悬架路面仿真模型 模型中有随机路面和减速带路面两类。 随机路面模型包括单轮激励模型,左右轮激励...
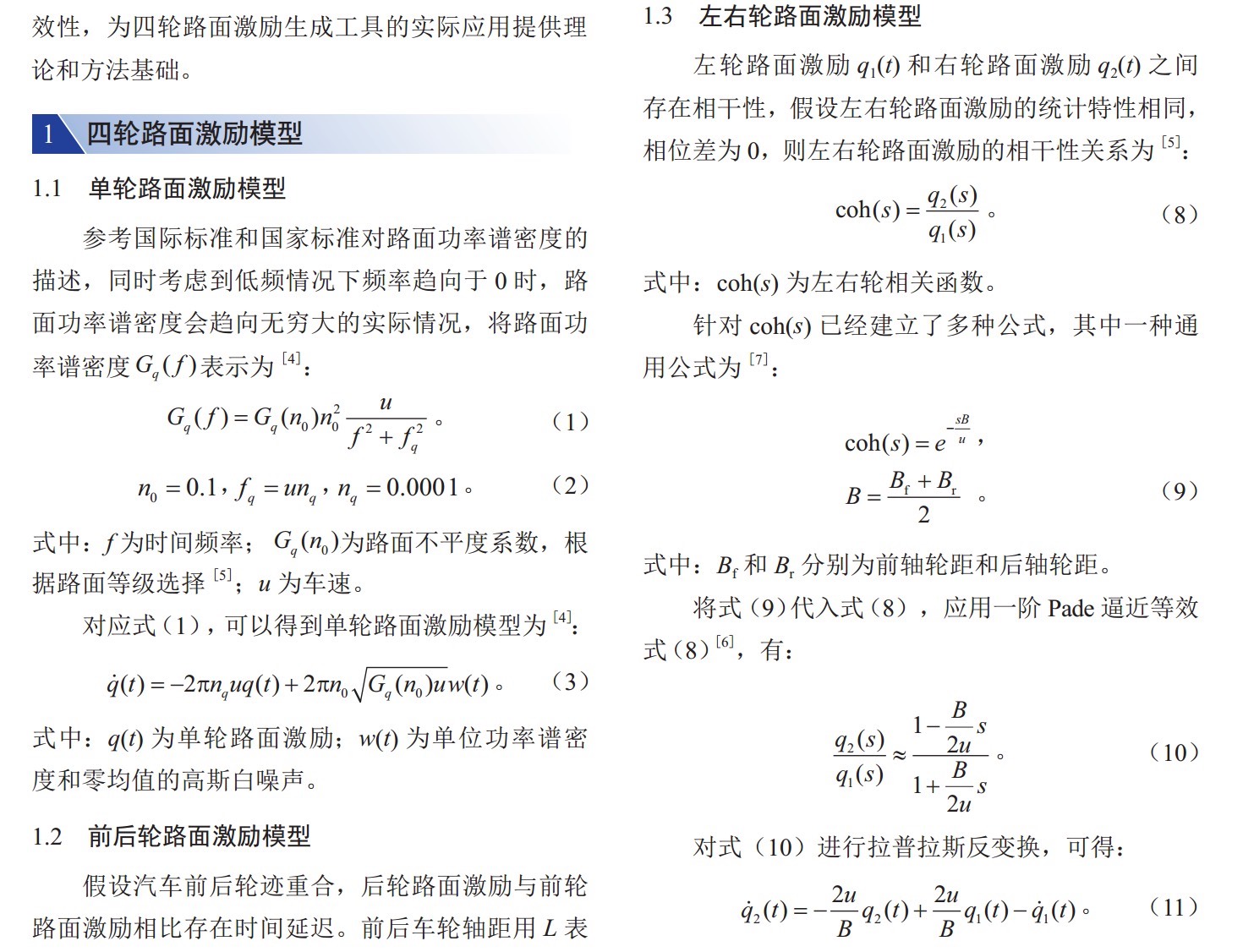
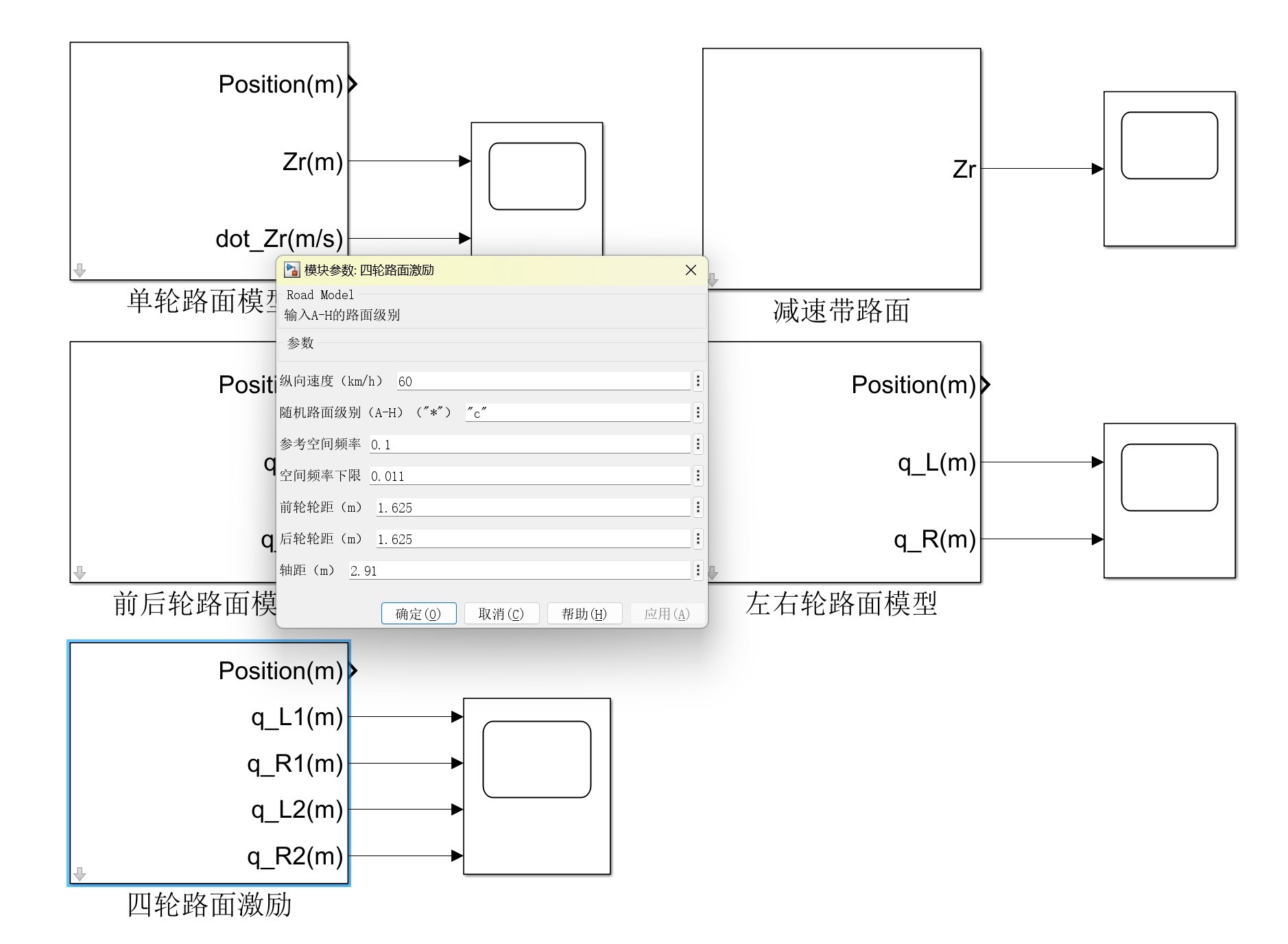
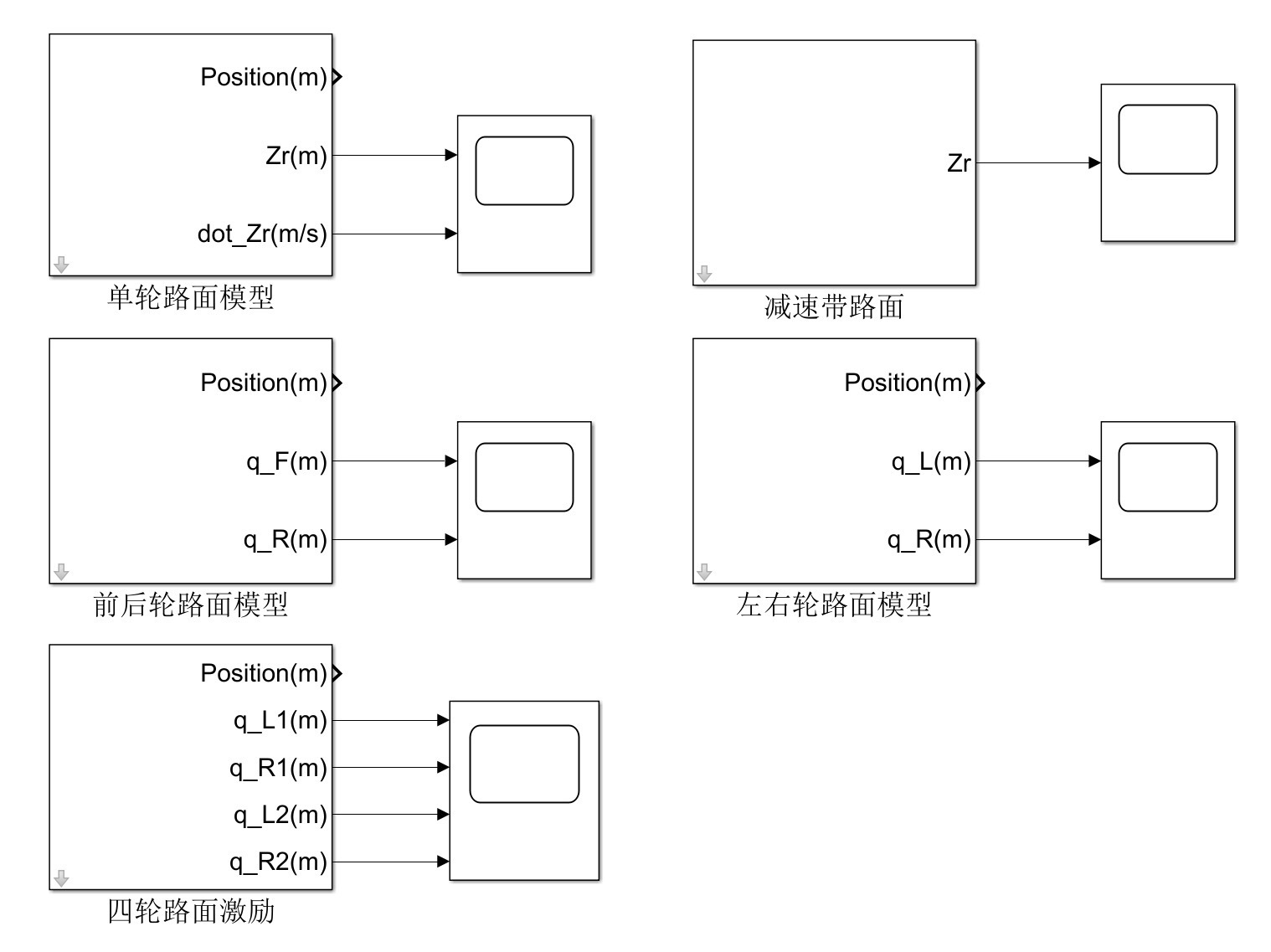
悬架路面仿真模型 模型中有随机路面和减速带路面两类。 随机路面模型包括单轮激励模型,左右轮激励模型,前后轮激励模型,四轮激励模型。 随机路面基于白噪声法建立,多轮随机路面模型考虑左右轮之间的相干特性,前后轮之间的时延特性。 通过Simulink搭建,已封装好,直接修改模型参数如路面等级,轴距,轮距,空间频率等,即可转化成对应的随机路面。 资料中有matlab代码,simulink模型和介绍资料(自制),资料包括详细的建模过程和对应的论文。
汽车悬架系统开发过程中最头疼的就是实车路试成本太高,这时候路面仿真模型就成了救命稻草。最近在项目里折腾的这套仿真模型挺有意思,尤其是它把各种典型路况都模块化了,今天就跟大家唠唠这玩意儿到底怎么玩。
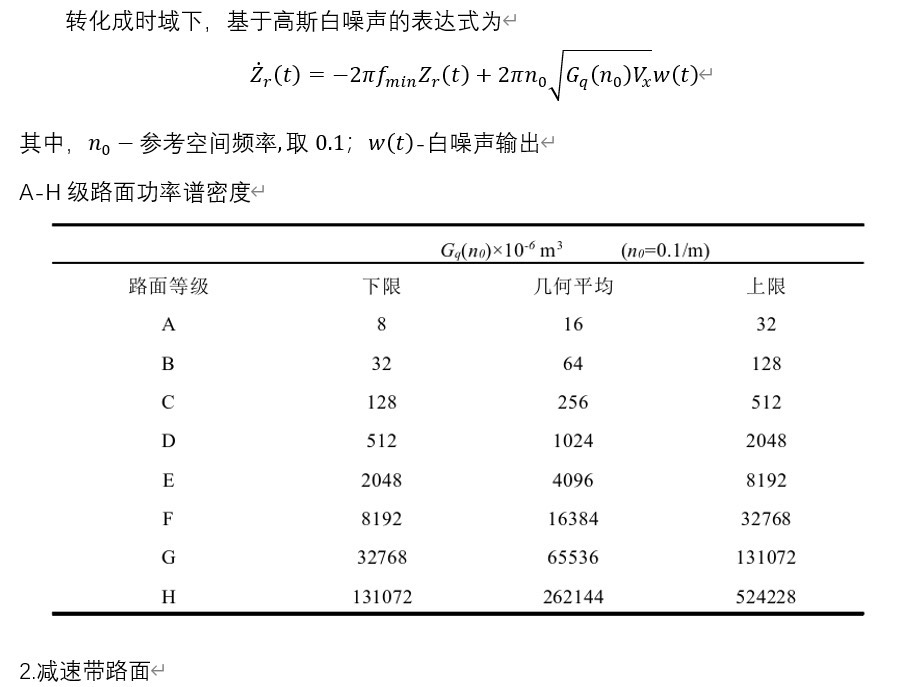
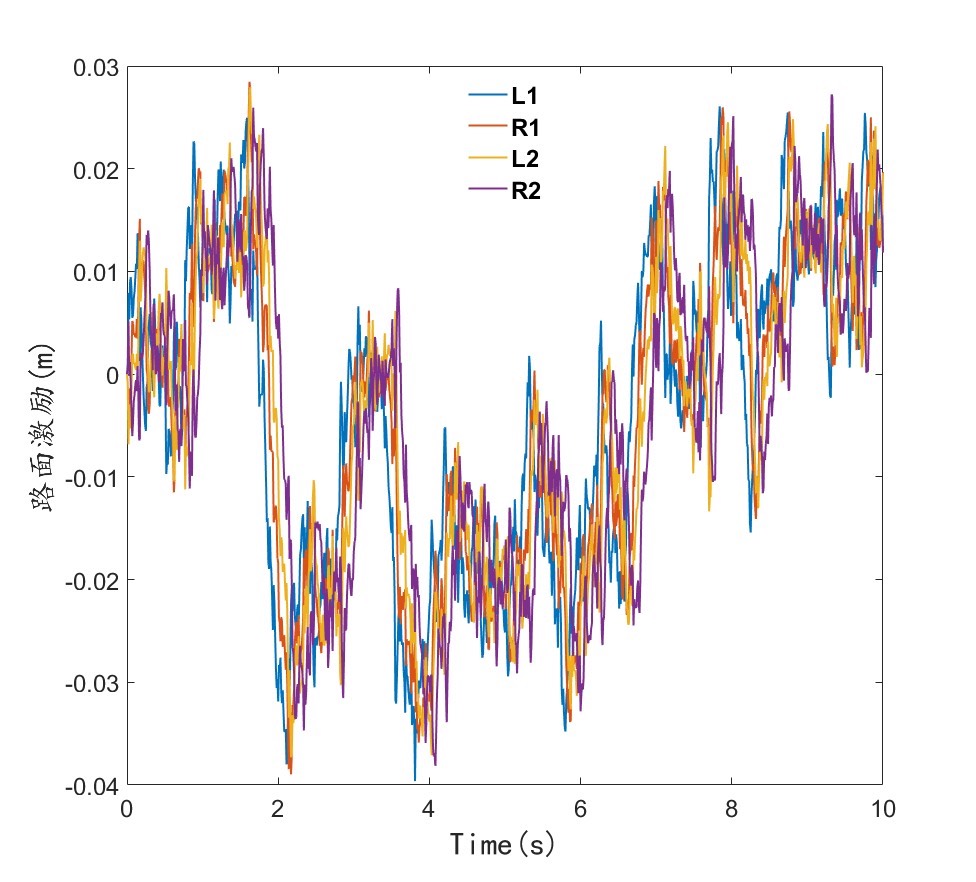
随机路面生成这块核心是用白噪声搞事情,但绝对不是你想象中直接甩个randn函数那么简单。特别是处理四轮关系时,左右轮得考虑相干性——就像现实里左边轮胎压过石子时右边轮胎其实也在经历类似震动。看这段核心代码就明白了:
% 左右轮相干处理
Gq = K * (1/(road_freq)).^road_class;
S = sqrt(Gq) * sqrt(2*pi*road_freq*v);
phi = 2*pi*rand(size(road_freq));
noise_left = S .* exp(1i*phi);
noise_right = S .* exp(1i*(phi + 2*pi*coherence*road_freq));这里用复数相位偏移实现左右轮激励的相关性,road_class参数控制着路面等级,改个数值就能在柏油马路和碎石路之间无缝切换。实际跑仿真时会发现,当coherence参数设为0.8左右,左右轮振动波形就像孪生兄弟——既相似又保持个性差异。
前后轮处理更带感,直接上时移大法。轴距参数往模型里一填,系统自动计算时间延迟。Simulink里直接拖个Transport Delay模块搞定:
(想象这里有个带黄色延迟图标的模块)
悬架路面仿真模型 模型中有随机路面和减速带路面两类。 随机路面模型包括单轮激励模型,左右轮激励模型,前后轮激励模型,四轮激励模型。 随机路面基于白噪声法建立,多轮随机路面模型考虑左右轮之间的相干特性,前后轮之间的时延特性。 通过Simulink搭建,已封装好,直接修改模型参数如路面等级,轴距,轮距,空间频率等,即可转化成对应的随机路面。 资料中有matlab代码,simulink模型和介绍资料(自制),资料包括详细的建模过程和对应的论文。
重点说下四轮耦合的情况,这可不是简单拼凑四个轮子的信号。当车速提到80km/h时,前轮激励传递到后轮的时间差必须精准到毫秒级,否则悬架响应相位会错乱。实测中发现轴距参数误差超过2cm,车身俯仰角度的仿真结果就会漂移5%以上。
减速带模型反而简单粗暴得多,直接在随机基底上叠加脉冲序列。但魔鬼在细节里——脉冲宽度要跟着车速动态调整。代码里这个车速换算公式特别实用:
speed_mps = 车速/3.6; % 转换km/h到m/s
pulse_width = 减速带宽度 / speed_mps; 比如15cm宽的减速带,40km/h车速下脉冲持续时间精确到13.5毫秒。在示波器上看波形时,这个时间精度直接决定悬架系统会不会产生二次震荡。
模型封装才是真正体现功力的地方,所有参数都做成了可视化面板。改个轮距参数就像在赛车游戏里调校车辆,立马看到轮迹变化。有次我把轮距从1550mm改成1650mm,仿真结果里车身侧倾角直接从3.2度降到2.7度,数据变化比实车测试还灵敏。
建议新手先玩转road_class这个参数,从A级路面(高速公路)到E级(越野路面)逐级体验。特别是切到E级时,把频谱分析仪打开,能看到0.1-10Hz区间能量暴涨20dB,这时候悬架系统的阻尼特性立马现原形。
这套模型的杀手锏是能混合路面——比如随机颠簸路上突然来个减速带阵列。记得保存仿真数据前调高求解器精度,不然脉冲触发时刻的微分方程容易炸。血的教训是某次没改设置,导致减速带冲击力仿真值比理论值高了30%,差点让结构组的同事白改三个月图纸。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 3
3 0
0- 0



 已为社区贡献31条内容
已为社区贡献31条内容

所有评论(0)