车辆纵向动力学模型预测控制(等式约束)及Matlab数值仿真实验
车辆纵向动力学模型预测控制(等式约束),Matlab数值仿真实验。
在车辆动力学控制领域,模型预测控制(MPC)凭借其对复杂系统的有效处理能力而备受关注。今天咱就唠唠车辆纵向动力学模型预测控制,特别是带有等式约束的情况,顺便看看如何用Matlab搞数值仿真实验。
车辆纵向动力学模型
车辆纵向动力学主要描述车辆沿行驶方向的运动状态。简单来说,车辆的加速度 $a$ 与驱动力 $F{t}$、阻力 $F{r}$ 相关。一般的车辆纵向动力学模型可表示为:
\[ m \cdot a = F{t} - F{r} \]
车辆纵向动力学模型预测控制(等式约束),Matlab数值仿真实验。
其中,$m$ 是车辆质量。阻力 $F{r}$ 又可以细分为滚动阻力 $F{roll}$、空气阻力 $F{air}$ 等,即 \( F{r} = F{roll} + F{air} \)。滚动阻力 \( F{roll} = \mu{r} \cdot m \cdot g \),这里 \( \mu{r} \) 是滚动阻力系数,$g$ 是重力加速度。空气阻力 \( F{air} = \frac{1}{2} \cdot \rho \cdot C{D} \cdot A \cdot v^{2} \),其中 \( \rho \) 是空气密度,\( C{D} \) 是空气阻力系数,\( A \) 是车辆迎风面积,\( v \) 是车速。
模型预测控制(MPC)与等式约束
MPC的核心思想是基于系统当前状态,预测未来一段时间内系统的行为,并通过优化控制输入,使得系统输出尽可能跟踪期望轨迹。在车辆纵向控制中,我们希望车辆速度能跟踪给定的速度曲线。
等式约束在这个过程中起着关键作用。比如,我们可能有这样的约束:驱动力不能超过发动机所能提供的最大驱动力,即 \( F{t} \leq F{t,max} \)。在MPC优化问题里,这就是一个典型的等式约束条件。
Matlab数值仿真实验
建立模型
% 车辆参数设置
m = 1500; % 车辆质量 (kg)
g = 9.81; % 重力加速度 (m/s^2)
mu_r = 0.015; % 滚动阻力系数
rho = 1.225; % 空气密度 (kg/m^3)
C_D = 0.3; % 空气阻力系数
A = 2.5; % 迎风面积 (m^2)
F_t_max = 5000; % 最大驱动力 (N)
% 时间参数
dt = 0.1; % 采样时间 (s)
T = 10; % 总仿真时间 (s)
N = T/dt; % 仿真步数
time = 0:dt:T-dt;
% 初始化变量
v = zeros(1, N); % 速度
a = zeros(1, N); % 加速度
F_t = zeros(1, N); % 驱动力
F_r = zeros(1, N); % 总阻力
F_roll = zeros(1, N); % 滚动阻力
F_air = zeros(1, N); % 空气阻力
% 初始条件
v(1) = 0;在这段代码里,我们先设定了车辆的各种参数,包括质量、阻力系数等,还设定了仿真的时间参数,像采样时间、总仿真时间。然后初始化了一堆变量,用来存储速度、加速度、力等信息。最后给定了初始速度为0。
实现MPC控制
% 期望速度曲线
v_desired = 20 * ones(1, N); % 期望速度 20 m/s
for k = 1:N - 1
% 计算阻力
F_roll(k) = mu_r * m * g;
F_air(k) = 0.5 * rho * C_D * A * v(k)^2;
F_r(k) = F_roll(k) + F_air(k);
% MPC控制,简单考虑驱动力不超过最大值
if v(k) < v_desired(k)
F_t(k) = F_r(k) + m * (v_desired(k + 1) - v(k)) / dt;
if F_t(k) > F_t_max
F_t(k) = F_t_max;
end
else
F_t(k) = F_r(k) - m * (v(k) - v_desired(k + 1)) / dt;
if F_t(k) < 0
F_t(k) = 0;
end
end
% 计算加速度和更新速度
a(k) = (F_t(k) - F_r(k)) / m;
v(k + 1) = v(k) + a(k) * dt;
end这里我们设定了一个恒定的期望速度曲线。在循环里,每一步先计算滚动阻力和空气阻力,从而得到总阻力。然后根据MPC的思想,结合等式约束(驱动力不超过最大值)来计算当前步的驱动力。最后根据动力学公式计算加速度,并更新速度。
结果绘图
figure;
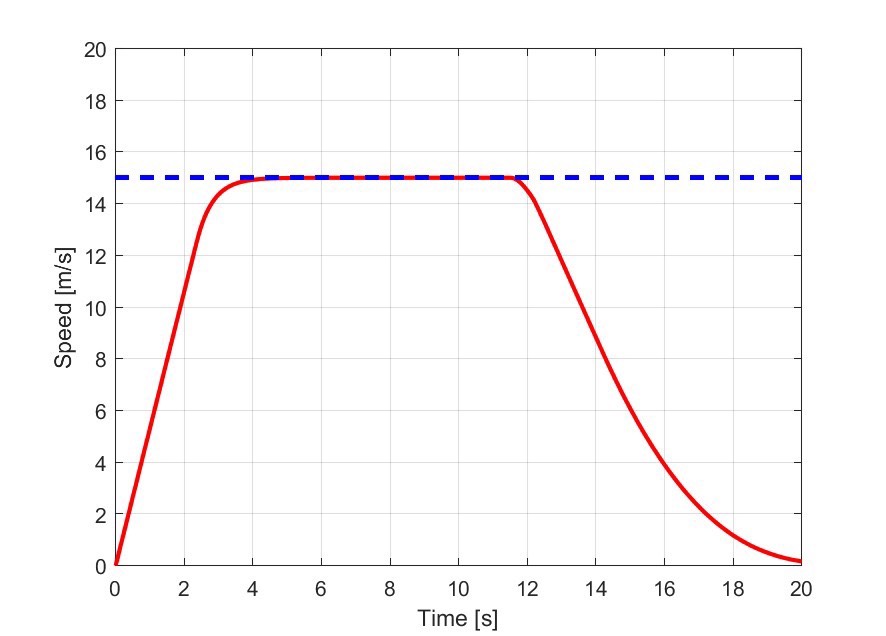
subplot(3,1,1);
plot(time, v, 'b', time, v_desired, 'r--');
xlabel('Time (s)');
ylabel('Velocity (m/s)');
legend('Actual Velocity', 'Desired Velocity');
title('Vehicle Velocity');
subplot(3,1,2);
plot(time, a, 'b');
xlabel('Time (s)');
ylabel('Acceleration (m/s^2)');
title('Vehicle Acceleration');
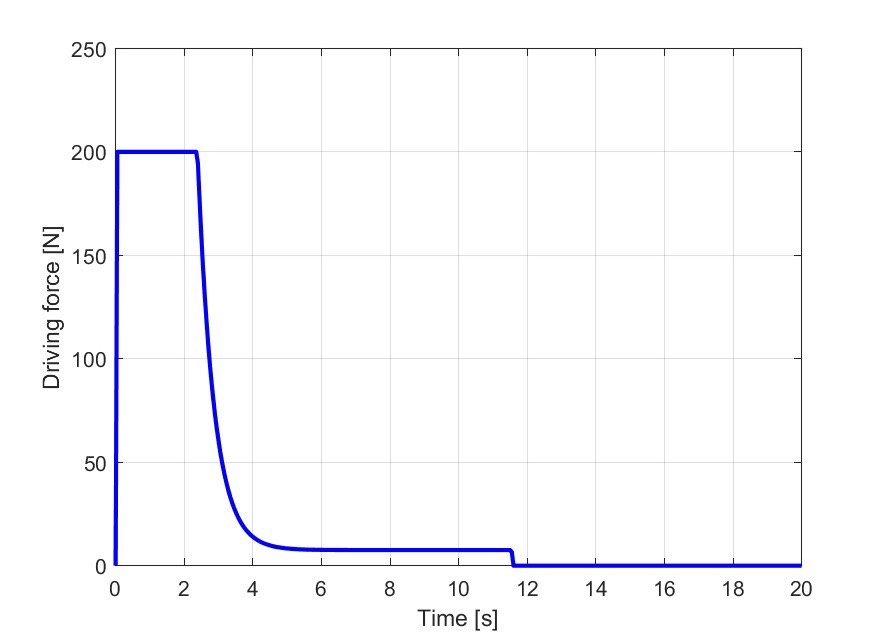
subplot(3,1,3);
plot(time, F_t, 'b');
xlabel('Time (s)');
ylabel('Driving Force (N)');
title('Vehicle Driving Force');这段代码是用来绘制仿真结果的。我们分别绘制了实际速度与期望速度对比图、加速度随时间变化图、驱动力随时间变化图,这样能直观地看到车辆纵向动力学在MPC控制下的表现。
通过上述Matlab数值仿真实验,我们对车辆纵向动力学模型预测控制(等式约束)有了更直观的认识。当然,实际的车辆控制会更复杂,这里只是一个简单的示例,希望能给大家一点启发。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 9
9 0
0- 0



 已为社区贡献64条内容
已为社区贡献64条内容

所有评论(0)