分布式驱动汽车稳定性控制:Simulink 实现探索
分布式驱动汽车稳定性控制。 采用纯Simulink模型搭建,包括控制策略和车辆动力学模型。 采用分层式直接横摆力矩控制,上层包括模型预测MPC,滑模控制SMC,PID控制,LQR控制。 可灵活对四种控制器对比和选择。 另外下层基于轮胎滑移率最优分配。 四种控制均可跟踪横摆角速度和质心侧偏角期望值。 车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度,二自由度模型输出理想质心侧偏角和横摆角速度。 具有初始化文件,Simulink模型,控制器说明,有参考文献和七自由度整车建模说明文档。
最近研究分布式驱动汽车稳定性控制,着实有趣,和大家分享下。这次我采用纯 Simulink 模型搭建整个系统,涵盖控制策略和车辆动力学模型两大关键部分。
分层式直接横摆力矩控制
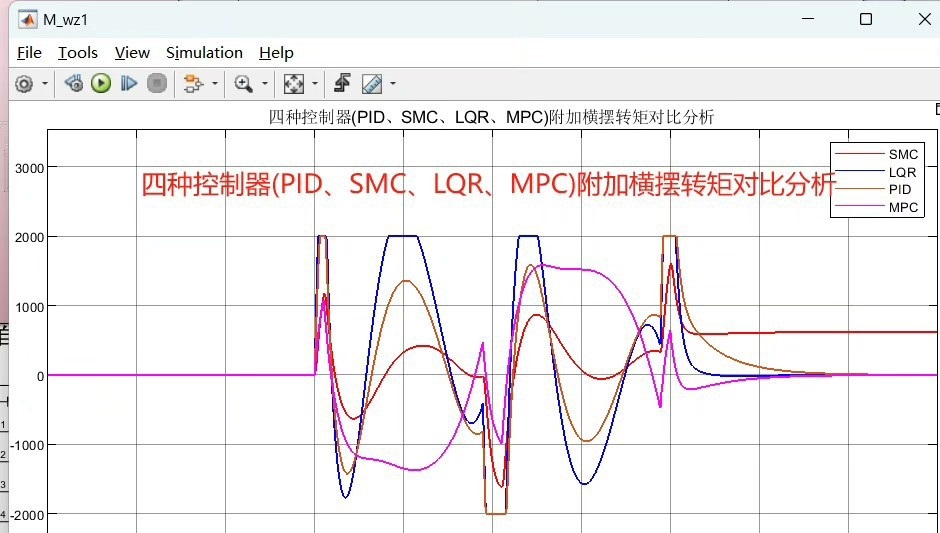
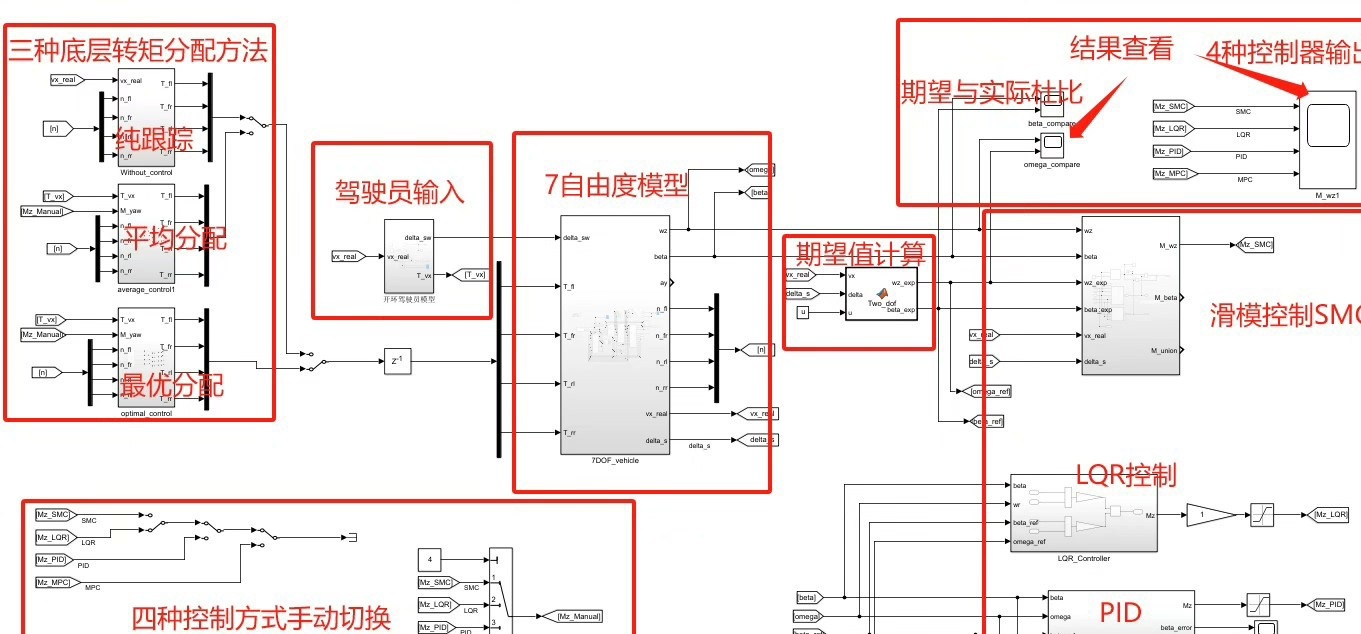
分层式直接横摆力矩控制是核心架构。上层汇聚了多种控制算法,像模型预测(MPC)、滑模控制(SMC)、PID 控制以及 LQR 控制。这种设计的妙处在于,能灵活地对这四种控制器进行对比和选择,以便在不同场景下找到最优控制方案。
以简单的 PID 控制为例,在 Simulink 里搭建 PID 控制器模块并不复杂。
% 简单的 PID 控制代码示例
Kp = 1; % 比例系数
Ki = 0.1; % 积分系数
Kd = 0.01; % 微分系数
error = desired_value - actual_value;
integral = integral + error * dt;
derivative = (error - previous_error) / dt;
control_output = Kp * error + Ki * integral + Kd * derivative;
previous_error = error;这里,desiredvalue 是期望值,actualvalue 是实际值。通过不断调整比例、积分、微分系数,就能让系统达到较好的控制效果。比例环节 Kp 能快速响应误差,积分环节 Ki 消除稳态误差,微分环节 Kd 预测误差变化趋势提前调节。
下层基于轮胎滑移率最优分配
下层基于轮胎滑移率最优分配来运作。这一步至关重要,它是将上层控制指令转化为实际轮胎动作的关键纽带。轮胎滑移率对车辆的操控性和稳定性影响巨大,合适的滑移率能让轮胎与地面间的摩擦力最大化,进而提升车辆的整体性能。
跟踪期望值
四种控制算法都肩负着共同使命——跟踪横摆角速度和质心侧偏角期望值。车辆被控对象这边,采用七自由度整车模型输出实际质心侧偏角和横摆角速度,二自由度模型输出理想质心侧偏角和横摆角速度。这种双模型结合的方式,能更全面、精准地描述车辆在行驶过程中的状态。
分布式驱动汽车稳定性控制。 采用纯Simulink模型搭建,包括控制策略和车辆动力学模型。 采用分层式直接横摆力矩控制,上层包括模型预测MPC,滑模控制SMC,PID控制,LQR控制。 可灵活对四种控制器对比和选择。 另外下层基于轮胎滑移率最优分配。 四种控制均可跟踪横摆角速度和质心侧偏角期望值。 车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度,二自由度模型输出理想质心侧偏角和横摆角速度。 具有初始化文件,Simulink模型,控制器说明,有参考文献和七自由度整车建模说明文档。
七自由度整车模型相对复杂,它考虑了车辆更多的运动细节,比如车辆的俯仰、侧倾等。而二自由度模型相对简单,聚焦于车辆的主要运动——侧向和横摆运动。在 Simulink 中,分别搭建这两个模型,并将它们的输出与控制算法相结合。
% 七自由度模型简化代码示意
% 这里省略大量复杂的动力学计算,仅展示结构
function [actual_slip_angle, actual_yaw_rate] = seven_dof_model(inputs)
% inputs 包含车辆速度、转向角等输入
% 进行一系列动力学方程计算
actual_slip_angle = calculate_slip_angle(inputs);
actual_yaw_rate = calculate_yaw_rate(inputs);
end上述代码简单示意了七自由度模型如何根据输入计算实际质心侧偏角和横摆角速度。
完备的资料支持
这个项目具备初始化文件,能方便快速搭建和启动 Simulink 模型。同时有控制器说明,对每种控制算法的原理、参数设置等都有详细阐述。还有参考文献和七自由度整车建模说明文档,无论是想深入研究理论,还是想仔细琢磨模型细节,都能找到有力支撑。
分布式驱动汽车稳定性控制在 Simulink 中的实现,是一个理论与实践紧密结合的有趣过程。通过多种控制算法的对比和基于轮胎滑移率的分配,为提升汽车行驶稳定性提供了有效途径。希望感兴趣的朋友可以一起交流探讨。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)