含扰动观测器的伺服系统摩擦补偿永磁同步电机研究
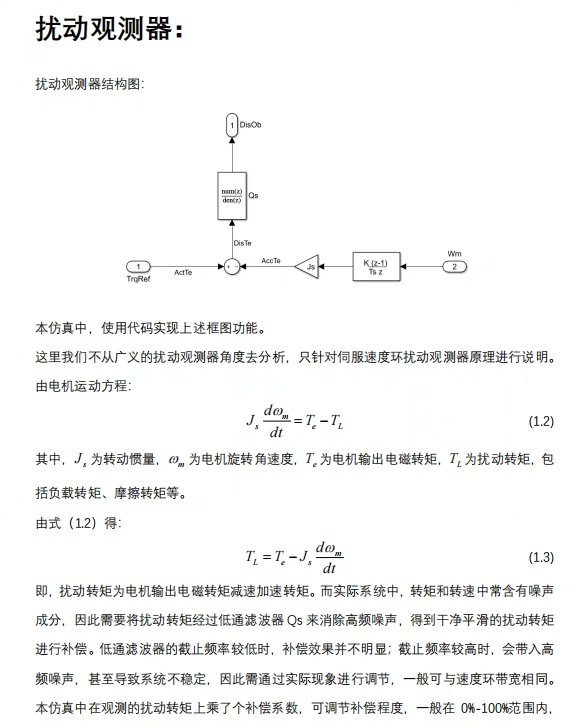
含扰动观测器的伺服系统摩擦补偿永磁同步电机研究 1.模型简介 模型为基于扰动观测器的摩擦补偿仿真,仿真基于永磁同步电机速度、电流双闭环控制结构开发,双环均采用PI控制,PI参数已经调好。 仿真中主要包含抗饱和PI控制器、摩擦力模型、扰动观测器、坐标变换、SVPWM、逆变器和永磁同步电机模块等,其中抗饱和PI控制器、摩擦力模型、扰动观测器、坐标变换、SVPWM模块均采用matlab function编程实现,其与C语言编程较为相似,容易进行实物移植。 模型均采用离散化仿真,其效果更接近实际数字控制系统。 2.算法简介 伺服系统中,由于摩擦力的存在,会降低系统响应,因此对摩擦力进行补偿是有必要的。 本仿真通过增加LuGre摩擦力模型,模拟摩擦力对系统性能的影响。 通过扰动观测器对摩擦力进行观测并进行补偿,降低摩擦力对系统性能的影响。 3.仿真效果 ① 加入摩擦力,速度给定为正弦波,模拟速度反复过零的情况。 由于摩擦力的存在,实际速度过零时不能很好的跟踪速度给定信号,0.6s前没有使用扰动观测器,速度过零时,速度跟踪误差很大。 0.6s后,开启扰动观测器,速度跟踪误差明显减小。 ② 电流环响应波形,电流环跟踪很好。 ③ LuGre摩擦力模型输出的摩擦转矩波形和扰动观测器输出的扰动转矩观测波形。 其中,0.6s后才开启扰动观测器。 可见观测的扰动转矩与摩擦转矩基本重合。 4、提供参考文献
随着现代工业对自动化和智能化要求的提高,伺服系统在工业控制、机器人控制等领域的应用越来越广泛。然而,伺服系统中由于摩擦力的存在,会导致系统的响应速度和精度下降。为了克服这一问题,许多研究者提出了摩擦补偿的方法。本文基于永磁同步电机(PMSM),通过引入扰动观测器和LuGre摩擦模型,对伺服系统进行摩擦补偿仿真研究。
1. 模型简介
1.1 模型结构
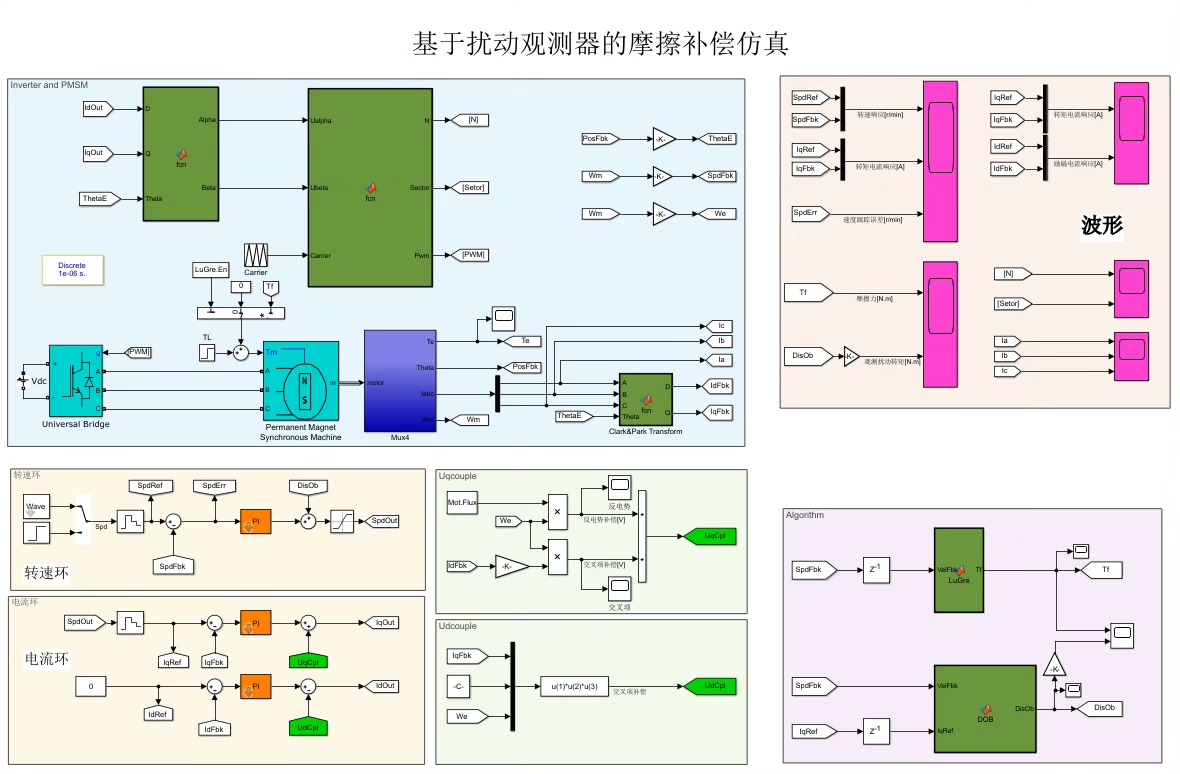
本文仿真模型基于永磁同步电机的双闭环控制结构,包含速度闭环和电流闭环两个控制环。速度闭环采用抗饱和PI控制器,电流闭环采用PI控制器。整个系统采用离散化仿真方法,以更好地反映数字控制系统的特点。
1.2 关键模块
- 抗饱和PI控制器:用于处理电机的速度控制,确保系统在过零点时的跟踪能力。
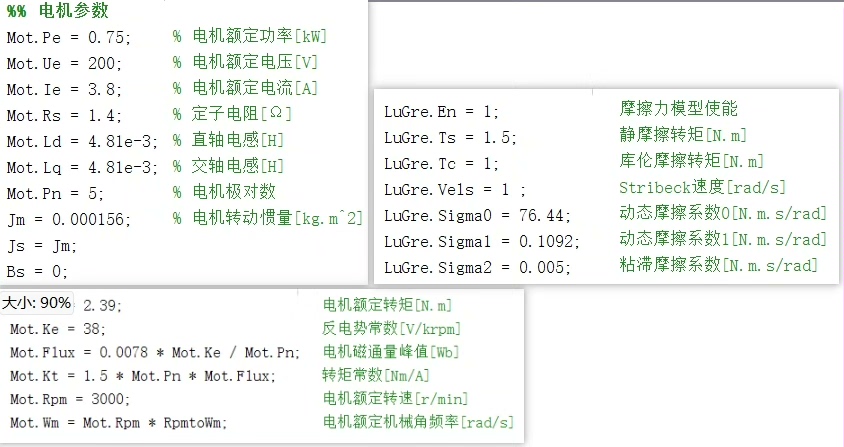
- 摩擦力模型:采用LuGre摩擦模型,能够有效模拟摩擦力的动态特性。
- 扰动观测器:用于观测并补偿系统的摩擦扰动,提高系统性能。
- 坐标变换模块:实现电机参数的旋转坐标系变换。
- SVPWM模块:用于驱动逆变器,实现电机的驱动控制。
1.3 代码实现
以下是一个简单的Matlab函数,用于实现抗饱和PI控制器:
function [output] = antiSaturationPI(input, Kp, Ki, satLimit)
% 反馈误差
e = input - feedback;
% 积分项
integral = integral + Ki * e * Ts;
% 输出
output = Kp * e + integral;
% 检查积分上限
if output > satLimit
output = satLimit;
elseif output < -satLimit
output = -satLimit;
end
end1.4 仿真特点
- 离散化仿真:采用Tustin方法进行离散化,确保仿真结果与实际数字控制系统一致。
- 模块化设计:各模块采用Matlab函数实现,便于扩展和维护。
2. 算法简介
2.1 摩擦补偿原理
在伺服系统中,摩擦力会降低系统的响应速度和精度。通过引入扰动观测器,可以实时观测摩擦力,并将其补偿到系统中,从而提高系统的性能。
2.2 LuGre摩擦模型
LuGre摩擦模型是一种基于状态空间的摩擦模型,能够有效描述摩擦力的动态特性。该模型通过速度和加速度的状态变量,模拟摩擦力的生成过程。
2.3 扰动观测器
扰动观测器是一种用于观测未知扰动的估计器。在本文中,观测器用于估计系统的摩擦扰动,并将其补偿到系统中。
3. 仿真效果
3.1 速度跟踪效果
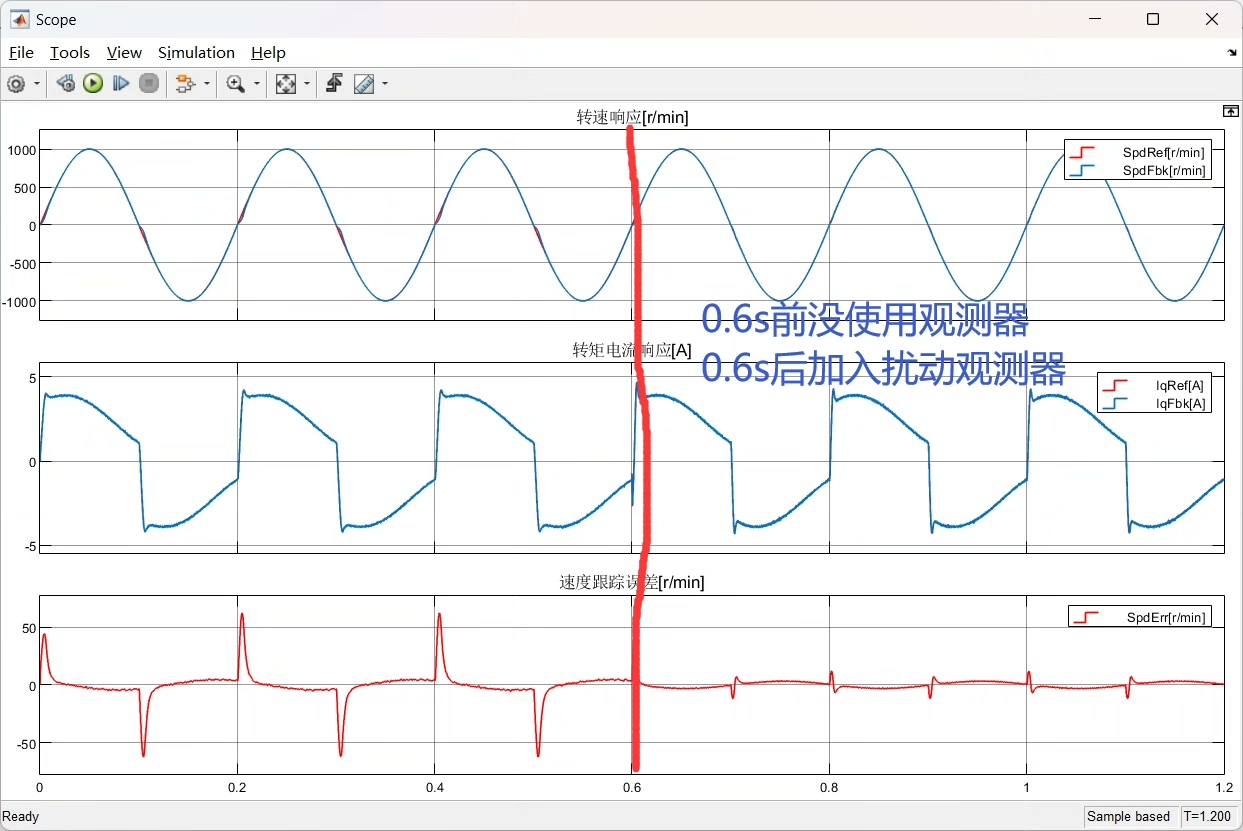
在仿真中,速度给定为正弦波,模拟了速度反复过零的情况。结果表明:
- 在0.6s前,未开启扰动观测器,速度过零时的跟踪误差较大。
- 在0.6s后,开启扰动观测器后,速度跟踪误差显著减小。
3.2 电流环响应
电流环的响应效果良好,表明PI控制器能够有效控制电流跟踪。
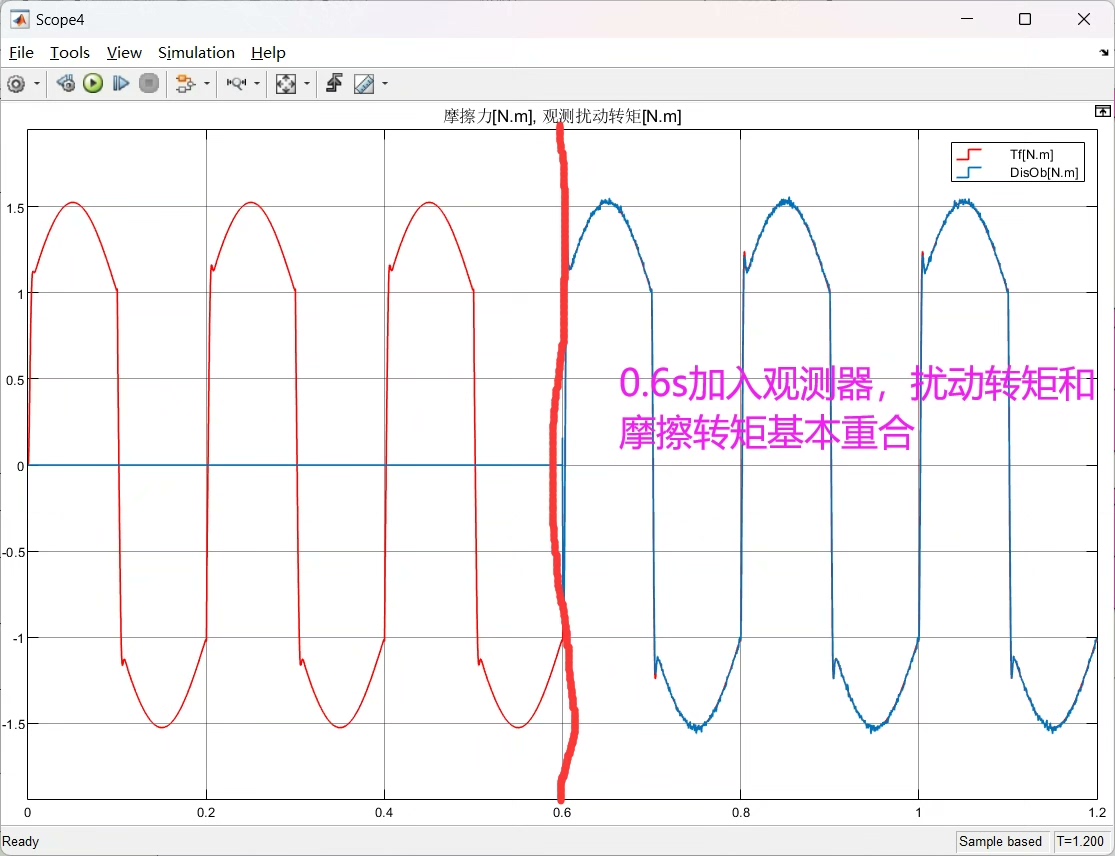
3.3 摩擦力波形
仿真结果表明,扰动观测器观测的扰动转矩与LuGre摩擦模型输出的摩擦转矩基本一致,验证了扰动观测器的有效性。
4. 仿真代码示例
以下是用于生成仿真结果的Matlab代码示例:
% 参数设置
Kp_speed = 10; % 速度PI控制器增益
Ki_speed = 0.1; % 速度PI控制器积分增益
satLimit = 10; % 反馈饱和限值
Ts = 0.001; % 采样时间
% 反馈信号
feedback = zeros(N, 1);
% 初始化
integral = 0;
output = zeros(N, 1);
% 仿真循环
for i = 1:N
e = desired_speed(i) - feedback(i);
integral = integral + Ki_speed * e * Ts;
output(i) = Kp_speed * e + integral;
if output(i) > satLimit
output(i) = satLimit;
elseif output(i) < -satLimit
output(i) = -satLimit;
end
feedback(i+1) = output(i);
end5. 结论
本文针对永磁同步电机伺服系统中的摩擦问题,提出了一种基于扰动观测器的摩擦补偿方法。通过仿真,验证了该方法的有效性,特别是在速度跟踪和系统稳定性方面的优势。未来的工作可以进一步优化扰动观测器的参数,提高系统的响应速度和精度。
参考文献
1.Slotine, J. J., & Li, W. (1991). Applied Nonlinear Control. Prentice Hall.
含扰动观测器的伺服系统摩擦补偿永磁同步电机研究 1.模型简介 模型为基于扰动观测器的摩擦补偿仿真,仿真基于永磁同步电机速度、电流双闭环控制结构开发,双环均采用PI控制,PI参数已经调好。 仿真中主要包含抗饱和PI控制器、摩擦力模型、扰动观测器、坐标变换、SVPWM、逆变器和永磁同步电机模块等,其中抗饱和PI控制器、摩擦力模型、扰动观测器、坐标变换、SVPWM模块均采用matlab function编程实现,其与C语言编程较为相似,容易进行实物移植。 模型均采用离散化仿真,其效果更接近实际数字控制系统。 2.算法简介 伺服系统中,由于摩擦力的存在,会降低系统响应,因此对摩擦力进行补偿是有必要的。 本仿真通过增加LuGre摩擦力模型,模拟摩擦力对系统性能的影响。 通过扰动观测器对摩擦力进行观测并进行补偿,降低摩擦力对系统性能的影响。 3.仿真效果 ① 加入摩擦力,速度给定为正弦波,模拟速度反复过零的情况。 由于摩擦力的存在,实际速度过零时不能很好的跟踪速度给定信号,0.6s前没有使用扰动观测器,速度过零时,速度跟踪误差很大。 0.6s后,开启扰动观测器,速度跟踪误差明显减小。 ② 电流环响应波形,电流环跟踪很好。 ③ LuGre摩擦力模型输出的摩擦转矩波形和扰动观测器输出的扰动转矩观测波形。 其中,0.6s后才开启扰动观测器。 可见观测的扰动转矩与摩擦转矩基本重合。 4、提供参考文献
2.LuGre, S. (1995). A control-Law Candidate for the control of friction. IEEE Transactions on Automatic Control, 40(10), 1309-1313.
3.Zhu, Y., & Han, X. (2018). Robust disturbance observer-based control for permanent magnet synchronous motor servo systems. IEEE Transactions on Industrial Electronics, 65(10), 8233-8242.

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)