基于PID控制的无人机巡航仿真(Matlab代码实现)——四旋翼无人机三轴位置 + 偏航角的串级PID控制仿真
·
四旋翼无人机三轴位置 + 偏航角的串级PID控制仿真
运行结果
三维轨迹图: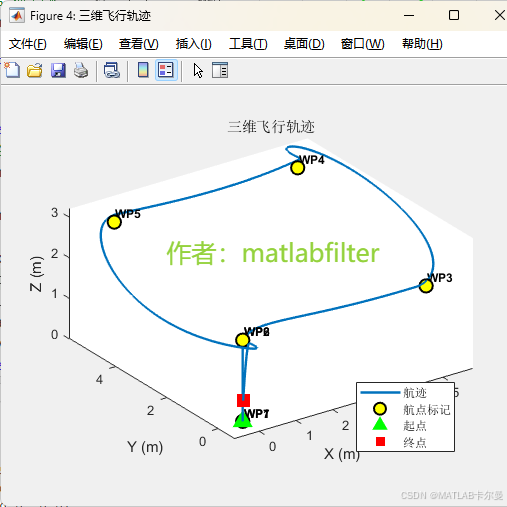
位置跟踪曲线: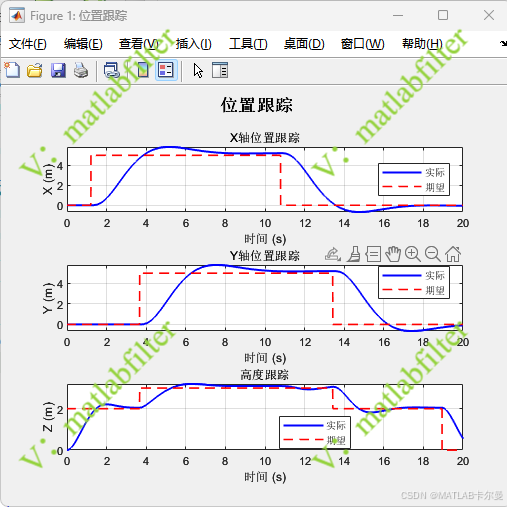
姿态曲线: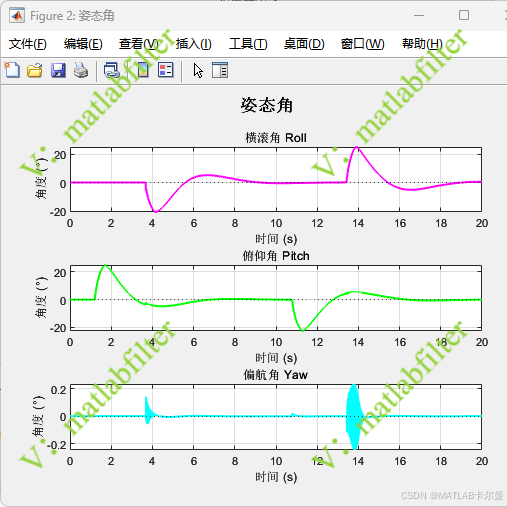
其他结果: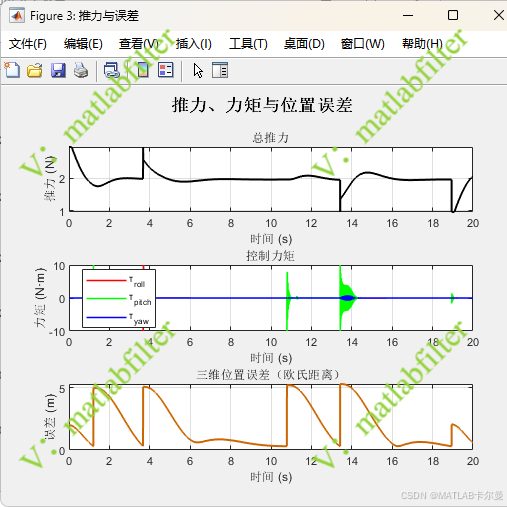
命令行截图: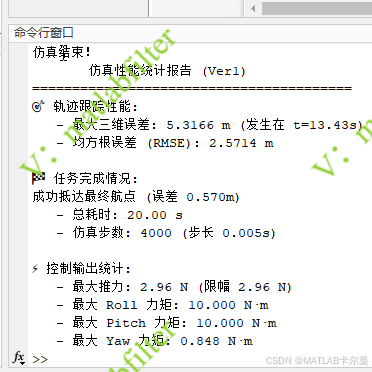
程序详解
代码概览
- 项目名称:无人机PID控制巡航仿真(单文件版)
- 核心功能:实现四旋翼无人机在三维空间内的自动起飞、航点巡航及降落。
- 控制架构:采用经典的串级PID控制(Cascaded PID) 结构。
- 外环(位置环):根据目标位置与当前位置的误差,计算出期望的加速度,进而解算出期望的姿态角(滚转、俯仰)和总推力。
- 内环(姿态环):根据期望姿态与实际姿态的误差,计算出控制力矩,驱动无人机调整姿态。
- 动力学模型:内置了完整的六自由度(6-DOF)刚体动力学模型,考虑了重力、空气阻尼(线速度与角速度阻尼)以及欧拉角运动学耦合。
主要功能模块详解
- 仿真参数与物理模型
- 时间设置:仿真步长
dt = 0.005s(200Hz),总时长 20秒。 - 物理参数:定义了无人机的质量(0.2kg)、转动惯量( I x x , I y y , I z z I_{xx}, I_{yy}, I_{zz} Ixx,Iyy,Izz)以及线性/角速度阻尼系数,模拟真实物理环境。
- 航点规划:预设了7个关键航点(WP1-WP7),包含垂直起飞、水平移动、爬升、返航及降落动作。
-
控制逻辑流程
代码在主循环中按以下步骤实时计算: -
航点管理:检测当前无人机位置与目标航点的距离,若小于阈值(0.3m)则自动切换至下一个航点。
-
外环解算(位置→姿态):
- 利用位置PID计算期望加速度。
- 通过几何关系将期望加速度映射为期望的滚转角(Roll)、俯仰角(Pitch)和总推力(Thrust)。
- 包含加速度限幅和姿态角限幅(最大倾斜30度),确保飞行安全。
-
内环解算(姿态→力矩):
- 利用姿态PID计算所需的控制力矩( τ r o l l , τ p i t c h , τ y a w \tau_{roll}, \tau_{pitch}, \tau_{yaw} τroll,τpitch,τyaw)。
- 包含积分抗饱和处理和输出限幅。
-
动力学积分:
- 基于欧拉法更新速度、位置、角速度和欧拉角。
- 处理了坐标系转换(机体系到世界系)和陀螺效应( ω × I ω \omega \times I\omega ω×Iω)。
-
辅助函数库
代码底部封装了多个核心函数,使主逻辑清晰简洁:
pid_init/pid_update:标准化的PID控制器实现,包含积分限幅和微分计算。drone_dynamics:核心物理引擎,解算牛顿 - 欧拉方程。clamp/angle_wrap:数值限幅与角度归一化(处理 ± π \pm \pi ±π 跳变)工具。plot_results/plot_3d_trajectory:可视化模块,自动生成位置跟踪曲线、姿态响应图、控制量曲线以及三维飞行轨迹动画数据。
输出与可视化
运行结束后,代码将生成三个主要图表窗口:
- 位置跟踪图:展示X、Y、Z三轴的实际位置与期望轨迹的对比,直观反映控制精度。
- 姿态角响应图:展示飞行过程中的滚转、俯仰和偏航角变化,验证姿态稳定性。
- 控制量与误差图:显示总推力、三轴力矩输出以及三维空间的位置误差收敛情况。
- 三维轨迹图:在3D空间中绘制飞行路径、航点标记、起点和终点,提供直观的飞行效果预览。
适用场景
- 教学演示:适合用于自动控制原理课程中,讲解串级控制、PID参数整定及飞行器动力学。
- 算法验证:作为基础基准(Baseline),用于测试新的控制算法或轨迹规划策略。
- 快速原型:无需配置Simulink模型,单文件即可运行,便于快速修改参数进行实验。
MATLAB代码与界面
部分代码如下: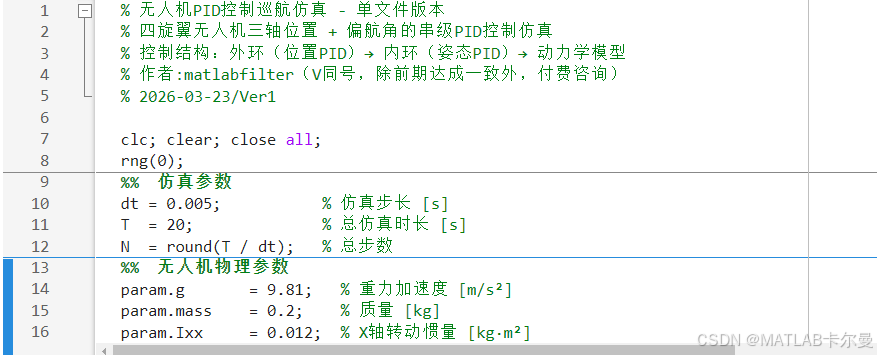
完整代码 完整代码 完整代码:如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 18
18 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)