基于混合A*算法的泊车路径规划探索
基于混合A*算法的泊车路过规划 本模型使用MATLAB编写的基于混合A*算法的自动泊车路径规划。 功能如下: 1、实现垂直泊车(倒车入库); 2、实现平行泊车; 3、倾斜60°的泊车; 4、实现考虑车辆运动学的泊车路径规划避障控制 附了参考文献
最近在研究自动泊车相关的技术,发现基于混合A*算法的自动泊车路径规划挺有意思,今天就来和大家分享分享,这个模型是用MATLAB编写的哦。
一、混合A*算法简述
混合A算法结合了传统A算法在搜索空间上的优势以及考虑车辆运动学特性的特点。传统A算法是一种在图中寻找从起始点到目标点最优路径的搜索算法,它通过评估函数f(n)=g(n)+h(n)来引导搜索方向,其中g(n)是从起点到节点n的实际代价,h(n)是从节点n到目标点的估计代价。而混合A算法针对车辆运动的特点,对搜索空间进行了更合理的约束,例如考虑车辆的转向半径等运动学限制,使得规划出的路径更符合车辆实际行驶情况。
二、功能实现
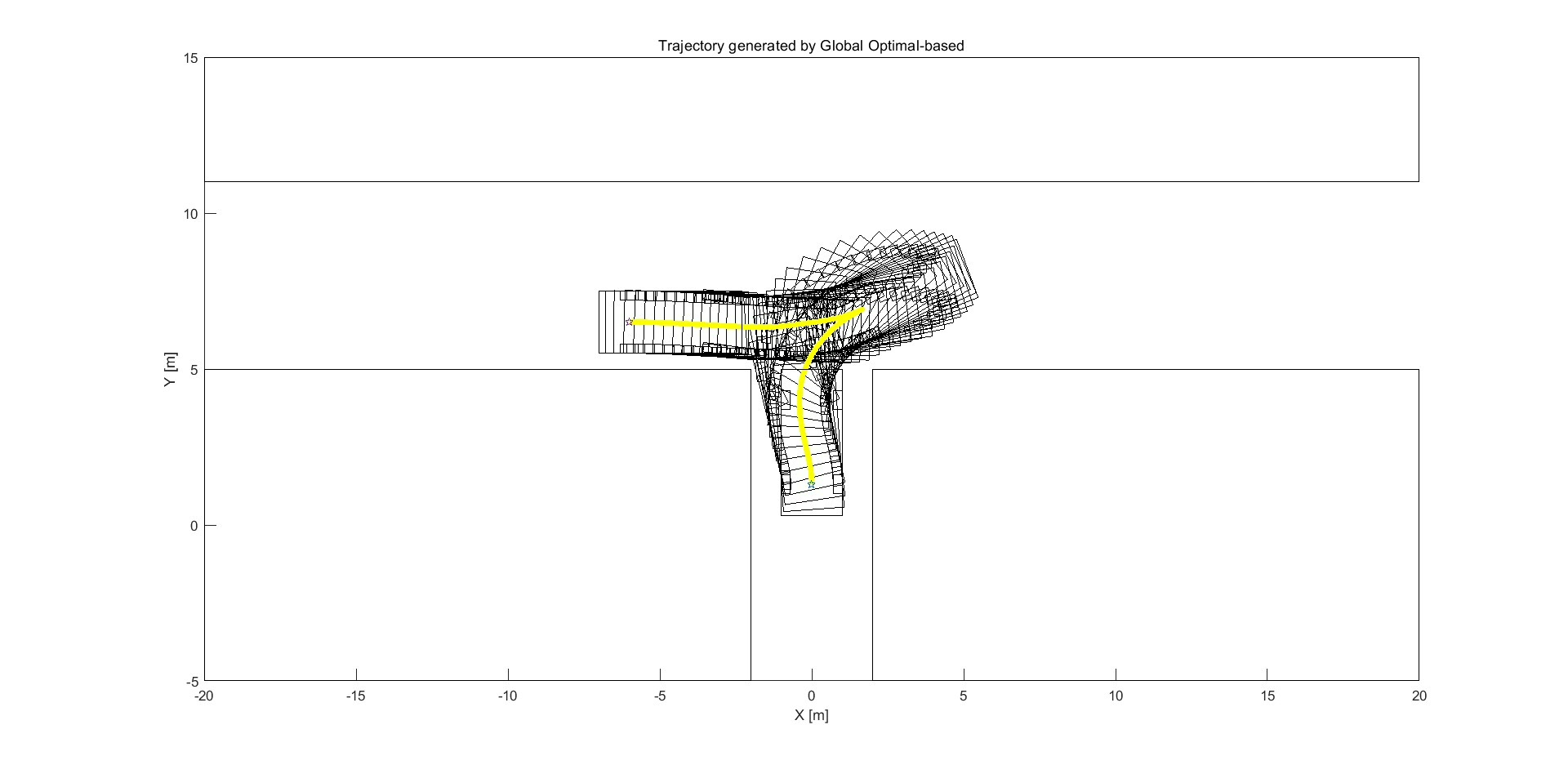
1. 垂直泊车(倒车入库)
在MATLAB中实现垂直泊车功能,关键在于对车辆运动模型的构建以及搜索空间的定义。以下是一个简单示意代码(简化核心部分,实际需更完善):
% 定义车辆参数
vehicleLength = 4.5;
vehicleWidth = 1.8;
turningRadius = 3;
% 定义停车场空间范围
xMin = 0; xMax = 20;
yMin = 0; yMax = 10;
% 初始化起始点和目标点
startPoint = [5, 2, 0]; % [x, y, theta]
goalPoint = [10, 6, pi];
% 构建搜索空间
gridResolution = 0.1;
[xGrid, yGrid, thetaGrid] = meshgrid(xMin:gridResolution:xMax, yMin:gridResolution:yMax, -pi:0.1:pi);
% 这里省略实际搜索路径部分代码代码分析:首先定义了车辆的一些基本参数,像长度、宽度和转向半径,这些参数会影响车辆的可行驶区域和路径规划。接着定义停车场空间范围,这限定了我们搜索路径的边界。然后初始化起始点和目标点,这里用[x, y, theta]表示车辆位置和朝向。最后构建搜索空间,通过meshgrid函数创建三维网格表示不同位置和朝向的状态,网格分辨率决定了搜索的精细程度。
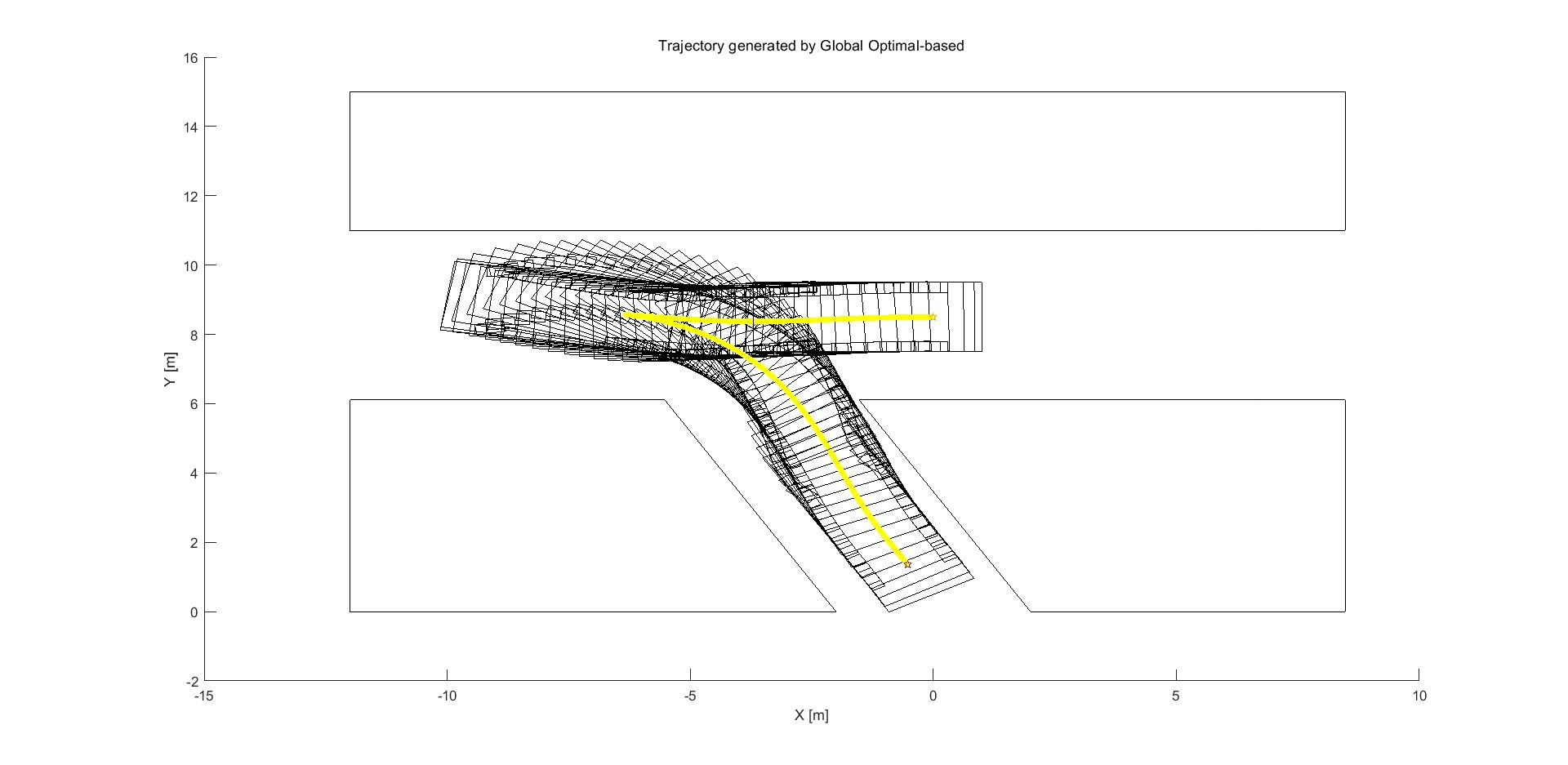
2. 平行泊车
平行泊车实现时,与垂直泊车类似,但目标点和搜索策略稍有不同。
% 重新定义目标点用于平行泊车
goalPointParallel = [12, 3, 0];
% 调整搜索策略以适应平行泊车特点
% 例如更注重车辆侧向移动这里重新定义了平行泊车的目标点,在实际代码中,还需要根据平行泊车时车辆主要是侧向移动的特点,调整搜索策略,例如在评估函数中对侧向移动的代价权重进行调整,以引导算法规划出合适的平行泊车路径。
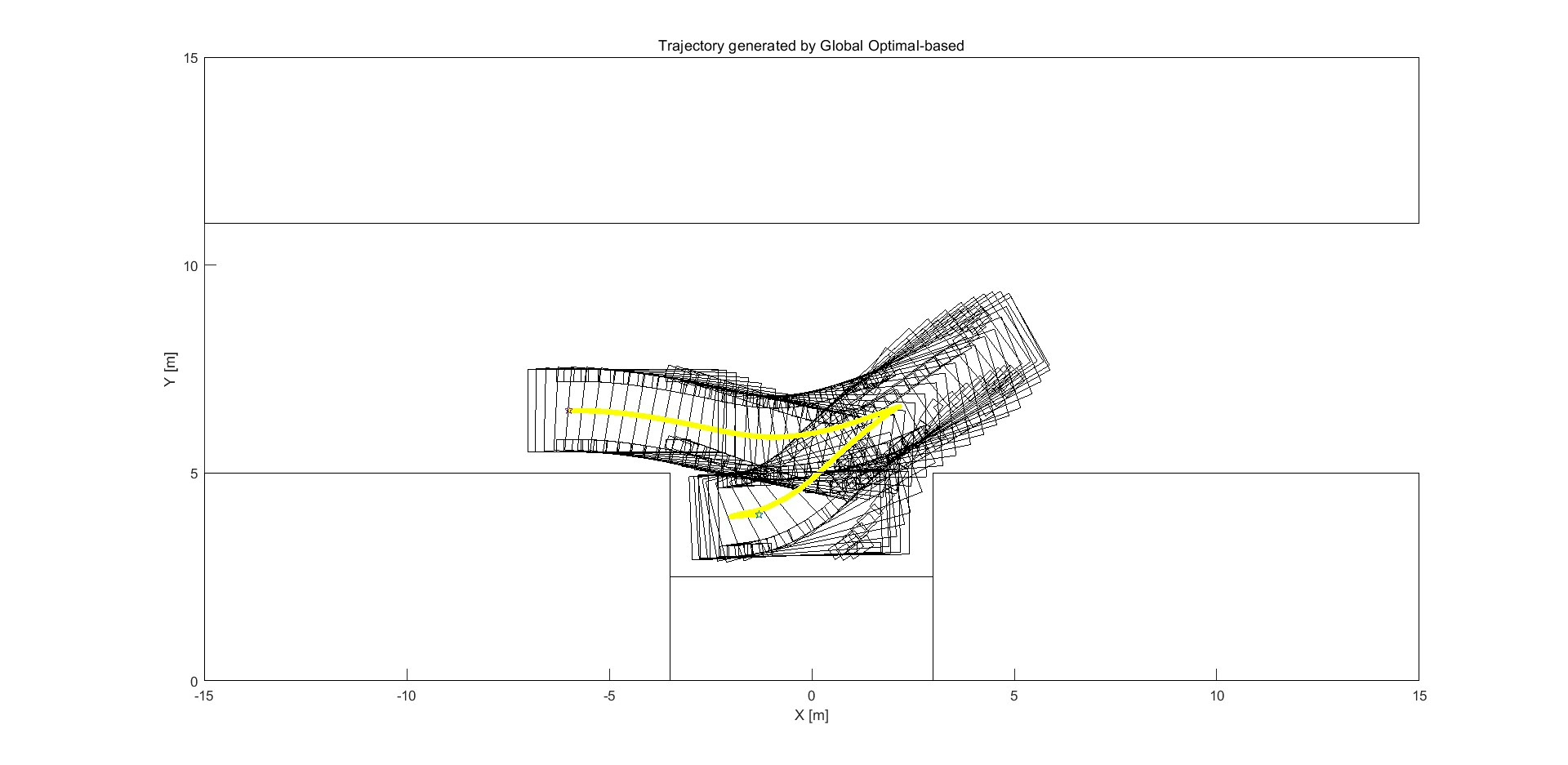
3. 倾斜60°的泊车
倾斜泊车需要对车辆的朝向和运动方向进行更细致的控制。
% 倾斜60°目标点定义
goalPointTilted = [8, 5, pi/3];
% 考虑倾斜角度的运动模型调整
% 假设这里有函数adjustMotionModel根据倾斜角度调整运动参数
adjustedModel = adjustMotionModel(pi/3);这里先定义了倾斜60°(即pi/3弧度)的目标点,然后通过一个假设的函数adjustMotionModel来根据倾斜角度调整车辆的运动模型参数,以确保规划出的路径能实现倾斜泊车。
4. 考虑车辆运动学的泊车路径规划避障控制
在实际泊车场景中,避障是非常关键的。这就需要在路径规划过程中,实时检测路径是否会与障碍物冲突。
% 假设障碍物位置
obstacle = [7, 4];
% 在搜索路径过程中检测与障碍物冲突
for i = 1:length(path)
if distance(path(i, 1:2), obstacle) < vehicleRadius
% 如果太近则认为冲突,重新规划或调整路径
% 这里可以使用局部重规划算法
end
end代码中假设定义了一个障碍物位置,在遍历规划出的路径时,计算路径点与障碍物的距离,如果距离小于车辆半径,就认为发生冲突,此时可以采用局部重规划算法,比如重新以冲突点附近为起始点进行小规模的路径搜索,以避开障碍物。
三、结语
基于混合A*算法的自动泊车路径规划在实际应用中有很大潜力,通过MATLAB实现这些功能,可以帮助我们更好地理解和优化自动泊车过程。当然,实际应用中还需要考虑更多的现实因素,希望这篇博文能给对自动泊车技术感兴趣的小伙伴一些启发。
基于混合A*算法的泊车路过规划 本模型使用MATLAB编写的基于混合A*算法的自动泊车路径规划。 功能如下: 1、实现垂直泊车(倒车入库); 2、实现平行泊车; 3、倾斜60°的泊车; 4、实现考虑车辆运动学的泊车路径规划避障控制 附了参考文献
参考文献:[此处可附上具体参考文献]

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 6
6 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)