 项目介绍: 本项目针对双容水箱液位控制系统存在状态时变、非线性和滞后性等诸多不确定性因素的问题,首先通过对双容水箱的分析,先后建立传递函数及状态空间方程两种模型,之后设计了常规PID控制器、SMITH预估控制器、模糊PID串级控制器、滑模变结构控制器这四种控制器,并将这四种控制器分别应用于本项目所构建的双容水箱液位控制系统中,对其分别进行SIMULINK仿真分析。
\end{cases}
\]
在Matlab里实现如下:
A = [ -1/(R1*C1), 1/(R1*C1); 1/(R2*C2), -1/(R2*C2) ];
B = [ 1/C1; 0 ];
C = [ 0, 1 ];
D = [ 0 ];
sys_ss = ss(A, B, C, D);这里A是状态矩阵,描述状态变量随时间变化关系;B是输入矩阵,体现输入对状态变量影响;C是输出矩阵,表明状态变量如何产生输出;D是直接传递矩阵(这里为0,因为一般水箱系统没有直接输入到输出的直通项)。通过ss函数构建状态空间模型sys_ss。
控制器设计与仿真
常规PID控制器
PID控制器算是控制领域的元老了,简单好用。它根据系统的误差,通过比例(P)、积分(I)、微分(D)三个环节来调整控制量。在Matlab的Simulink里搭建PID控制的双容水箱系统仿真模型,非常直观。
在Simulink中拖入PID Controller模块,设置好比例系数Kp、积分系数Ki、微分系数Kd。比如:
Kp = 10;
Ki = 0.5;
Kd = 2;合适的参数能让系统快速稳定,减少超调。调整参数就像调乐器,得反复试才能找到和谐的“音色”。
SMITH预估控制器
针对系统的滞后性,SMITH预估控制器就派上用场了。它能提前预估系统输出,补偿滞后环节。在Simulink搭建模型时,关键是构建SMITH预估器模块。假设系统纯滞后时间为$\tau$,传递函数为$G(s)$,则SMITH预估器传递函数为:
\[
G_{smith}(s)=G(s)(1 - e^{-\tau s})
\]
在Simulink里通过数学运算模块搭建这个传递函数。SMITH预估器就像给系统装了个“时间望远镜”,提前看到未来状态,让控制更精准。
模糊PID串级控制器
模糊PID串级控制器结合了模糊控制的灵活性和PID控制的精确性。先说说模糊控制,它模仿人类思维,把输入的误差和误差变化率模糊化,通过模糊规则推理出PID参数的调整量。
% 定义模糊输入变量
e_fis = newfis('e_fis');
e_fis = addvar(e_fis, 'input', 'e', [-3, 3]);
e_fis = addmf(e_fis, 'input', 1, 'NB', 'zmf', [-3, -1]);
e_fis = addmf(e_fis, 'input', 1, 'NS', 'trimf', [-2, 0, 2]);
% 类似定义误差变化率和输出变量及隶属度函数
% 定义模糊规则
rulelist = [1 1 1 1 1;
2 2 2 2 2;
% 更多规则
];
e_fis = addrule(e_fis, rulelist);这段代码简单展示了模糊控制器的创建,定义输入变量、隶属度函数,再构建模糊规则。串级控制则是两个PID控制器嵌套,内环快速响应,外环精准控制。就像给系统配了两个助手,一个管细节,一个管大局。
滑模变结构控制器
滑模变结构控制器有很强的鲁棒性,适合这种不确定性系统。它通过设计滑模面,让系统状态在滑模面上滑动,达到稳定控制。定义滑模面函数$s(x)$,然后设计控制律$u$,使得系统状态趋向滑模面。
% 假设状态变量x,滑模面系数c
c = [1, 1];
s = c * x;
% 设计控制律
u = -sign(s) * k; % k为控制增益这里简单示意了滑模变结构控制器的核心代码。滑模变结构控制器就像给系统定了条“轨道”,让它乖乖沿着轨道走。
实验结果
通过Simulink对四种控制器分别进行仿真,得到了不同的结果。常规PID控制器响应速度较快,但超调有点大;SMITH预估控制器很好地补偿了滞后,让系统更平稳;模糊PID串级控制器适应性强,能应对不同工况;滑模变结构控制器鲁棒性突出,面对干扰也能稳住。配上实验结果配图,能更直观看到各控制器的表现,这里就不一一展示啦。
这个双容水箱液位控制系统设计与仿真项目,真是充满挑战与惊喜,在探索不同模型和控制器的过程中,对控制系统的理解又加深了几分。希望我的分享能给大家带来启发。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 8
8 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)