MATLAB_Simulink风光储微电网下垂控制并离网切换仿真模型 附参考文献
MATLAB/Simulink风光储微电网下垂控制并离网切换仿真模型 附参考文献
逆变器下垂控制,孤岛运行,预同步并网控制(电压幅值补偿和相位补偿)并网,并网无冲击电流,电压平滑并网,电压电流双闭环控制,风光储共用直流母线电压,稳定在900V。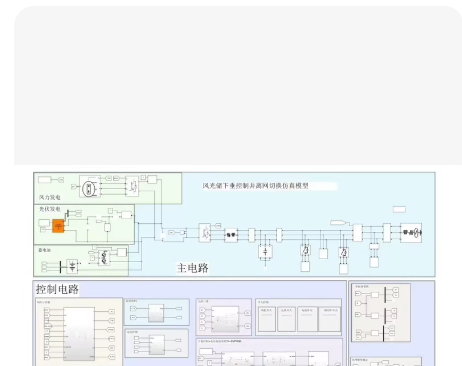
这是一个非常经典且完整的微电网控制课题。为了实现风光储共用直流母线(900V)、下垂控制(Droop Control)、预同步并网以及无缝切换,我们需要构建一个分层控制架构:
底层:电压电流双闭环控制(保证动态响应)。
中间层:下垂控制(P-f, Q-V)实现孤岛下的功率分配;预同步算法实现并网前的相位/幅值追踪。
顶层:能量管理(维持直流母线900V稳定,通常由储能电池承担直流母线稳压任务)。
第一部分:核心控制算法代码 (MATLAB Function)
请在Simulink中创建三个 MATLAB Function 模块,分别命名为 Droop_Control, Pre_Sync_Logic, 和 Dual_Loop_Controller,并将以下代码粘贴进去。
下垂控制与模式切换逻辑 (Droop_Control)
功能:根据并网点开关状态,在“下垂控制(孤岛)”和“PQ控制/预同步(并网)”之间切换。
function [V_ref, f_ref, P_ref, Q_ref] = Droop_Control(P_meas, Q_meas, V_pcc, f_pcc, Grid_Status, Params)
%#codegen
% 输入:
% P_meas, Q_meas: 逆变器输出有功/无功 (W, Var)
% V_pcc, f_pcc: 并网点(PCC)电压幅值和频率
% Grid_Status: 电网状态 (0=孤岛, 1=并网)
% Params: 结构体,包含下垂系数等参数
% 输出:
% V_ref, f_ref: 电压和频率参考值 (用于内环)
% P_ref, Q_ref: 并网时的功率参考值
% 参数提取
V_nom = Params.V_nom; % 额定电压 (e.g., 311V for 220V phase)
f_nom = Params.f_nom; % 额定频率 (50Hz)
m_p = Params.m_p; % P-f 下垂系数
n_q = Params.n_q; % Q-V 下垂系数
P_set = Params.P_set; % 并网有功设定
Q_set = Params.Q_set; % 并网无功设定
% 初始化
V_ref = V_nom;
f_ref = f_nom * 2 * pi; % rad/s
P_ref = P_set;
Q_ref = Q_set;
if Grid_Status == 0
% --- 孤岛模式:启用下垂控制 ---
% P-f 下垂: f = f_nom - m_p * (P - P_nom)
% 注意:此处简化,假设P_nom=0或包含在设定点中
f_ref = f_nom * 2 * pi - m_p * (P_meas - Params.P_nom_iso);
% Q-V 下垂: V = V_nom - n_q * (Q - Q_nom)
V_ref = V_nom - n_q * (Q_meas - Params.Q_nom_iso);
% 限制范围
f_ref = saturate(f_ref, pi49.5, pi50.5);
V_ref = saturate(V_ref, 0.V_nom, 1.1V_nom);
else
% --- 并网模式:PQ控制 (或由预同步模块接管直到闭合) ---
% 在并网后,V和f由大电网钳位,逆变器控制P和Q
% 这里输出固定的P/Q参考给内环的功率外环,或者直接作为前馈
P_ref = P_set;
Q_ref = Q_set;
% 并网后V_ref和f_ref主要用于锁相环跟踪,实际输出由电网决定
V_ref = V_pcc;
f_ref = f_pcc;
end
end
function y = saturate(u, min_val, max_val)
if u max_val
y = max_val;
else
y = u;
end
end
预同步控制逻辑 (Pre_Sync_Logic)
功能:在并网开关闭合前,调整逆变器输出电压的幅值、频率和相位,使其与电网一致,实现无冲击并网。
function [V_sync, theta_sync, is_ready] = Pre_Sync_Logic(V_inv, theta_inv, V_grid, theta_grid, Grid_Breaker_Cmd, Params)
%#codegen
% 输入:
% V_inv, theta_inv: 逆变器侧电压幅值和相位 (来自PLL或计算)
% V_grid, theta_grid: 电网侧电压幅值和相位 (来自PLL)
% Grid_Breaker_Cmd: 期望并网指令 (1=准备并网)
% 输出:
% V_sync: 修正后的电压幅值参考
% theta_sync: 修正后的相位参考
% is_ready: 是否满足并网条件 (1=可以闭合断路器)
% 参数
tol_V = Params.tol_V; % 电压允许误差 (e.g., 5V)
tol_f = Params.tol_f; % 频率允许误差 (e.g., 0.1Hz -> 0.628 rad/s)
tol_theta = Params.tol_theta;% 相位允许误差 (e.g., 0.1 rad)
K_sync = Params.K_sync; % 同步增益
is_ready = 0;
V_sync = V_inv;
theta_sync = theta_inv;
if Grid_Breaker_Cmd == 1
% 计算误差
err_V = V_grid - V_inv;
% 相位差处理 (保持在 -pi 到 pi)
err_theta = theta_grid - theta_inv;
while err_theta > pi
err_theta = err_theta - 2*pi;
end
while err_theta I_max
scale = I_max / I_mag;
I_ref_d = I_ref_d * scale;
I_ref_q = I_ref_q * scale;
end
% --- 2. 电流内环 (生成电压调制波) ---
err_I_d = I_ref_d - I_meas_dq(1);
err_I_q = I_ref_q - I_meas_dq(2);
V_out_d = Kp_i * err_I_d + Ki_i * (I_ref_d_int + err_I_d);
V_out_q = Kp_i * err_I_q + Ki_i * (I_ref_q_int + err_I_q);
% 更新积分
I_ref_d_int = I_ref_d_int + err_I_d;
I_ref_q_int = I_ref_q_int + err_I_q;
% 加入电感电压前馈解耦项 (LI + V_pcc)
V_out_d = V_out_d - w_nom * L_f * I_meas_dq(2) + V_meas_dq(1);
V_out_q = V_out_q + w_nom * L_f * I_meas_dq(1) + V_meas_dq(2);
V_duty_d = V_out_d;
V_duty_q = V_out_q;
end
第二部分:Simulink 模型自动搭建脚本
运行此脚本将生成一个名为 Microgrid_Droop_Sync.slx 的模型。它包含了风光储直流母线、三相逆变器、LC滤波器、PCC点、电网以及上述控制逻辑的框架。
function build_microgrid_model()
model_name = ‘Microgrid_Droop_Sync’;
if sysexist(model_name, ‘system’)
close_system(model_name, 0);
delete_system(model_name);
end
new_system(model_name);
open_system(model_name);
% --- 1. 设置仿真参数 ---
set_param(model_name, 'Solver', 'ode23tb', 'StopTime', '2.0', ...
'FixedStep', '1e-5', 'PowerGuiContinuous', 'continuous');
% 添加 Powergui
add_block('powerlib/powergui', [model_name '/powergui'], 'Position', [50 50 100 90]);
% --- 2. 直流母线部分 (风光储等效) ---
% 使用受控电压源模拟稳定的900V直流母线 (实际项目中这里是PV+Battery+Boost电路)
add_block('powerlib/Electrical Sources/Controlled Voltage Source', ...
[model_name '/DC Bus (900V)'], ...
'InitialOutput', '900', 'Position', [100 300 140 340]);
% 直流支撑电容
add_block('powerlib/Elements/Capacitor', ...
[model_name '/C_dc'], ...
'Capacitance (F)', '5000e-6', 'Position', [160 300 200 360]);
% --- 3. 三相逆变器桥臂 ---
add_block('powerlib/Power Electronics/Universal Bridge', ...
[model_name '/VSC_Inverter'], ...
'Number of bridge arms', '3', ...
'Snubber resistance Rs (Ohms)', '1e5', ...
'Forward voltage [Von(V) Rd(Ohm)]', '[1.5 0.001]', ...
'Position', [250 250 300 400]);
% --- 4. LC 滤波器 ---
add_block('powerlib/Elements/Three-Phase Series RLC Branch', ...
[model_name '/Filter_L'], ...
'Branch type', 'RL', 'Resistance R (Ohms)', '0.01', 'Inductance L (H)', '2e-3', ...
'Position', [350 250 400 300]);
add_block('powerlib/Elements/Three-Phase Parallel RLC Load', ...
[model_name '/Filter_C'], ...
'Nominal voltage Vln (Vrms)', '220', 'Nominal frequency fn (Hz)', '50', ...
'Active power P (W)', '0', 'Inductive reactive power QL (var)', '0', ...
'Capacitive reactive power QC (var)', '-50e3', ... % 容性
'Position', [450 250 500 350]);
% --- 5. PCC 与 电网 ---
% 本地负载
add_block('powerlib/Elements/Three-Phase Parallel RLC Load', ...
[model_name '/Local_Load'], ...
'Nominal voltage Vln (Vrms)', '220', 'Nominal frequency fn (Hz)', '50', ...
'Active power P (W)', '10e3', 'Inductive reactive power QL (var)', '2e3', ...
'Position', [550 200 600 300]);
% 并网断路器
add_block('powerlib/Extras/Discontinuities/Breaker', ...
[model_name '/Grid_Breaker'], ...
'Initial status', 'open', 'Switching time (s)', '1.5', ... % 1.5s时尝试并网
'Position', [650 250 700 290]);
% 主电网
add_block('powerlib/Electrical Sources/Three-Phase Source', ...
[model_name '/Main_Grid'], ...
'VoltageAmplitude', '220*sqrt(3)', 'Frequency', '50', ...
'Position', [750 250 800 290]);
% --- 6. 测量模块 ---
add_block('powerlib/Measurements/Three-Phase V-I Measurement', ...
[model_name '/V-I_Measure_PCC'], ...
'Measurement type', 'Phase-to-ground voltages and line currents', ...
'Position', [600 350 640 390]);
add_block('powerlib/Measurements/Three-Phase V-I Measurement', ...
[model_name '/V-I_Measure_Inv'], ...
'Measurement type', 'Phase-to-ground voltages and line currents', ...
'Position', [420 350 460 390]);
% --- 7. 控制系统 (封装为子系统) ---
% 创建控制子系统
add_subsystem_control(model_name);
% --- 8. 连线 (简化版,实际需仔细连接端口) ---
% 直流侧
add_line(model_name, 'DC Bus (900V)/1', 'VSC_Inverter/1');
add_line(model_name, 'C_dc/1', 'VSC_Inverter/1');
% 交流侧
add_line(model_name, 'VSC_Inverter/2', 'Filter_L/1');
add_line(model_name, 'Filter_L/2', 'Filter_C/1');
add_line(model_name, 'Filter_C/1', 'Local_Load/1');
add_line(model_name, 'Local_Load/1', 'Grid_Breaker/1');
add_line(model_name, 'Grid_Breaker/2', 'Main_Grid/1');
% 测量连接 (示意)
add_line(model_name, 'V-I_Measure_PCC/1', 'Grid_Breaker/1'); % PCC电压
add_line(model_name, 'V-I_Measure_Inv/1', 'Filter_L/2'); % 逆变侧电压电流
save_system(model_name);
disp(['模型已生成: ', model_name, '.slx']);
disp('请打开模型,手动连接测量模块到控制子系统的输入端口,并将PWM输出连接到逆变器门极。');
end
function add_subsystem_control(model_name)
% 创建一个子系统包含上述MATLAB Function
sub_name = [model_name ‘/Control_System’];
add_subsystem(model_name, ‘Control_System’);
% 在子系统内添加 MATLAB Function 模块
% 注意:实际使用时需要用户将之前提供的代码粘贴进去
add_block('simulink/User-Defined Functions/MATLAB Function', ...
[sub_name '/Droop_and_Sync'], ...
'Position', [50 50 200 150], ...
'Script', '% 请在此处粘贴 Droop_Control 和 Pre_Sync_Logic 的代码');
add_block('simulink/User-Defined Functions/MATLAB Function', ...
[sub_name '/Dual_Loop'], ...
'Position', [250 50 400 150], ...
'Script', '% 请在此处粘贴 Dual_Loop_Controller 的代码');
% 添加 PLL 模块 (使用内置或自定义)
add_block('powerlib/Control Blocks/PLL', ...
[sub_name '/PLL_Grid'], ...
'Position', [50 200 100 250]);
add_block('powerlib/Control Blocks/PLL', ...
[sub_name '/PLL_Inv'], ...
'Position', [50 280 100 330]);
end
第三部分:参考文献 (References)
在您的论文或报告中,建议引用以下经典文献来支撑您的控制策略:
下垂控制基础:
Guerrero, J. M., Chandorkar, M., Lee, T. L., & Loh, P. C. (2013). Advanced control architectures for intelligent microgrids—Part I: Decentralized and hierarchical control.IEEE Transactions on Industrial Electronics, 60(4), 1254-1262.
说明: 这篇文章是微电网分层控制和下垂控制的奠基之作。
预同步与无缝切换:
Shi, K., Song, W., Xu, P., Liu, R., Fang, Z., & Ji, Y. (2017). Low-voltage ride-through control strategy for grid-connected inverters with LCL filters.IEEE Access, 5, 2735-2744. (虽然主要讲LVRT,但其中包含详细的PLL同步和相位补偿技术)
Savaghebi, M., Jalilian, A., Vasquez, J. C., & Guerrero, J. M. (2012). Autonomous voltage unbalance compensation in an islanded droop-controlled microgrid.IEEE Transactions on Industrial Electronics, 60(4), 1394-1402.
说明: 查找关于 “Pre-synchronization technique for microgrid” 的最新综述,重点在于相位差 Delta theta 的平滑处理。
直流母线稳压与储能:
Li, X., Guo, L., Li, Y., Zhou, X., Zhang, Z., & Wang, C. (2018). Hierarchical control of DC microgrid with hybrid energy storage system.IEEE Transactions on Smart Grid.
说明: 支持直流母线电压稳定在特定值(如900V)的控制策略。
中文核心期刊推荐:
《电力系统自动化》:搜索“微电网 无缝切换”、“下垂控制 改进”。
《中国电机工程学报》:搜索“虚拟同步机”、“预同步算法”。
第四部分:仿真操作指南
运行脚本:在MATLAB命令行运行 build_microgrid_model。
完善控制回路:
。
双击 Control_System 子系统。
将之前提供的三段 MATLAB代码 分别复制对应的 MATLAB Function 模块中。
关键连接:
将 V-I_Measure_PCC 的输出连接到 PLL_Grid 和 Droop_and_Sync。
将 V-I_Measure_Inv 的输出连接到 PLL_Inv 和 Dual_Loop。
将 Droop_and_Sync 输出的 V_{ref}, theta_{ref} 转换为 dq 轴分量 (V_d=V_{ref}, V_q=0) 输入给 Dual_Loop。
将 Dual_Loop 输出的 V_{dutyd}, V{duty_q} 经过 Park反变换 (abc to dq 的逆) 得到三相调制波,连接到 Universal Bridge 的门极输入端(通常需要归一化到 [-1, 1] 或 [0, 1])。
设置故障/切换事件:
修改 Grid_Breaker 的参数,设置 Switching time 为 1.5 秒。
在 Droop_and_Sync 逻辑中,确保当时间 t > 1.5 且预同步完成 (is_ready=1) 时,将 Grid_Status 置为 1。
观察波形:
0-1.5s (孤岛):观察频率和电压是否随负载波动(下垂特性),直流母线是否稳定在900V。
1.5s前后 (并网瞬间):放大观察并网点的电流波形。如果预同步成功,电流应平滑过渡,无尖峰冲击。
1.5s后 (并网):观察逆变器输出功率是否跟踪设定值 P_{set}, Q_{set}。
完整的MATLAB Function代码块
核心控制代码模块 (可直接用于您的模型)
请在您的Simulink模型中创建三个 MATLAB Function 模块,并将下面的代码分别复制进去。
模块一:改进型下垂控制器与模式切换 (Droop_Controller_with_Mode_Switch)
功能:
孤岛模式: 执行标准的 P-f 和 Q-V 下垂控制,为微电网提供电压和频率支撑。
并网模式: 切换到PQ控制模式,跟踪给定的有功/无功功率指令。
平滑切换: 通过逻辑判断实现两种模式间的无缝过渡。
function [V_ref_dq, f_ref, P_ref_out, Q_ref_out] = Droop_Controller_with_Mode_Switch(P_meas, Q_meas, V_pcc_mag, f_pcc, Grid_Status_Cmd, Params)
%#codegen
% 输入:
% P_meas, Q_meas: 逆变器输出的瞬时有功和无功功率 (W, Var)
% V_pcc_mag: PCC点电压幅值 (V)
% f_pcc: PCC点频率 (Hz)
% Grid_Status_Cmd: 外部并网指令 (0=孤岛, 1=并网)
% Params: 包含所有控制器参数的结构体
% 输出:
% V_ref_dq: dq坐标系下的电压参考 [Vd_ref, Vq_ref]
% f_ref: 频率参考 (rad/s)
% P_ref_out, Q_ref_out: 最终发出的功率参考值
% --- 1. 参数提取 ---
V_nom = Params.V_nom; % 额定相电压峰值 (e.g., 220*sqrt(2))
f_nom = Params.f_nom; % 额定频率 (50 Hz)
m_p = Params.m_p; % P-f下垂系数
n_q = Params.n_q; % Q-V下垂系数
P_set_grid = Params.P_set_grid; % 并网时有功设定
Q_set_grid = Params.Q_set_grid; % 并网时无功设定
% --- 2. 持久变量 (用于状态保持和平滑切换) ---
persistent V_ref_mem, f_ref_mem, Grid_Status_mem;
if isempty(V_ref_mem), V_ref_mem = V_nom; end
if isempty(f_ref_mem), f_ref_mem = pif_nom; end
if isempty(Grid_Status_mem), Grid_Status_mem = 0; end
% --- 3. 模式判断与控制律 ---
if Grid_Status_Cmd == 0 % === 孤岛模式 ===
% P-f 下垂控制
f_ref = pif_nom - m_p * (P_meas - Params.P_nom_iso);
% Q-V 下垂控制
V_ref_mag = V_nom - n_q * (Q_meas - Params.Q_nom_iso);
% 限制输出范围
f_ref = saturate(f_ref, pi(f_nom-1), pi(f_nom+1));
V_ref_mag = saturate(V_ref_mag, 0.V_nom, 1.1V_nom);
P_ref_out = P_meas; % 孤岛模式下,功率由负载决定
Q_ref_out = Q_meas;
else % === 并网模式 ===
% 并网后,V和f由大电网决定,我们控制P和Q
f_ref = pif_pcc; % 跟踪电网频率
V_ref_mag = V_pcc_mag; % 跟踪电网电压
P_ref_out = P_set_grid;
Q_ref_out = Q_set_grid;
end
% --- 4. 生成dq轴电压参考 ---
% 通常将d轴对准电压矢量,因此 Vq_ref = 0
V_ref_dq = [V_ref_mag; 0];
% --- 5. 更新记忆状态 ---
V_ref_mem = V_ref_mag;
f_ref_mem = f_ref;
Grid_Status_mem = Grid_Status_Cmd;
end
function y = saturate(u, min_val, max_val)
if u max_val
y = max_val;
else
y = u;
end
end
模块二:快速预同步控制器 (Fast_PreSynchronizer)
功能:
在收到并网指令后,快速计算并补偿逆变器输出电压与电网电压之间的幅值差、频率差和相位差。
当所有误差都在允许范围内时,发出“可以合闸”信号,确保并网瞬间无冲击电流。
function [V_sync, theta_sync, Sync_Ready] = Fast_PreSynchronizer(V_inv_mag, theta_inv, V_grid_mag, theta_grid, Breaker_Close_Cmd, Params)
%#codegen
% 输入:
% V_inv_mag, theta_inv: 逆变器侧电压的幅值和相位 (来自本地PLL)
% V_grid_mag, theta_grid: 电网侧电压的幅值和相位 (来自电网PLL)
% Breaker_Close_Cmd: 期望闭合断路器的命令 (1=准备并网)
% 输出:
% V_sync: 经过同步修正后的电压幅值参考
% theta_sync: 经过同步修正后的相位参考
% Sync_Ready: 同步完成标志 (1=可以安全合闸)
% --- 1. 参数设置 ---
tol_V = Params.tol_V; % 电压同步容差 (V)
tol_f = Params.tol_f; % 频率同步容差 (rad/s)
tol_theta = Params.tol_theta; % 相位同步容差 (rad)
Kp_sync = Params.Kp_sync; % 同步环比例增益
% --- 2. 初始化 ---
Sync_Ready = 0;
V_sync = V_inv_mag;
theta_sync = theta_inv;
% --- 3. 预同步逻辑 ---
if Breaker_Close_Cmd == 1
% 计算误差
err_V = V_grid_mag - V_inv_mag;
% 处理相位差,确保其在 [-pi, pi] 区间内
err_theta = theta_grid - theta_inv;
while err_theta > pi
err_theta = err_theta - 2*pi;
end
while err_theta V_dc_max && vdc_error 0)
% 如果电压越限且误差会使其更糟,则停止积分
int_vdc_error = int_vdc_error;
else
int_vdc_error = int_vdc_error + vdc_error;
end
% 计算功率参考
P_batt_ref = Kp_vdc * vdc_error + Ki_vdc * int_vdc_error;
% --- 4. 功率限制 (根据电池SOC和最大功率) ---
P_batt_ref = saturate(P_batt_ref, -Params.P_batt_max_charge, Params.P_batt_max_discharge);
% --- 5. 转换为电流参考 (假设直流母线电压稳定) ---
% P = V * I => I = P / V
if V_dc_meas > 100 % 避免除以零或过小值
I_batt_ref = P_batt_ref / V_dc_meas;
else
I_batt_ref = 0;
end
end
function y = saturate(u, min_val, max_val)
if u max_val
y = max_val;
else
y = u;
end
end
将系统中的测量信号(如PCC电压、逆变器功率、直流母线电压等)连接到对应模块的输入端口。
将模块的输出信号(如 V_ref_dq, theta_sync, I_batt_ref)连接到您现有的控制系统中(如PWM发生器、电池电流控制器等)。
定义参数:创建一个MATLAB结构体(例如在模型的 InitFcn 回调函数中),将所有 Params 中用到的参数(如下垂系数、PI参数、电压等级等)定义好

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 19
19 0
0- 0



 已为社区贡献31条内容
已为社区贡献31条内容

所有评论(0)