探索自动驾驶量产核心:车道居中 LKA/LCA 控制算法及 Matlab Simulink 模型
量产 自动驾驶 无人驾驶 adas 车道居中lka/lca控制算法 matlab simulink模型,量产模型,可生成代码,内含角度控制,扭矩控制两套逻辑,可用于学习,也可进行仿真或实车跑,但需要根据环境进行封装,附角度控制简易说明以及扭矩控制标定
在自动驾驶这个前沿领域,量产级别的技术研发是迈向未来交通的关键一步。今天咱们就来深入聊聊自动驾驶中车道居中 LKA(车道保持辅助)/LCA(车道居中辅助)控制算法,以及与之紧密相关的 Matlab Simulink 量产模型。
一、自动驾驶与车道居中控制算法的重要性
随着科技的飞速发展,自动驾驶不再是遥不可及的梦想。从早期的 ADAS(高级驾驶辅助系统),一步步朝着无人驾驶迈进。而车道居中控制算法,就如同自动驾驶汽车的“方向盘精灵”,它能让车辆稳稳地行驶在车道中央,大大提升了行车安全性与舒适性。
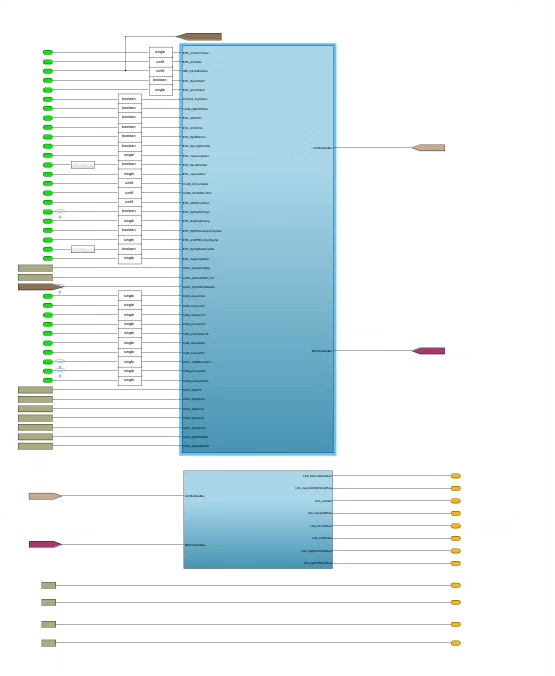
二、Matlab Simulink 模型:量产的基石
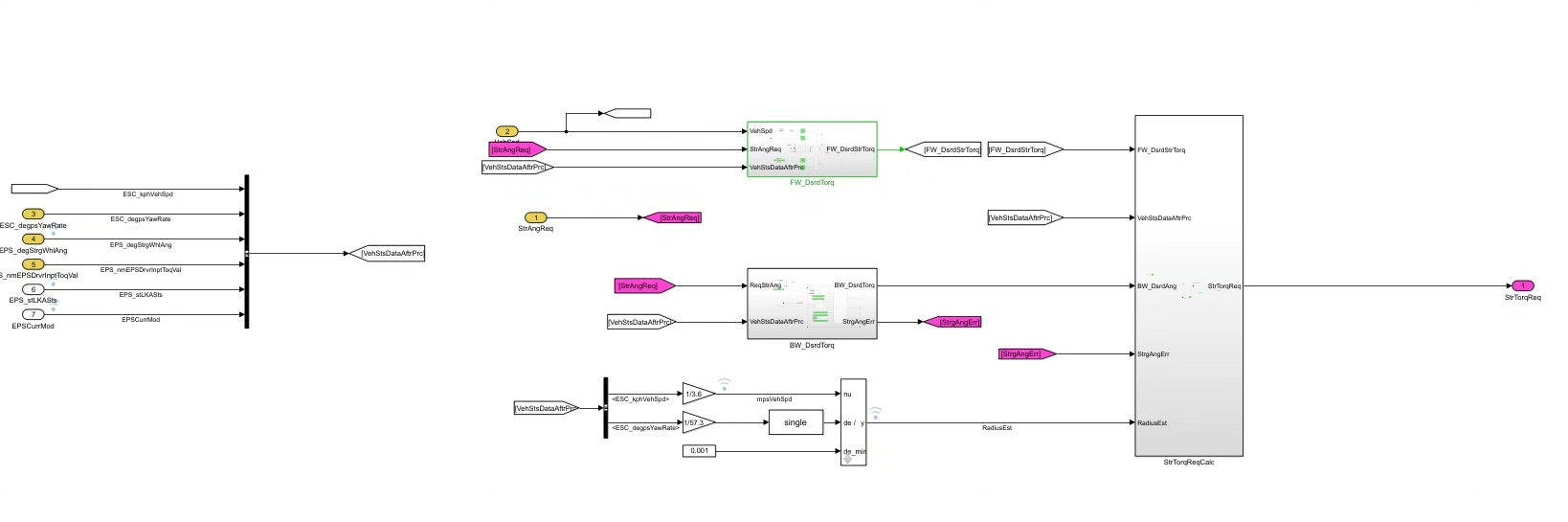
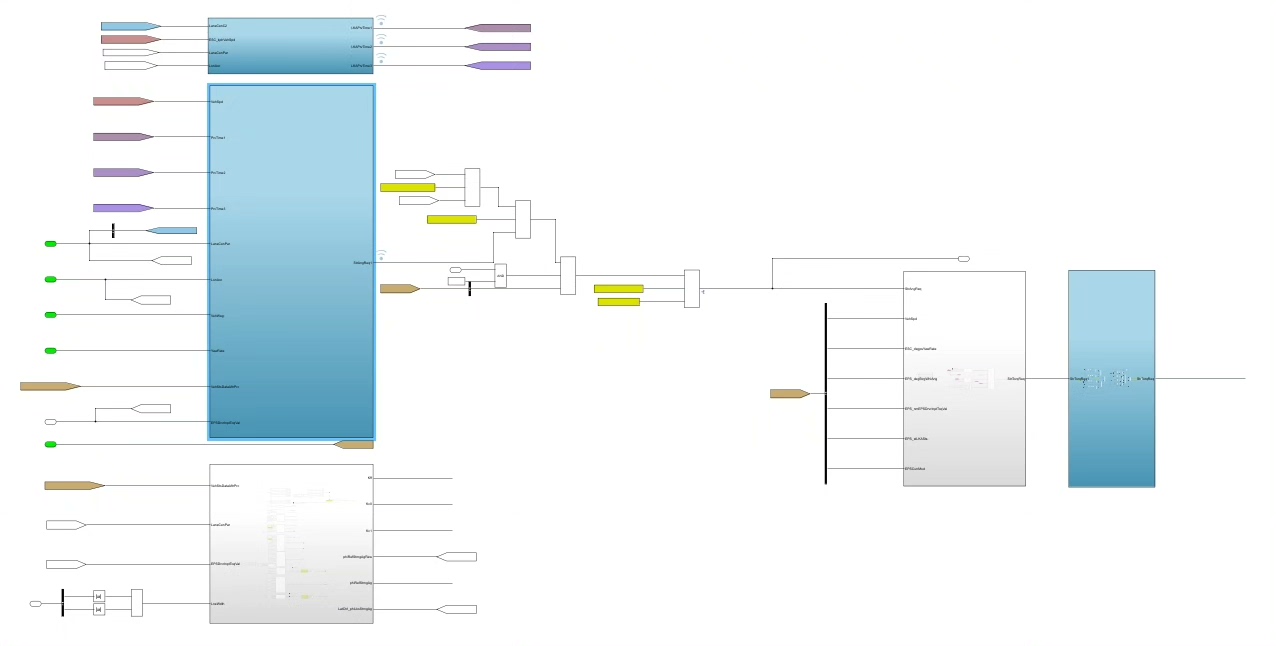
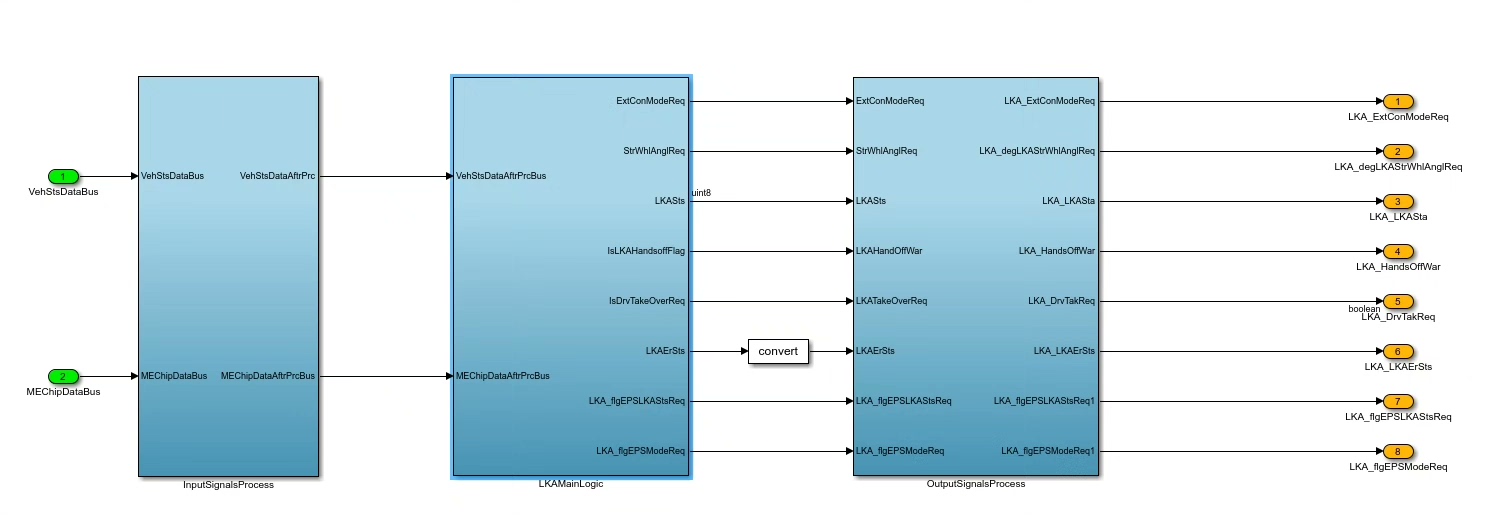
Matlab Simulink 是工程师们开发自动驾驶算法的得力工具。咱们这里的车道居中 LKA/LCA 控制算法,通过 Simulink 搭建出了可用于量产的模型。这个模型可不是吃素的,它具备生成代码的能力,这意味着它能够无缝衔接到实际的汽车控制系统中。
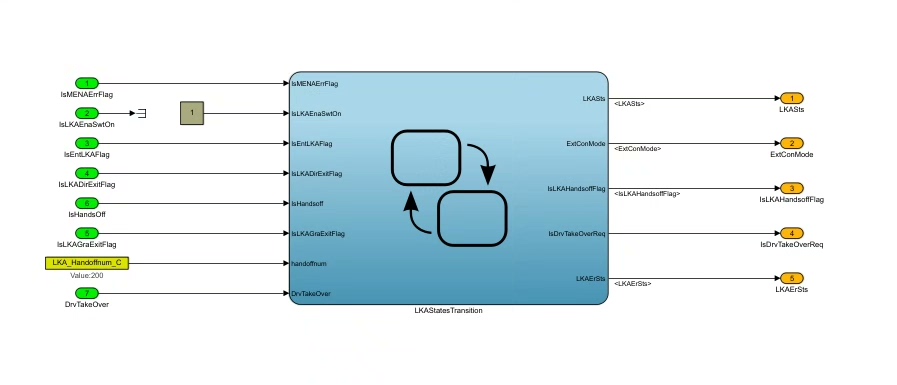
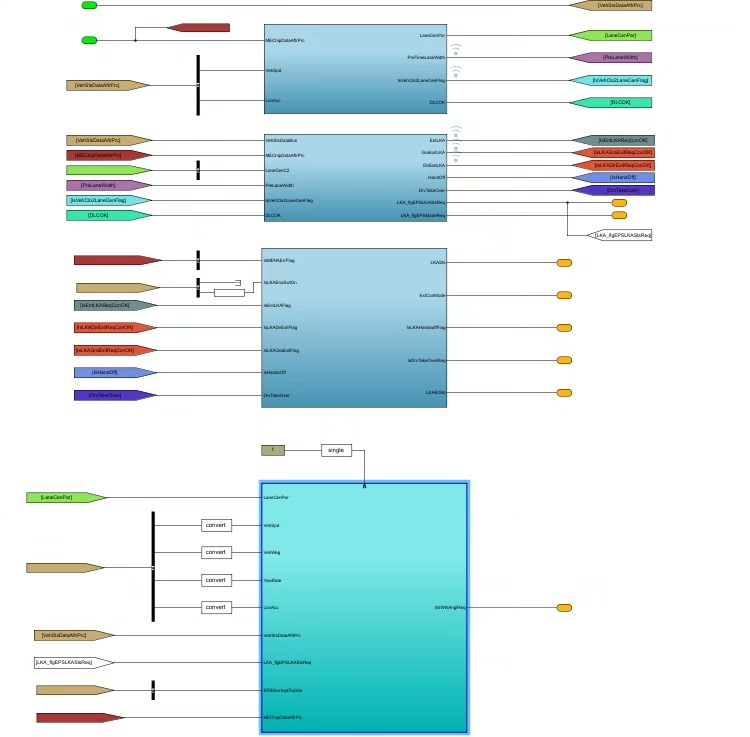
三、核心逻辑:角度控制与扭矩控制
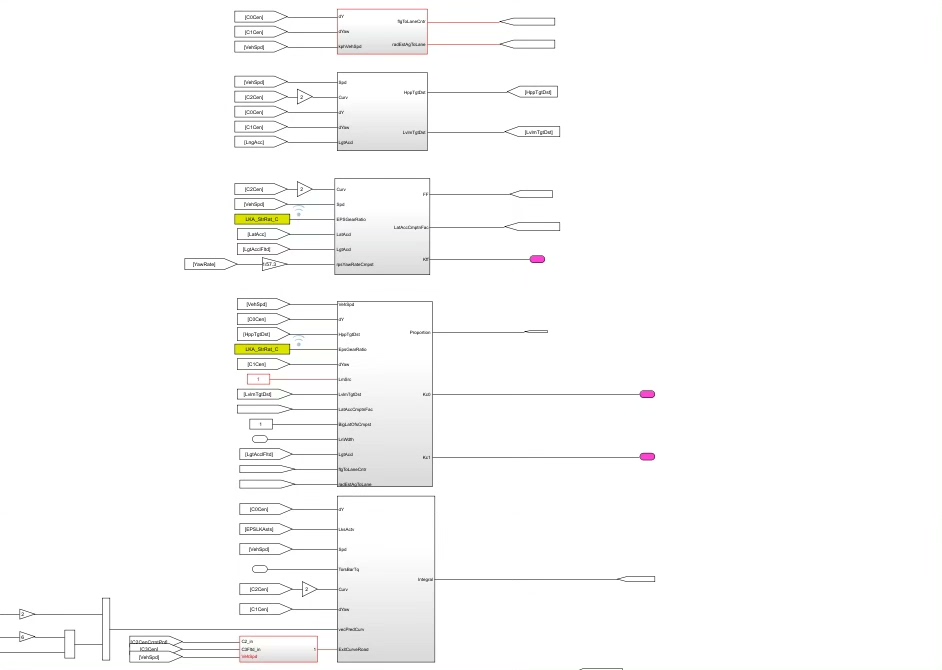
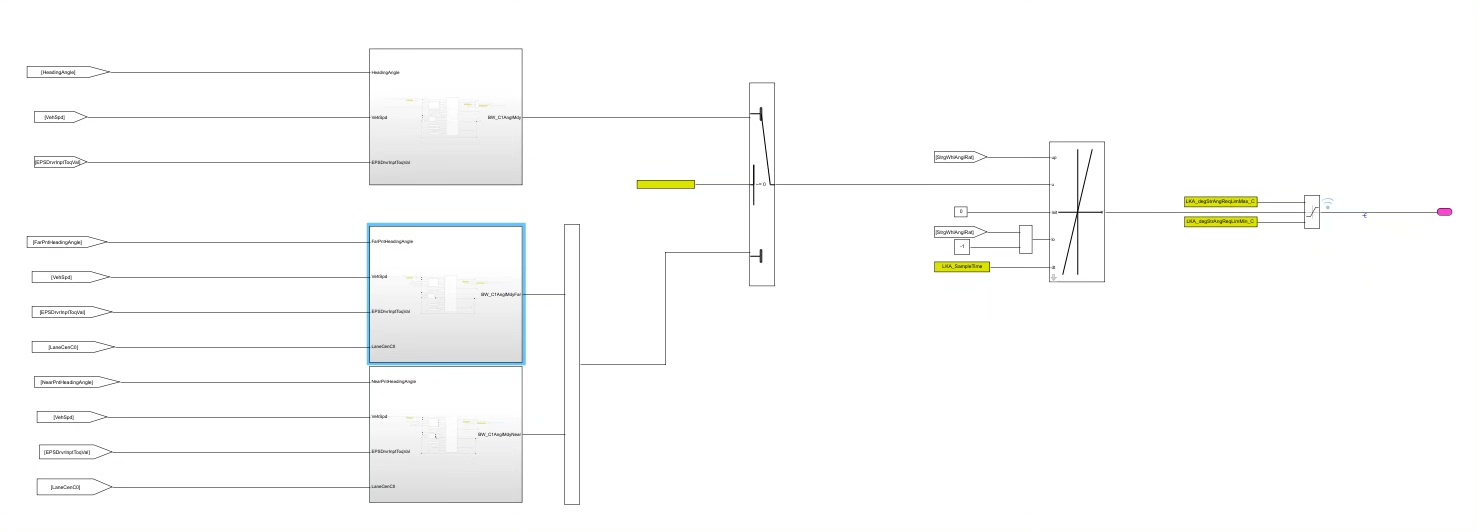
- 角度控制逻辑
- 代码示例:
% 简化的角度控制代码示例
function angle = calculate_steering_angle(error, speed)
kp = 0.5; % 比例系数
angle = kp * error * speed;
end- 分析:这段简单的代码展示了角度控制的基础思路。
error代表车辆当前位置与车道中心的偏差,speed是车辆行驶速度。通过一个比例系数kp,将偏差和速度结合起来计算出需要调整的转向角度angle。实际应用中,这个kp值需要根据不同车型、路况等因素进行精细调整。
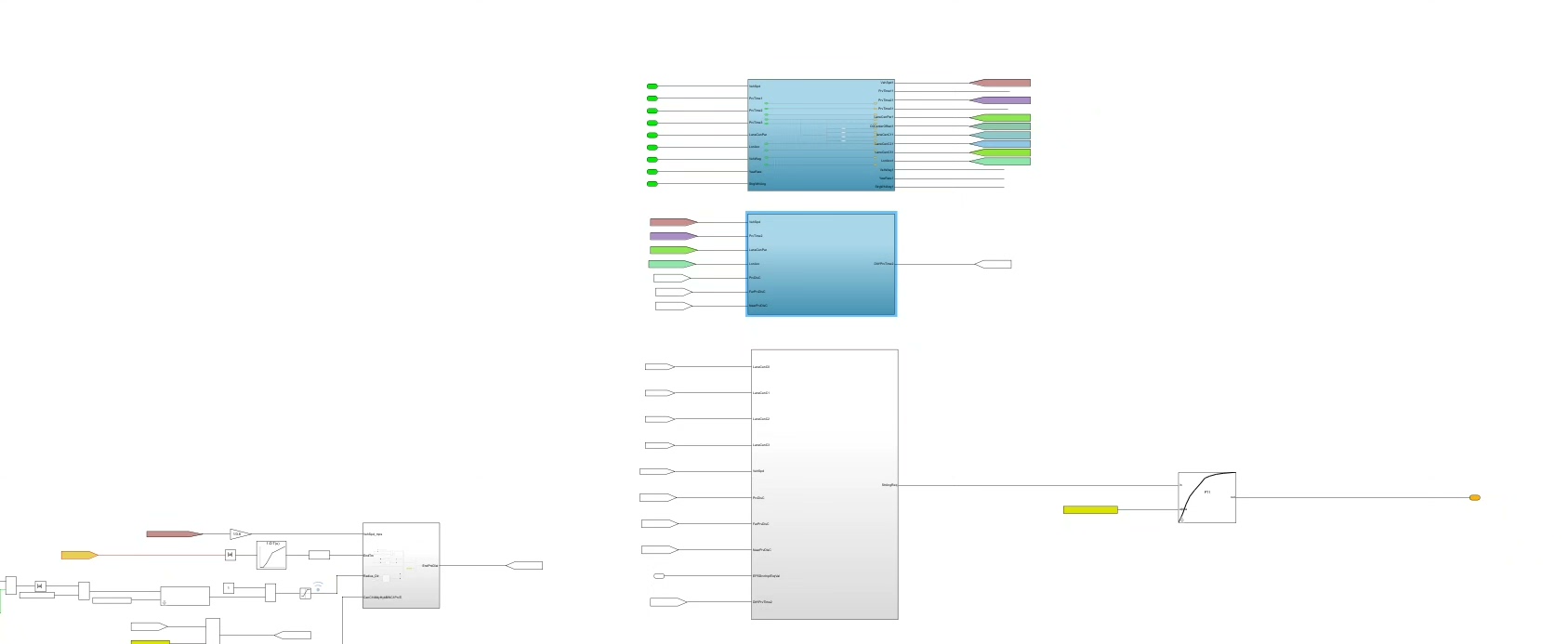
- 扭矩控制逻辑
- 代码示例:
% 扭矩控制代码示例
function torque = calculate_torque(angle, vehicle_mass)
k_torque = 0.2; % 扭矩系数
torque = k_torque * angle * vehicle_mass;
end- 分析:这里根据计算出的转向角度
angle以及车辆质量vehiclemass来计算所需的扭矩torque。扭矩系数ktorque同样需要进行标定。它决定了车辆转向时需要施加多大的扭矩,以确保车辆能够按照预期的角度转向。
四、扭矩控制标定
扭矩控制标定可不是一件轻松的事儿。它需要工程师们在各种不同的路况、车辆负载等条件下进行反复测试。比如在不同的路面摩擦力环境下,车辆所需的扭矩是不同的。通过大量的数据采集和分析,不断调整扭矩控制算法中的参数,让车辆无论何时都能以最合适的扭矩进行转向操作,确保行驶的稳定性和安全性。
五、模型的应用与封装
咱们这个 Matlab Simulink 模型功能强大,既可以用于学习,帮助新手快速理解车道居中控制的原理;也能进行仿真测试,在虚拟环境中模拟各种复杂路况,提前发现算法中的潜在问题。要是想应用到实车跑,那就需要根据实际的车辆环境、传感器配置等进行封装。这就好比给模型穿上一件“合身的衣服”,让它能够完美适配实车的硬件系统。
量产 自动驾驶 无人驾驶 adas 车道居中lka/lca控制算法 matlab simulink模型,量产模型,可生成代码,内含角度控制,扭矩控制两套逻辑,可用于学习,也可进行仿真或实车跑,但需要根据环境进行封装,附角度控制简易说明以及扭矩控制标定
自动驾驶车道居中控制算法及其 Matlab Simulink 量产模型,是推动自动驾驶从理论走向实际应用的关键环节。希望通过今天的分享,大家对这个领域有了更深入的了解,一起期待自动驾驶时代的全面到来!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 2
2 0
0- 0



 已为社区贡献45条内容
已为社区贡献45条内容

所有评论(0)