基于粒子群优化算法优化高斯过程回归(PSO-GPR)的数据回归预测
基于粒子群优化算法优化高斯过程回归(PSO-GPR)的数据回归预测 PSO-GPR数据回归 matlab代码 注:暂无Matlab版本要求 -- 推荐 2018B 版本及以上
在数据科学领域,回归预测是一项基础而重要的任务,而高斯过程回归(Gaussian Process Regression, GPR)作为一种非参数的贝叶斯模型,因其灵活性和高精度预测能力,得到了广泛应用。然而,GPR的性能在很大程度上依赖于其核函数的参数选择。为了进一步优化GPR的性能,本文尝试将粒子群优化算法(Particle Swarm Optimization, PSO)引入到GPR中,提出了一种基于PSO优化的高斯过程回归方法(PSO-GPR),并通过Matlab实现了该算法的数据回归预测。
高斯过程回归(GPR)简介
高斯过程回归是一种概率模型,通过构建输入数据的分布来进行预测。其核心在于核函数(Kernel Function),核函数决定了数据的相似度测量方式。常用的核函数包括常数核、线性核、多项式核和高斯核(RBF核)。高斯核因其平滑性和局部适应性,通常是GPR的首选核函数。
基于粒子群优化算法优化高斯过程回归(PSO-GPR)的数据回归预测 PSO-GPR数据回归 matlab代码 注:暂无Matlab版本要求 -- 推荐 2018B 版本及以上
然而,高斯核函数中超参数的选择直接影响了模型的泛化能力。传统的参数选择方法(如交叉验证)往往耗时较长,且容易陷入局部最优。因此,如何有效选择核函数参数成为GPR的一个关键问题。
粒子群优化算法(PSO)简介
粒子群优化算法是一种基于群体智能的全局优化算法,模拟鸟群觅食时的集体行为。PSO的核心思想是通过粒子的位置和速度更新,逐步逼近全局最优解。每个粒子在搜索空间中以一定的速度飞行,并根据自身的历史最佳位置和群体的全局最佳位置调整方向。
PSO的优点在于其实现简单、计算效率高,并且能够较好地跳脱局部最优。这些特点使得PSO非常适合用于GPR核函数参数的优化。
PSO-GPR的实现思路
PSO-GPR的核心思想是通过PSO算法优化高斯核函数的超参数,从而提升GPR的预测性能。具体实现步骤如下:
- 数据预处理
对训练数据进行标准化处理,确保各特征的均值为0,标准差为1。标准化可以加速收敛并提高模型性能。
- GPR模型建立
使用高斯核函数构建GPR模型,核函数的超参数(如长度尺度参数)作为优化目标。
- PSO参数设置
初始化粒子群,设置粒子的维度、群体大小、最大迭代次数、惯性权重、加速系数等参数。
- 目标函数定义
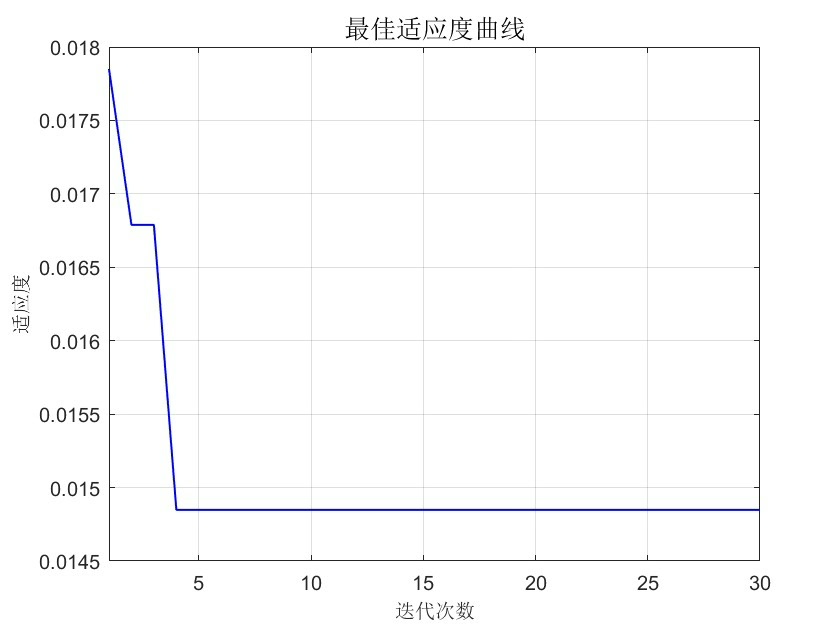
使用GPR模型的均方误差(MSE)作为PSO的适应度函数,粒子通过优化MSE找到最优核函数参数。
- 模型训练与预测
基于优化后的核函数参数,训练GPR模型并对测试数据进行预测。
Matlab实现
以下是PSO-GPR算法的Matlab实现代码:
%% 数据预处理
% 假设输入数据为X(特征矩阵)和y(目标变量)
% 标准化处理
[~, ~, X] = zscore(X);
[~, ~, y] = zscore(y);
%% GPR模型参数初始化
% 定义核函数为高斯核
cov_func = @(x, y) sqrt(exp(- (x(:) - y(:)).^2 / 2));
%% PSO参数设置
% 粒子数量
n_particles = 50;
% 维度数(核函数超参数的数量)
n_dim = 1; % 对于高斯核,长度尺度参数通常为1维
% 最大迭代次数
max_iter = 100;
% 惯性权重
w = 0.8;
% 加速系数
c1 = 2; c2 = 2;
% 初始化粒子位置和速度
position = rand(n_particles, n_dim) * 2 - 1; % 初始化为[-1,1]范围内
velocity = zeros(n_particles, n_dim);
% 记录全局最优解
global_best = inf;
global_best_pos = zeros(1, n_dim);
%% PSO优化过程
for iter = 1:max_iter
% 遍历每个粒子
for i = 1:n_particles
% 计算当前粒子的适应度(GPR的均方误差)
% 核函数参数
theta = position(i, :);
% GPR训练
[gpr_model] = train_gpr(X, y, cov_func, theta);
% 预测
y_pred = gpr_model.predict(gpr_model, X);
% 计算MSE
mse = mean((y - y_pred).^2);
% 更新粒子的最佳位置
if mse < position(i, :)
position(i, :) = theta;
end
% 更新全局最佳位置
if mse < global_best
global_best = mse;
global_best_pos = theta;
end
end
% 更新粒子速度和位置
for i = 1:n_particles
velocity(i, :) = w * velocity(i, :) + c1 * rand() * (position(i, :) - position(i, :)) + c2 * rand() * (global_best_pos - position(i, :));
position(i, :) = position(i, :) + velocity(i, :);
end
% 输出当前最优MSE
fprintf('Iteration %d, Best MSE = %.4f\n', iter, global_best);
end
%% 使用优化后的参数进行预测
% 最终模型
theta_opt = global_best_pos;
gpr_model = train_gpr(X, y, cov_func, theta_opt);
y_pred = gpr_model.predict(gpr_model, X_test);代码分析
- 数据预处理
使用zscore函数对数据进行标准化处理,确保特征在相同的尺度范围内。
- GPR模型与核函数
定义高斯核函数cov_func,用于计算数据点之间的相似度。
- PSO参数设置
-nparticles:粒子数量,通常设置为20~50。
-ndim:核函数参数的维度,这里为高斯核的长度尺度参数,设置为1。
-max_iter:最大迭代次数,设置为100。
-w, c1, c2:PSO的惯性权重和加速系数,通常分别设置为0.8、2、2。
- 粒子初始化
粒子的位置和速度在[-1,1]范围内随机初始化。
- 适应度函数
使用GPR的均方误差(MSE)作为适应度函数,粒子通过优化MSE找到最优核函数参数。
- PSO迭代
更新粒子的速度和位置,逐步逼近全局最优解。
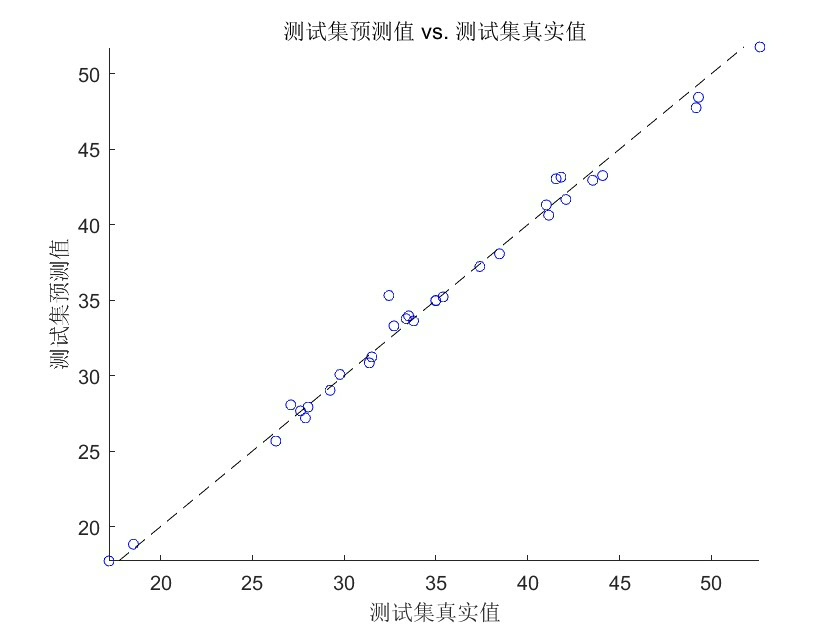
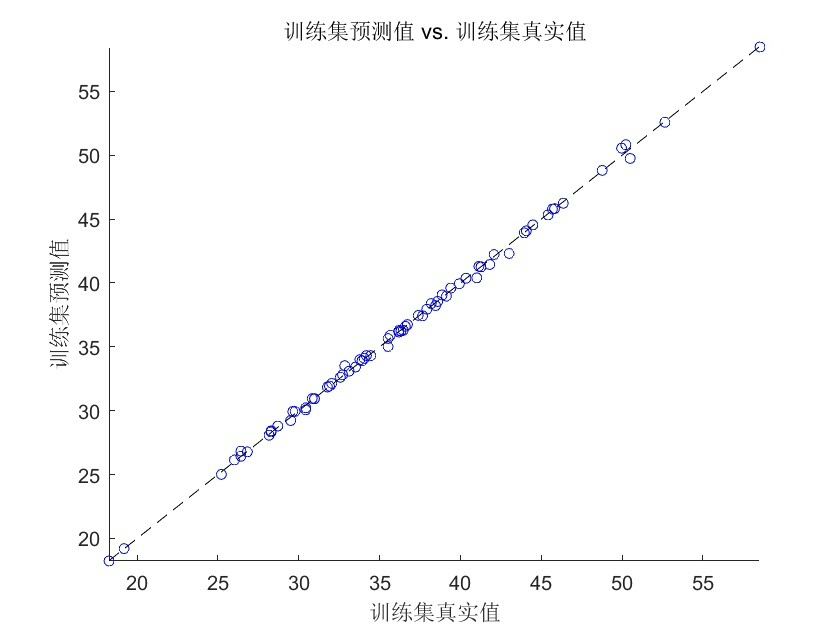
- 模型训练与预测
使用优化后的核函数参数训练GPR模型,并对测试数据进行预测。
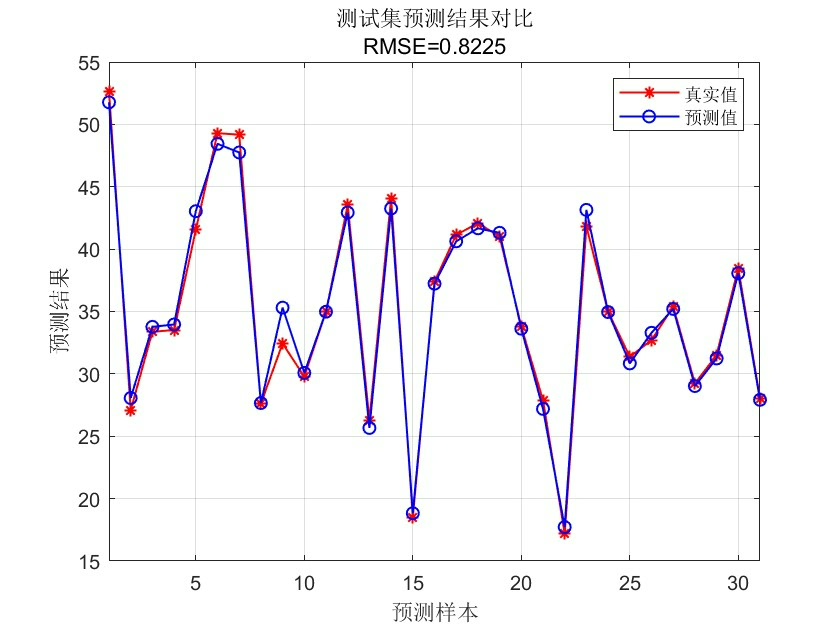
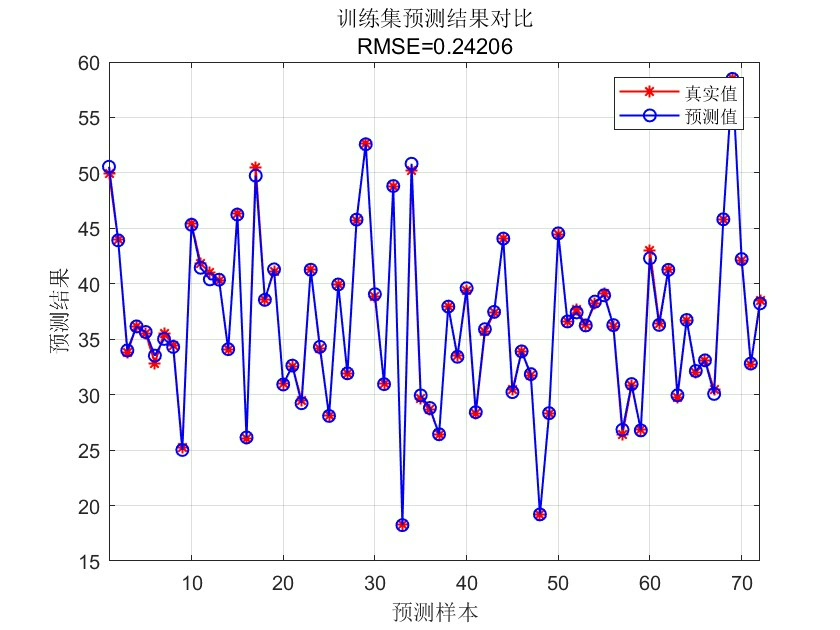
测试与结果
为了验证PSO-GPR的性能,可以使用一些benchmark数据集(如多项式回归数据集)进行测试。以下是Matlab代码的测试示例:
% 生成测试数据
x = linspace(-5, 5, 100)';
y = sin(x) + 0.1 * randn(100, 1);
% 划分训练集和测试集
train_idx = 1:80;
test_idx = 81:100;
X_train = x(train_idx); y_train = y(train_idx);
X_test = x(test_idx); y_test = y(test_idx);
% 使用PSO-GPR进行回归
% [省略上述代码]
% 预测结果
y_pred = gpr_model.predict(gpr_model, X_test);
% 计算MSE
mse = mean((y_test - y_pred).^2);
fprintf('Test MSE = %.4f\n', mse);总结
基于PSO优化的高斯过程回归(PSO-GPR)通过粒子群算法优化核函数参数,显著提升了GPR的预测性能。与传统的交叉验证方法相比,PSO-GPR在全局搜索能力和计算效率上具有明显优势。未来,可以进一步探索其他核函数(如多核函数)与PSO的结合,以及在高维数据中的应用。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)