粒子群优化算法实现MPC参数自动调节:为模型预测控制解锁新技能
a. 最新:粒子群优化算法实现MPC(模型预测控制)参数自动调节: b. 代码模型说明:针对手动调节MPC参数困难、难以找到参数最优值的问题,首先建立了MPC轨迹跟踪控制效果的评价指标,用以描述模型仿真结果的优劣,其次编写了粒子群优化代码对simulink模型中MPC参数(Np,Nc,预测时域,控制时域)进行自动调节。 可设置MPC参数Np,Nc的调节范围,进行最优参数寻优。 c. 代码包含: i. 基于MPC的轨迹跟踪simulink模型:模型包含MPC轨迹跟踪控制器、控制对象,评价指标模块,误差计算模块; ii. 粒子群代码.m文件:代码可设置MPC参数Np,Nc的调节范围,进行最优参数寻优。 iii. 轨迹曲线对比与误差分析代码,可在仿真之后分析轨迹跟踪的误差曲线,误差最大值,误差均方根值; iv. CarSim cpar文件; d. 代码注释详细,录制了运行步骤视频,支持有偿。 e. 非常利于学习:simulink模型与.m文件的关系互联,如何实现多参数自动调节(省时省力找到最优)等 f.接nmpc,mpc,车辆运动学,车辆动力学,轨迹跟踪,mpc参数寻优定制 g.carsim2020,matlab2019b及以下
在控制领域,手动调节MPC(模型预测控制)参数一直是个令人头疼的问题。想找到参数最优值,那难度不亚于大海捞针。不过,现在有了新办法——利用粒子群优化算法实现MPC参数自动调节,简直是控制界的福音!
代码模型说明
为了解决手动调节的困境,咱得先建立MPC轨迹跟踪控制效果的评价指标。这就好比给模型仿真结果设定一个打分机制,用来判断它到底表现得好不好。
a. 最新:粒子群优化算法实现MPC(模型预测控制)参数自动调节: b. 代码模型说明:针对手动调节MPC参数困难、难以找到参数最优值的问题,首先建立了MPC轨迹跟踪控制效果的评价指标,用以描述模型仿真结果的优劣,其次编写了粒子群优化代码对simulink模型中MPC参数(Np,Nc,预测时域,控制时域)进行自动调节。 可设置MPC参数Np,Nc的调节范围,进行最优参数寻优。 c. 代码包含: i. 基于MPC的轨迹跟踪simulink模型:模型包含MPC轨迹跟踪控制器、控制对象,评价指标模块,误差计算模块; ii. 粒子群代码.m文件:代码可设置MPC参数Np,Nc的调节范围,进行最优参数寻优。 iii. 轨迹曲线对比与误差分析代码,可在仿真之后分析轨迹跟踪的误差曲线,误差最大值,误差均方根值; iv. CarSim cpar文件; d. 代码注释详细,录制了运行步骤视频,支持有偿。 e. 非常利于学习:simulink模型与.m文件的关系互联,如何实现多参数自动调节(省时省力找到最优)等 f.接nmpc,mpc,车辆运动学,车辆动力学,轨迹跟踪,mpc参数寻优定制 g.carsim2020,matlab2019b及以下
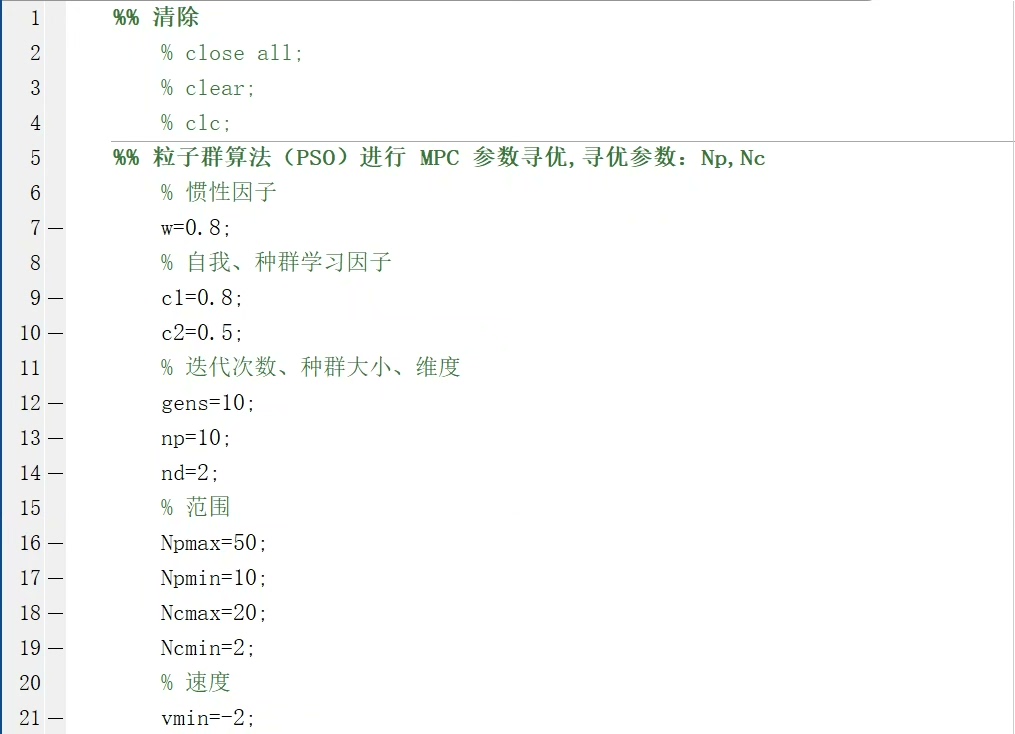
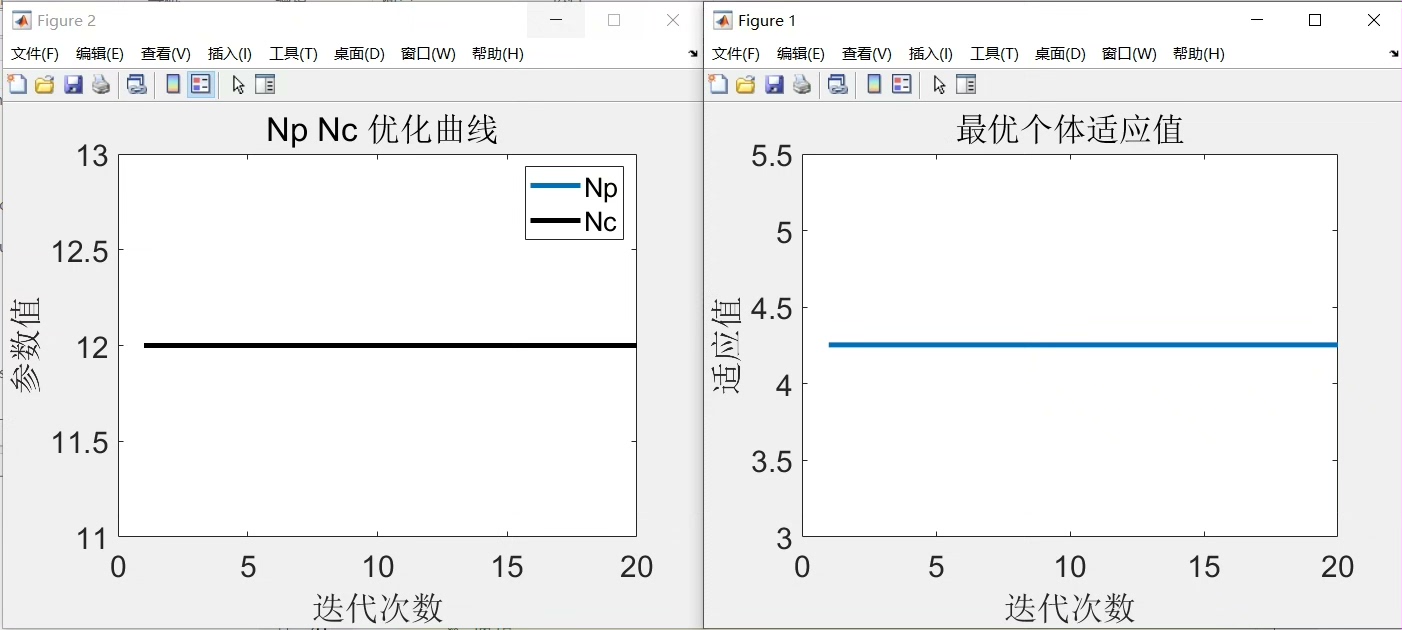
有了评价指标,接下来就是编写粒子群优化代码,对simulink模型中的MPC参数(Np、Nc,也就是预测时域和控制时域)进行自动调节。咱还能设置Np、Nc的调节范围,就像给参数寻优设定一个“搜索圈”,在这个范围内去找最优参数。
详细代码解析
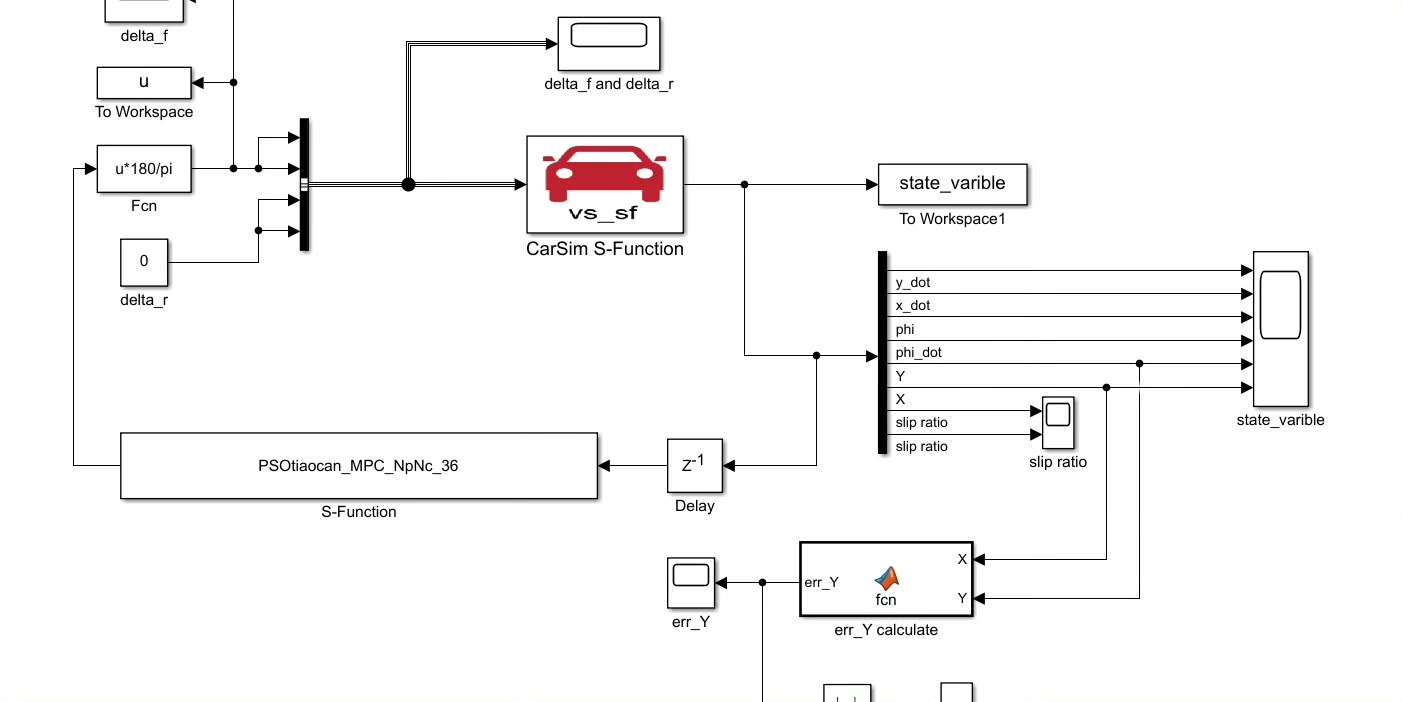
基于MPC的轨迹跟踪simulink模型
这个模型可说是整个系统的核心之一。它包含了MPC轨迹跟踪控制器、控制对象、评价指标模块以及误差计算模块。MPC轨迹跟踪控制器负责根据模型预测来调整控制策略,就像司机根据导航来调整行驶方向。控制对象就是我们要控制的目标,比如一辆车。评价指标模块根据设定的评价标准给模型的表现打分,误差计算模块则计算实际轨迹与期望轨迹之间的误差。
粒子群代码.m文件
% 粒子群优化算法主程序
% 设置MPC参数Np,Nc的调节范围
Np_min = 5;
Np_max = 20;
Nc_min = 3;
Nc_max = 10;
% 初始化粒子群参数
num_particles = 50; % 粒子数量
num_iterations = 100; % 迭代次数
w = 0.7; % 惯性权重
c1 = 1.5; % 加速常数1
c2 = 1.5; % 加速常数2
% 初始化粒子位置和速度
particles = zeros(num_particles, 2);
particles(:, 1) = Np_min + (Np_max - Np_min) * rand(num_particles, 1);
particles(:, 2) = Nc_min + (Nc_max - Nc_min) * rand(num_particles, 1);
velocities = zeros(num_particles, 2);
% 初始化个体最优和全局最优
pbest = particles;
pbest_fitness = inf(num_particles, 1);
gbest = particles(1, :);
gbest_fitness = inf;
for i = 1:num_iterations
for j = 1:num_particles
% 设置当前粒子对应的MPC参数
Np = particles(j, 1);
Nc = particles(j, 2);
% 调用simulink模型并获取评价指标值(这里假设评价指标值为fitness)
fitness = call_simulink_model(Np, Nc);
if fitness < pbest_fitness(j)
pbest_fitness(j) = fitness;
pbest(j, :) = particles(j, :);
end
if fitness < gbest_fitness
gbest_fitness = fitness;
gbest = particles(j, :);
end
end
% 更新速度和位置
for j = 1:num_particles
r1 = rand(1, 2);
r2 = rand(1, 2);
velocities(j, :) = w * velocities(j, :) + c1 * r1.* (pbest(j, :) - particles(j, :)) + c2 * r2.* (gbest - particles(j, :));
particles(j, :) = particles(j, :) + velocities(j, :);
% 边界处理
particles(j, 1) = max(Np_min, min(Np_max, particles(j, 1)));
particles(j, 2) = max(Nc_min, min(Nc_max, particles(j, 2)));
end
end这段代码实现了粒子群优化算法。首先设定了MPC参数Np和Nc的调节范围,然后初始化粒子群的各种参数,包括粒子数量、迭代次数、惯性权重以及加速常数。接着初始化粒子的位置和速度,并设定个体最优和全局最优。在每次迭代中,根据当前粒子的位置设置MPC参数,调用simulink模型获取评价指标值,更新个体最优和全局最优。最后根据公式更新粒子的速度和位置,并进行边界处理,确保参数在设定范围内。
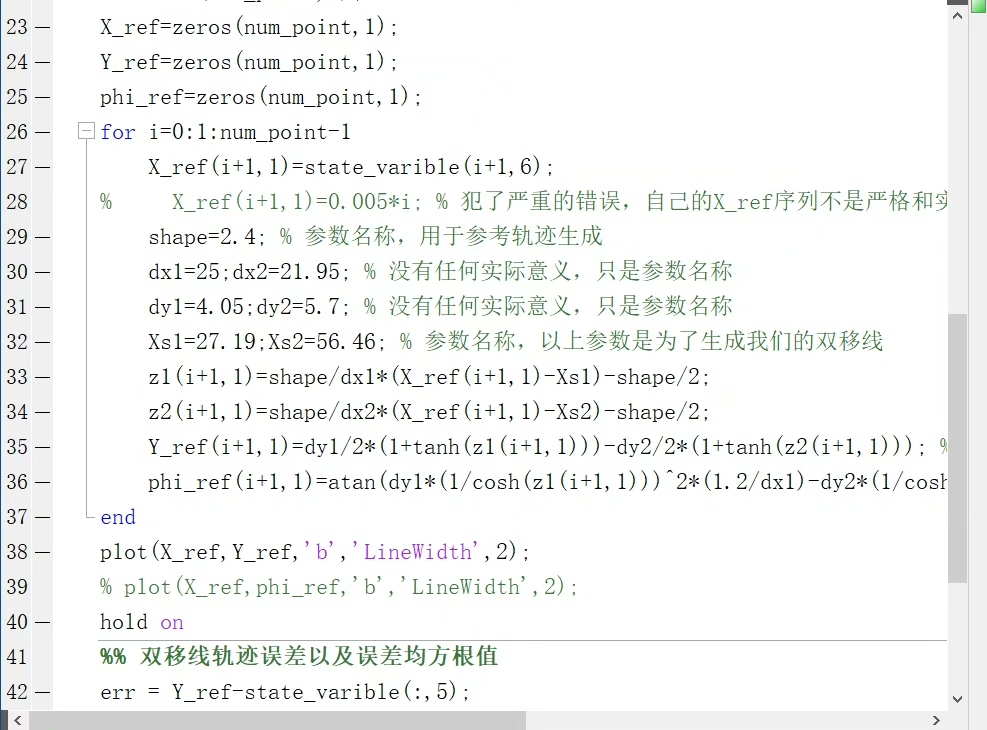
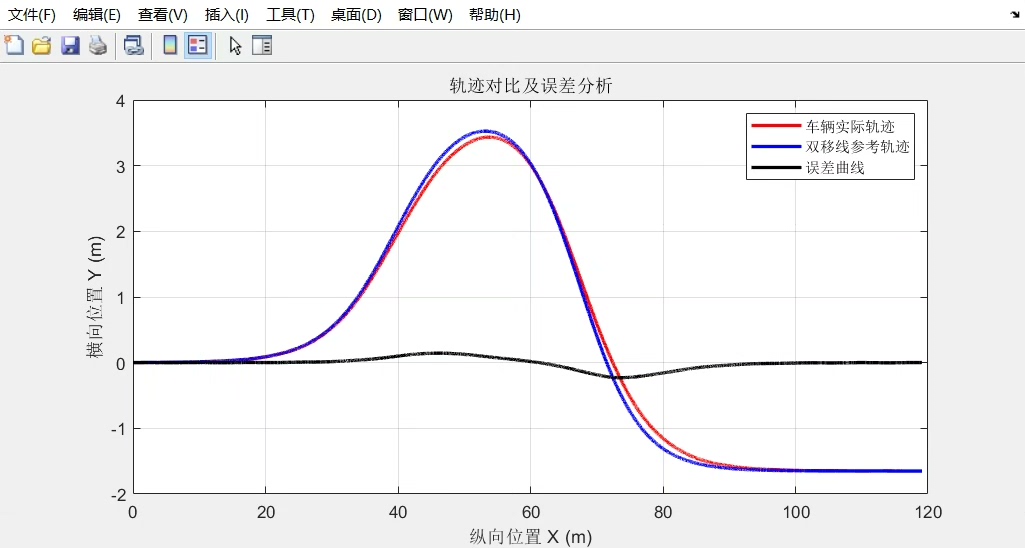
轨迹曲线对比与误差分析代码
仿真之后,我们需要分析轨迹跟踪的误差曲线、误差最大值以及误差均方根值。
% 假设已经获取到实际轨迹和期望轨迹的数据
actual_trajectory = load('actual_trajectory.mat');
desired_trajectory = load('desired_trajectory.mat');
% 计算误差
error = actual_trajectory - desired_trajectory;
% 计算误差最大值
max_error = max(abs(error));
% 计算误差均方根值
rmse_error = sqrt(mean(error.^2));
% 绘制误差曲线
figure;
plot(error);
xlabel('时间步');
ylabel('误差');
title('轨迹跟踪误差曲线');这段代码先加载实际轨迹和期望轨迹的数据,然后计算误差。通过max函数找到误差最大值,利用sqrt和mean函数计算误差均方根值。最后绘制误差曲线,直观展示误差随时间步的变化情况。
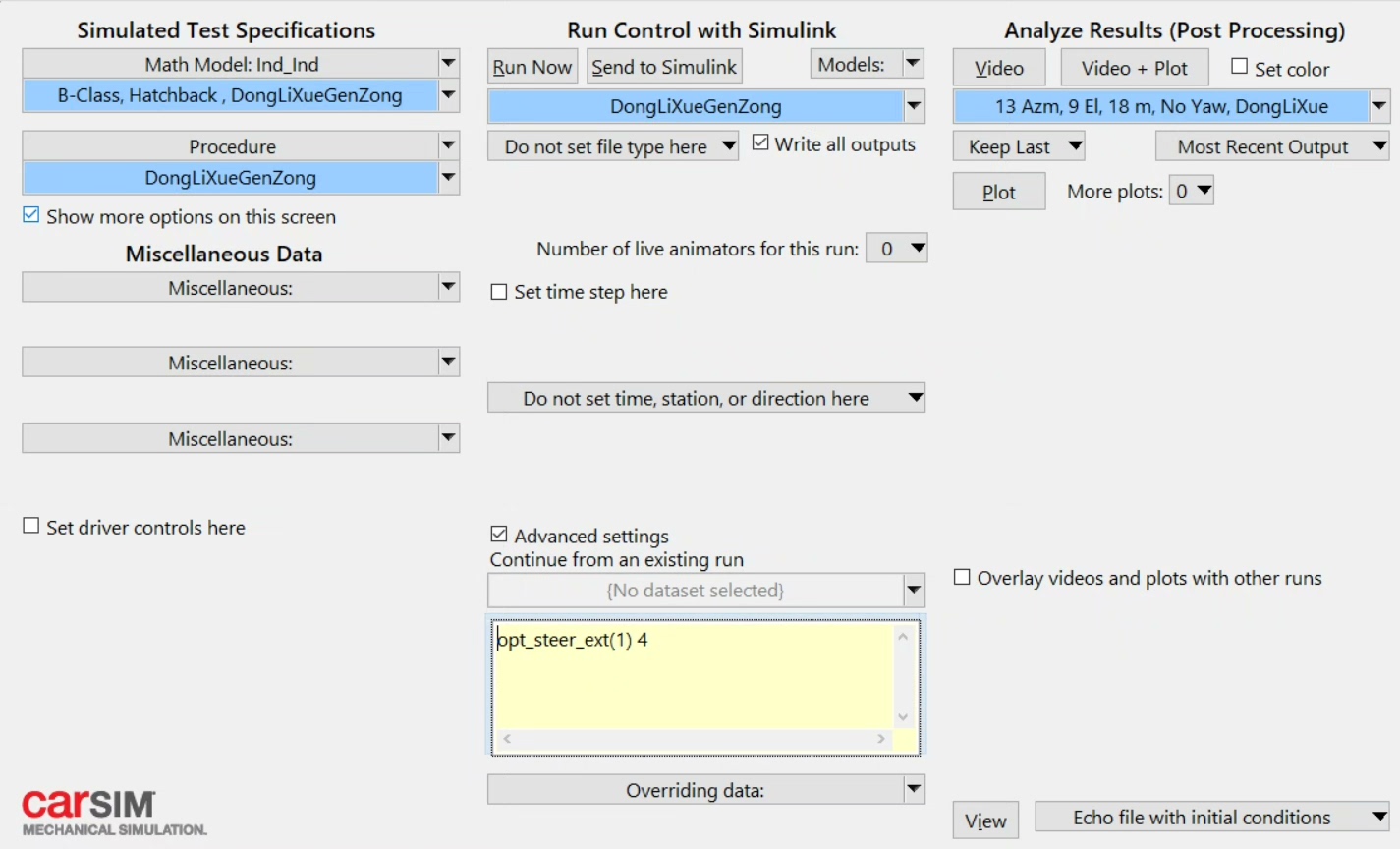
CarSim cpar文件
CarSim cpar文件是车辆动力学模型的参数文件,在整个轨迹跟踪系统中,它为模型提供了车辆相关的详细参数,比如车辆质量、轴距等,这些参数对于准确模拟车辆运动至关重要。
代码优势与学习价值
这套代码注释详细,对初学者极其友好。而且还录制了运行步骤视频,就算是小白也能轻松上手。从学习角度看,它清晰展示了simulink模型与.m文件的关系互联,教会你如何实现多参数自动调节,省时省力就能找到最优参数。
定制服务
如果你有接nmpc、mpc、车辆运动学、车辆动力学、轨迹跟踪、mpc参数寻优方面的定制需求,也可以联系。并且代码适用于CarSim2020,Matlab2019b及以下版本,不用担心软件版本兼容性问题。希望这个粒子群优化算法实现MPC参数自动调节的方案,能帮助大家在控制领域更进一步!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献31条内容
已为社区贡献31条内容

所有评论(0)