永磁同步电机双闭环矢量控制Simulink模型探索
永磁同步电机双闭环矢量控制simulink模型 (内含报告) PMSM矢量控制主要包括3个部分:转速环PI调节器、电流环PI调节器和SVPWM算法。 详细给出电流环和转速环PI调节器的参数设计方法,搭建转速电流双闭环矢量控制系统的仿真模型并给出仿真结果。 内含一万多字学习资料。
在电机控制领域,永磁同步电机(PMSM)因其高效、节能等优点被广泛应用。而双闭环矢量控制则是PMSM控制中常用且有效的策略。今天就来深入聊聊这个永磁同步电机双闭环矢量控制Simulink模型,里面还带一万多字学习资料呢,够咱们好好研究一番。
PMSM矢量控制的三大部分
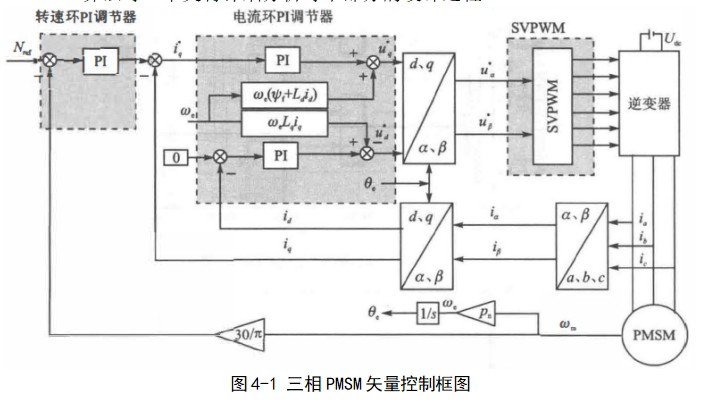
PMSM矢量控制主要涵盖3个关键部分:转速环PI调节器、电流环PI调节器以及SVPWM算法。
转速环PI调节器
转速环的作用是根据给定转速和实际转速的差值,通过PI调节器的调节,输出一个合适的电流给定值。PI调节器的公式大家应该不陌生:
% 简单的PI调节器代码示例(仅示意原理,非完整功能)
Kp = 0.5; % 比例系数
Ki = 0.1; % 积分系数
error = ref_speed - actual_speed; % 转速误差
integral = integral + error * dt; % 积分项
output = Kp * error + Ki * integral; % PI调节器输出在这个代码片段里,Kp和Ki是需要我们精心设计的参数。Kp决定了调节器对误差的快速响应程度,就像急性子,误差一出现马上做出大反应;而Ki则负责消除稳态误差,像个慢性子,慢慢把误差“磨平”。
电流环PI调节器
电流环接着转速环输出的电流给定值工作,它将电流给定值和实际电流值进行比较,同样通过PI调节器,输出合适的电压控制信号。其PI调节器的原理和转速环类似,不过参数设计得根据电流环的特性来。
% 电流环PI调节器代码示例(仅示意原理,非完整功能)
Kp_current = 1;
Ki_current = 0.2;
current_error = ref_current - actual_current;
current_integral = current_integral + current_error * dt;
voltage_output = Kp_current * current_error + Ki_current * current_integral;这里Kpcurrent和Kicurrent的取值很关键,得保证电流能够快速、稳定地跟踪给定值,就像靠谱的小跟班,主人(给定值)走到哪跟到哪。
SVPWM算法
SVPWM(空间矢量脉宽调制)算法的作用是把电流环输出的电压控制信号,转化为逆变器各个开关管的驱动信号,从而控制电机的运行。它通过巧妙地合成空间电压矢量,让电机能更高效地运行。
% 简单的SVPWM算法示意代码(仅原理示意,非完整功能)
function [t1, t2, t0] = svpwm(ualpha, ubata)
% 根据电压矢量计算扇区
theta = atan2(ubata, ualpha);
sector = floor((theta * 3 / pi) + 1);
% 计算各个矢量作用时间
% 这里省略复杂的计算细节,仅示意流程
%...
t1 =...;
t2 =...;
t0 =...;
end这个代码里,通过ualpha和ubata这两个电压分量计算出扇区sector,然后进一步算出各个基本电压矢量的作用时间t1、t2和t0,这些时间决定了逆变器开关管的通断,进而控制电机。
参数设计方法
电流环PI调节器参数设计
电流环的带宽通常比较高,我们一般根据电流环的截止频率来设计Kpcurrent和Kicurrent。比如说,先确定电流环期望的截止频率wc_current,然后根据一些经典的控制理论公式来计算参数。这里面涉及到电机的电感、电阻等参数,得仔细测量和计算。
转速环PI调节器参数设计
转速环的参数设计相对复杂点,得考虑电机的转动惯量、负载特性等。通常先根据经验或者一些简化的模型估算出Kp和Ki的大致范围,然后通过仿真或者实际调试来优化。比如先给一个保守点的Kp值,看看转速响应情况,再慢慢调整。
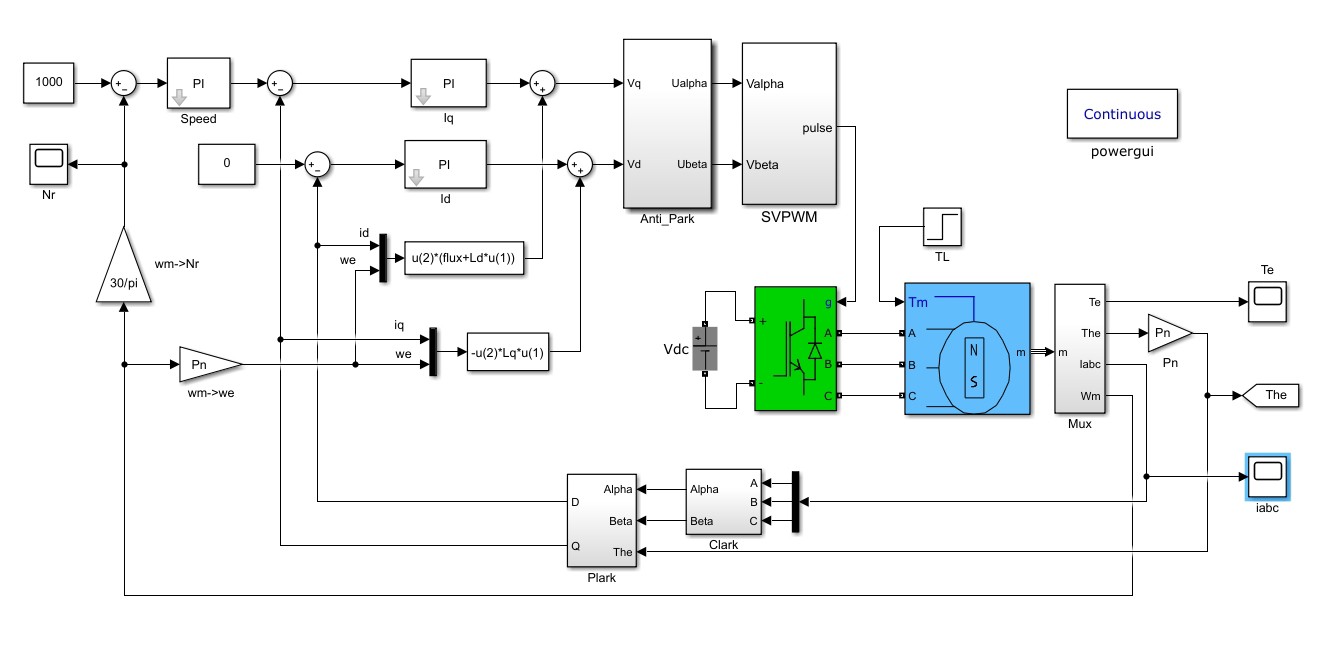
搭建仿真模型
在Simulink里搭建转速电流双闭环矢量控制系统的仿真模型。首先,我们把电机模型搭建好,这里可以选用Simulink自带的永磁同步电机模型库。然后分别搭建转速环和电流环的PI调节器模块,按照前面讲的参数设计方法设置好参数。再把SVPWM算法模块接入,连接好各个模块之间的信号流。
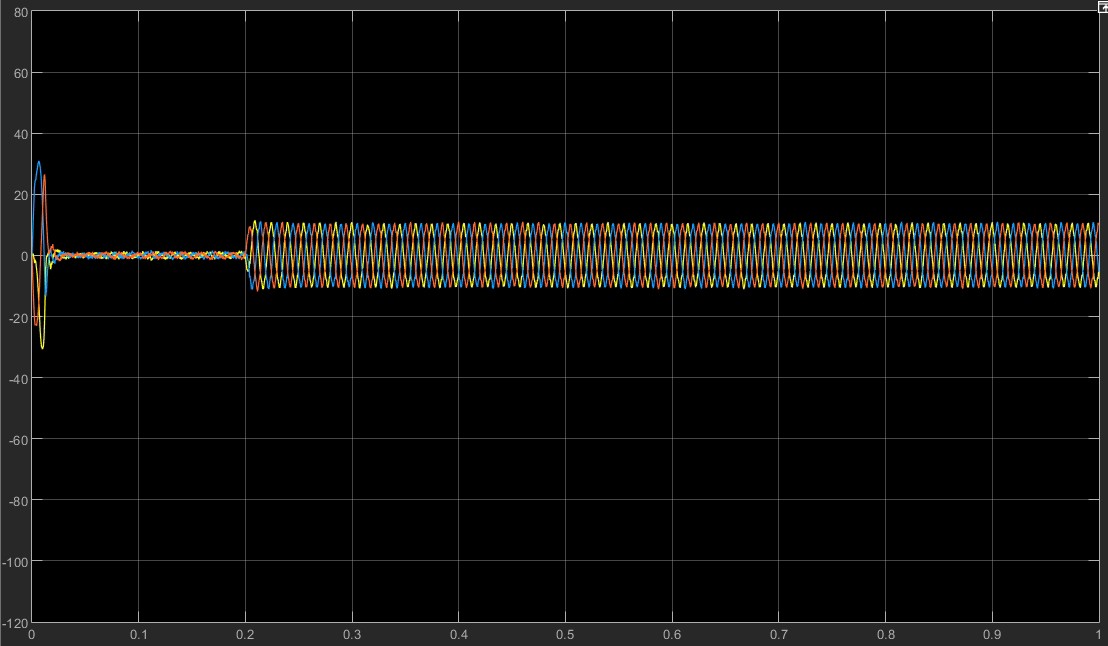
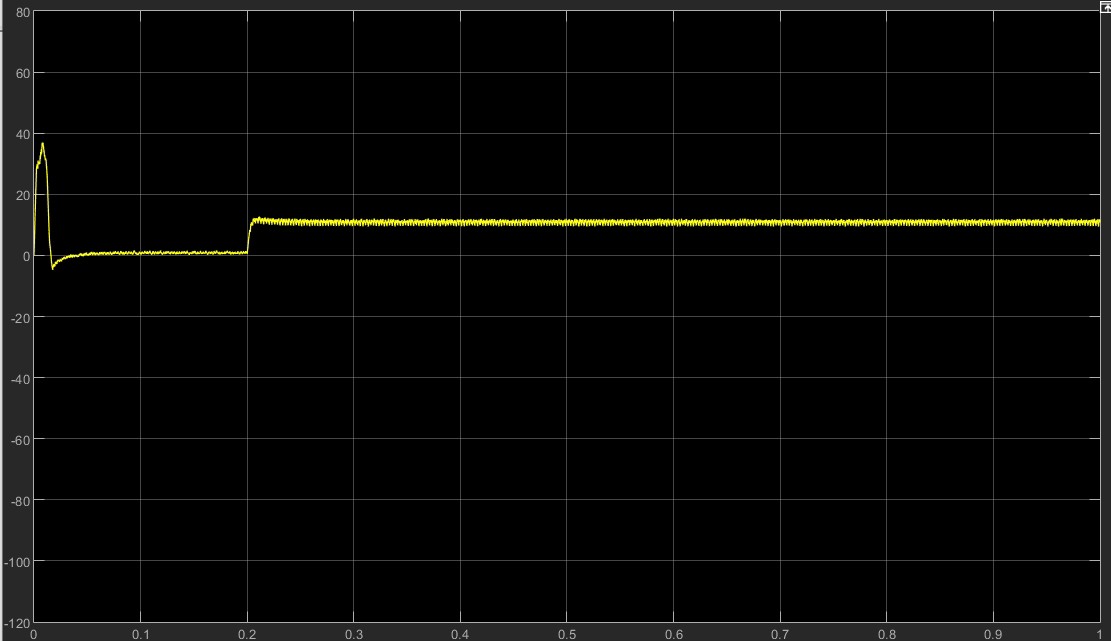
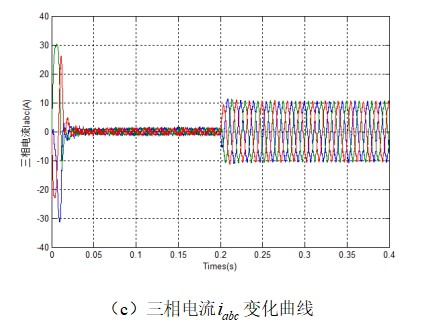
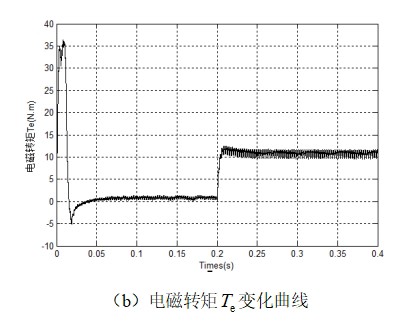
仿真结果
经过一番折腾,仿真跑起来啦。从仿真结果中我们能看到电机的转速快速跟踪给定转速,超调量在合理范围内,稳态误差也基本为零,这说明转速环PI调节器参数设计得还不错。电流环也能很好地跟踪给定电流,确保电机的平稳运行。
永磁同步电机双闭环矢量控制simulink模型 (内含报告) PMSM矢量控制主要包括3个部分:转速环PI调节器、电流环PI调节器和SVPWM算法。 详细给出电流环和转速环PI调节器的参数设计方法,搭建转速电流双闭环矢量控制系统的仿真模型并给出仿真结果。 内含一万多字学习资料。
总之,永磁同步电机双闭环矢量控制Simulink模型从理论到实践,每个环节都充满挑战和乐趣。这里面的一万多字学习资料更是宝藏,能让我们更深入地挖掘其中的奥秘。希望大家都能在这个领域有所收获,做出更优秀的电机控制系统。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献31条内容
已为社区贡献31条内容

所有评论(0)