光伏并网逆变器的虚拟同步控制仿真模型搭建与探索
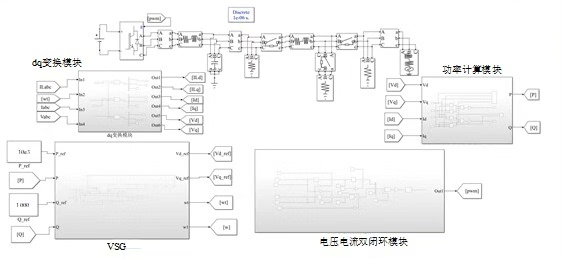
基于光伏并网逆变器的虚拟同步控制仿真模型 基于Matlab/Simulink仿真平台 主电路采用三相全桥PWM逆变器 1.仿真均能正常运行,能够准确跟踪对应参考值 2.控制部分采用基于PI控制器的双闭环控制,外环控制直流母线电压,内环控制电流跟踪给定值 3.逆变电路采用VSG+传统PI双闭环控制,能够实现输出功率PQ解耦,分别正确实现有功调频,无功调压的功能。 4增设针对VSG虚拟同步参数控制的上下界二值控制策略和模糊控制策略
在可再生能源领域,光伏并网逆变器的性能优化至关重要。今天咱们就来讲讲基于Matlab/Simulink仿真平台搭建的光伏并网逆变器虚拟同步控制仿真模型。
主电路:三相全桥PWM逆变器
主电路选用三相全桥PWM逆变器,为啥选它呢?因为三相全桥结构能够高效地将直流电转换为交流电,满足并网需求。在Matlab/Simulink里搭建这个电路也不难,通过Simscape Electrical模块库就能快速实现。比如下面简单示意一下搭建思路(代码只是示意逻辑,非实际可运行完整代码):
% 假设已经打开Simulink模型窗口
model = 'PV_grid_inverter_model';
open_system(model);
% 找到三相全桥PWM逆变器模块并进行参数设置
inverter_block = find_system(model, 'Name', 'Three - Phase Full - Bridge Inverter');
set_param(inverter_block, 'DC Voltage', '400V');
set_param(inverter_block, 'Switching Frequency', '10kHz');这里设置了直流侧电压为400V,开关频率10kHz,这些参数对逆变器的性能影响很大,实际应用中要根据具体需求调整。
控制部分:基于PI控制器的双闭环控制
控制部分采用基于PI控制器的双闭环控制,外环控制直流母线电压,内环控制电流跟踪给定值。这种双闭环结构稳定性强,能有效抑制干扰。
外环PI控制器代码示例(同样为示意代码):
% 外环PI控制器参数
kp_v = 0.5;
ki_v = 0.1;
v_ref = 400; % 直流母线电压参考值
v_bus = get_bus_voltage(); % 假设获取直流母线电压的函数
error_v = v_ref - v_bus;
integral_v = integral_v + error_v * dt;
v_control_signal = kp_v * error_v + ki_v * integral_v;外环通过不断调整输出信号,让直流母线电压尽量接近参考值。内环电流控制类似,根据给定电流值和实际电流差值进行PI调节,使电流快速准确跟踪给定值。
逆变电路:VSG + 传统PI双闭环控制
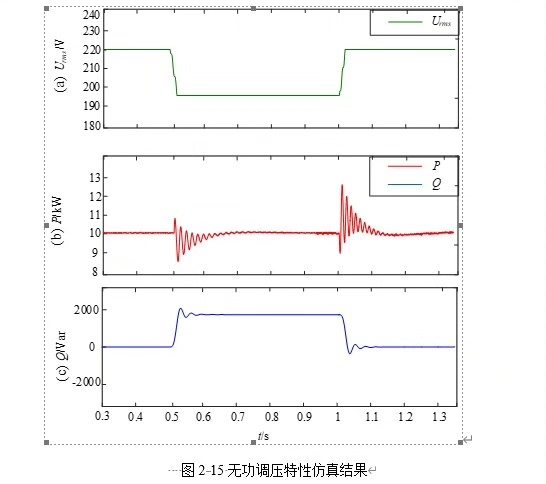
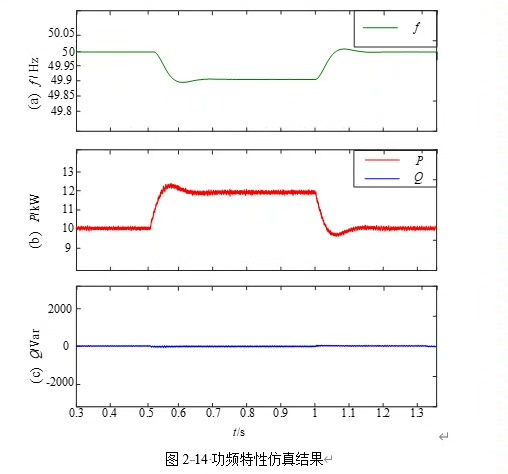
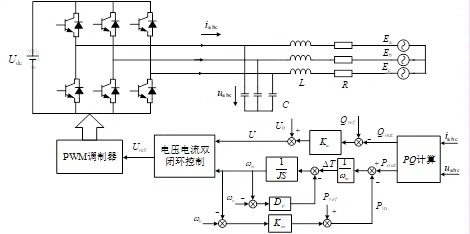
逆变电路采用VSG(虚拟同步发电机) + 传统PI双闭环控制,这可是个亮点。它能实现输出功率PQ解耦,分别正确实现有功调频,无功调压的功能。
基于光伏并网逆变器的虚拟同步控制仿真模型 基于Matlab/Simulink仿真平台 主电路采用三相全桥PWM逆变器 1.仿真均能正常运行,能够准确跟踪对应参考值 2.控制部分采用基于PI控制器的双闭环控制,外环控制直流母线电压,内环控制电流跟踪给定值 3.逆变电路采用VSG+传统PI双闭环控制,能够实现输出功率PQ解耦,分别正确实现有功调频,无功调压的功能。 4增设针对VSG虚拟同步参数控制的上下界二值控制策略和模糊控制策略
比如说有功功率控制部分代码:
% VSG有功功率控制相关参数
H = 0.5; % 虚拟惯性时间常数
D = 0.1; % 阻尼系数
P_ref = 1000; % 有功功率参考值
P = get_active_power(); % 假设获取实际有功功率的函数
omega = get_grid_frequency(); % 获取电网频率
omega_n = 2 * pi * 50; % 额定电网角频率
error_P = P_ref - P;
delta_omega = (error_P / (2 * H)) - D * (omega - omega_n);
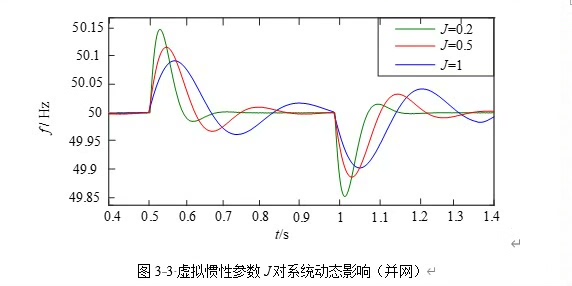
omega = omega + delta_omega * dt;通过调整虚拟惯性和阻尼等参数,VSG模拟同步发电机的运行特性,实现有功功率稳定输出和频率调节。无功调压也类似,通过对无功功率的检测和调节,稳定输出电压。
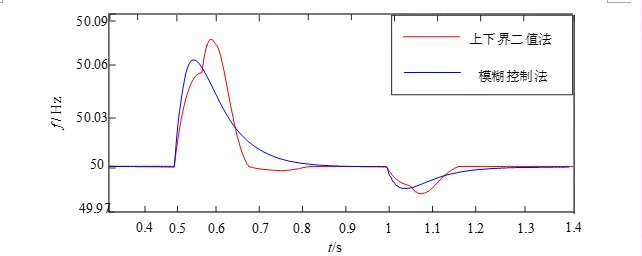
增设控制策略
为了进一步优化VSG性能,增设针对VSG虚拟同步参数控制的上下界二值控制策略和模糊控制策略。上下界二值控制就是设定参数的上下限,当参数超出范围就采取特定措施。模糊控制策略则更智能,它通过模糊逻辑处理输入信息,给出更合适的控制量。
以模糊控制为例,简单示意代码如下(只是基本框架):
% 模糊控制器初始化
fis = newfis('VSG_fuzzy');
% 添加输入输出变量
fis = addvar(fis, 'input', 'error_P', [-100, 100]);
fis = addvar(fis, 'input', 'error_Q', [-50, 50]);
fis = addvar(fis, 'output', 'control_signal', [-1, 1]);
% 添加隶属度函数
fis = addmf(fis, 'input', 1, 'NB', 'zmf', [-100, -50]);
fis = addmf(fis, 'input', 1, 'NS', 'trimf', [-75, -25, 25]);
% 此处省略更多隶属度函数添加
fis = addmf(fis, 'output', 1, 'PB', 'smf', [0, 1]);
% 添加模糊规则
rulelist = [1 1 1 1 1; % 简单的规则示例
2 2 2 1 1];
fis = addrule(fis, rulelist);
% 应用模糊控制器
error_P = get_active_power_error();
error_Q = get_reactive_power_error();
control_signal = evalfis([error_P, error_Q], fis);模糊控制通过更灵活地处理参数变化,让VSG控制更加自适应和稳定。
通过以上基于Matlab/Simulink搭建的仿真模型,从主电路到控制策略,能实现光伏并网逆变器的高效稳定运行,对提升光伏发电效率和稳定性有重要意义,感兴趣的小伙伴可以自己动手试试!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献35条内容
已为社区贡献35条内容

所有评论(0)