基于YOLOv8/YOLOv10/YOLOv11/YOLOv12与SpringBoot的绝缘子缺陷检测系统(DeepSeek智能分析+web交互界面+前后端分离+YOLO数据)
摘要
随着高压输电线路规模的不断扩大,作为电网关键承重与绝缘部件的绝缘子,其运行状态的实时监测与缺陷精准识别对保障电力系统安全、稳定运行至关重要。传统的人工巡检方式存在效率低、危险性高、主观性强等弊端,无法满足现代智能电网的发展需求。
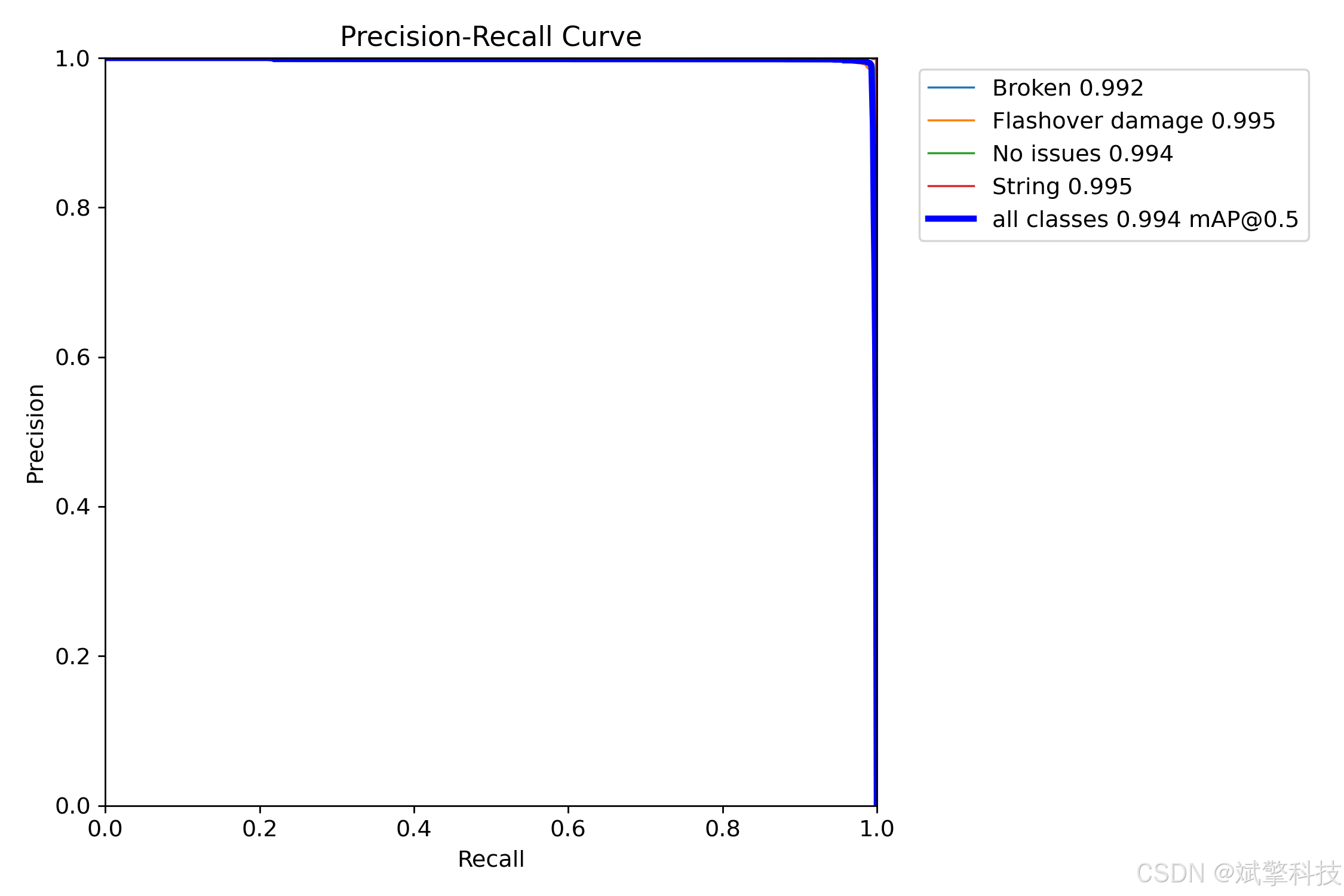
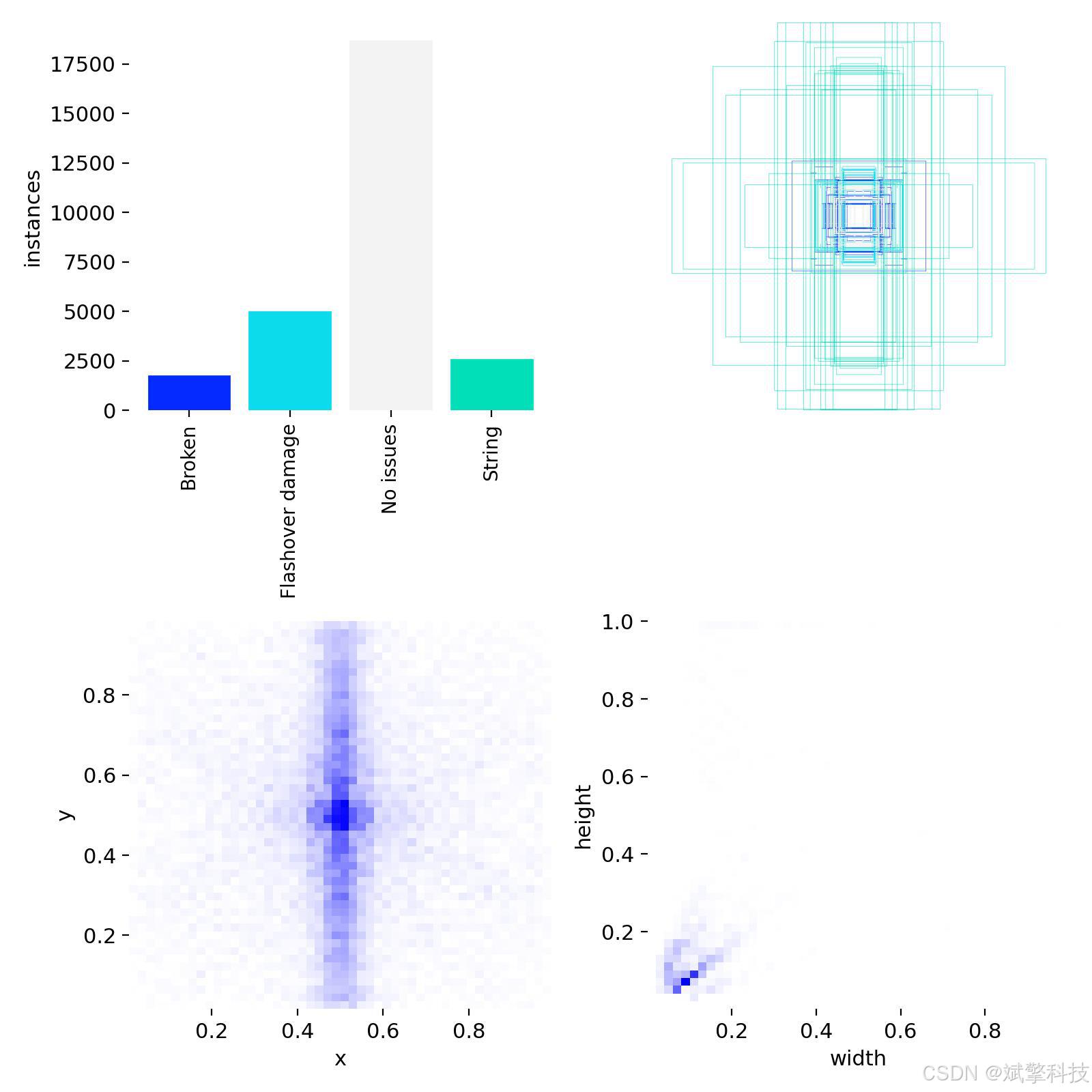
本项目旨在设计并实现一套集先进目标检测算法、现代化Web交互界面与智能分析于一体的“智能绝缘子缺陷检测与分析系统”。系统核心技术层采用当前YOLO系列最新模型(包括YOLOv8、YOLOv10、YOLOv11及YOLOv12),构建了一个高性能、可切换的视觉检测引擎,专门用于从复杂背景的航拍或地面巡检图像/视频中,准确识别并定位绝缘子的四种典型状态:‘绝缘子串’(正常)、‘完好单片’(无缺陷)、‘破损’以及‘闪络损伤’。基于一个包含3200张高质量标注图片(训练集2240张,验证集640张,测试集320张)的自建数据集,我们对模型进行了充分的训练与优化,确保其在真实场景下的鲁棒性。
系统应用层采用前后端分离的现代化架构。后端基于SpringBoot框架构建,负责核心业务逻辑、模型推理接口、用户认证与数据持久化。前端提供友好的交互式Web界面,支持用户进行便捷操作。数据层使用MySQL数据库,系统性地存储用户信息、模型配置、以及所有检测任务(图片、视频、实时摄像头)的历史记录与详细结果,为状态追踪与统计分析提供数据基础。
本系统的核心创新与功能亮点在于:
-
多模型动态切换:用户可根据实时需求或对不同场景的适应性,在四种前沿YOLO模型间灵活切换,实现检测精度与速度的平衡选择。
-
全模态检测支持:无缝支持图片上传检测、视频文件分析、以及摄像头实时流媒体检测,满足从离线分析到在线监控的不同应用场景。
-
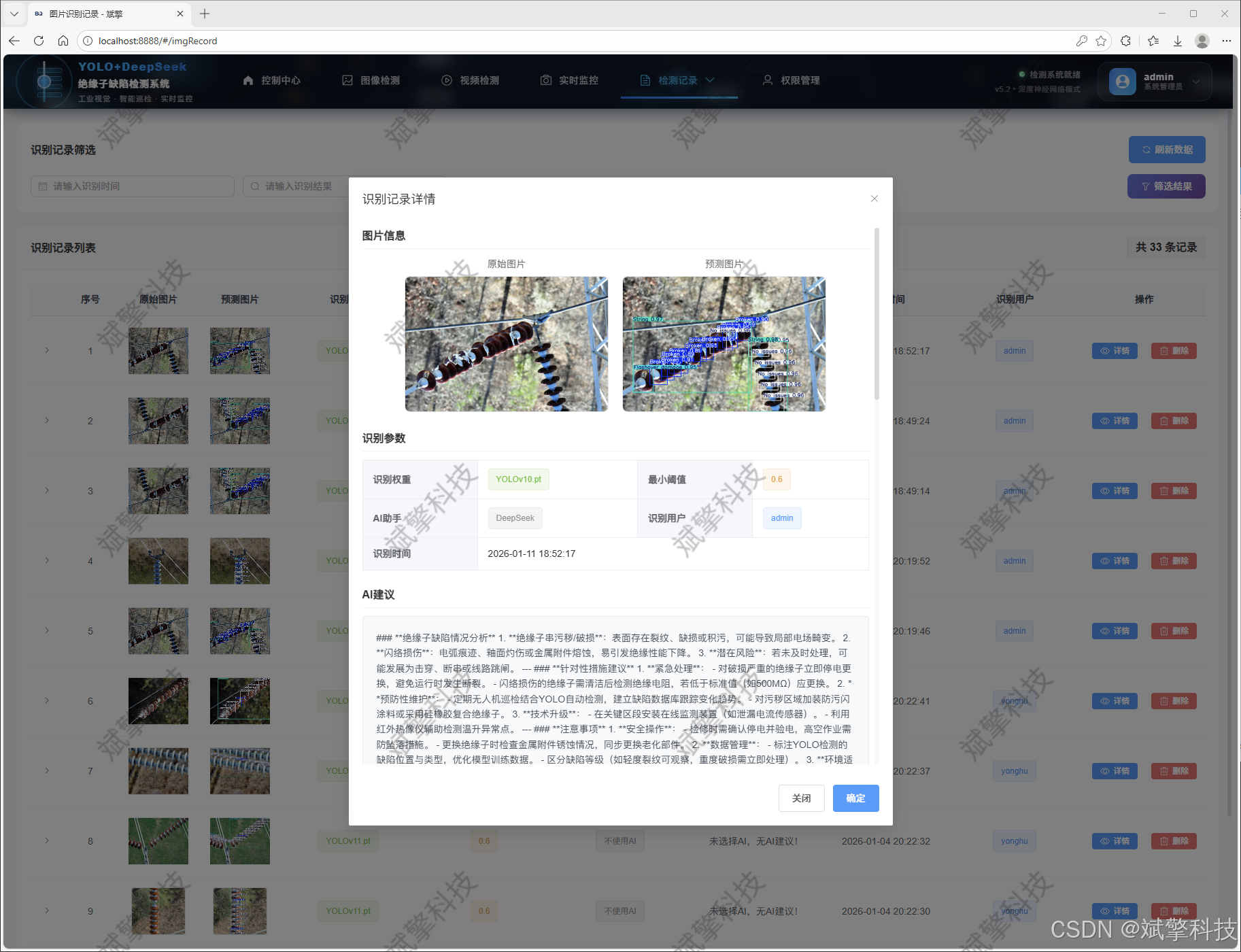
深度智能分析集成:创新性地整合了DeepSeek大型语言模型的智能分析能力。在完成视觉检测后,系统可将识别结果自动生成结构化的检测报告,并可由DeepSeek进行深入解读、成因分析与维护建议的文本生成,极大提升了系统的决策支持水平。
-
全面的数据管理与可视化:提供完整的用户管理体系(管理员/普通用户)、个人中心、以及多维度的信息与数据可视化面板。所有检测操作均有迹可循,识别记录可进行查询、管理与统计,直观展示缺陷分布、检测频率等关键指标。
-
健壮的用户系统:实现了包含注册、登录、权限控制、个人信息管理(头像、密码修改)等功能的完整用户体系,保障了系统的安全性与个性化体验。
综上所述,本系统不仅是一个高效的绝缘子缺陷自动化检测工具,更是一个集模型管理、数据资产沉淀、智能诊断与协同管理于一体的综合运维平台。它有效解决了传统巡检模式的痛点,为电力设施的智能化、数字化巡检提供了切实可行的解决方案,具有重要的工程应用价值与推广前景。
目录
详细功能展示视频
基于YOLO和DeepSeek的绝缘子损坏识别检测系统(千问大模型+web+YOLOv8/YOLOv10/YOLOv11/YOLOv12+python)_哔哩哔哩_bilibili
基于YOLO和DeepSeek的绝缘子损坏识别检测系统(千问大模型+web+YOLOv8/YOLOv10/YOLOv11/YOLOv12+python)_哔哩哔哩_bilibili![]() https://www.bilibili.com/video/BV1RhfoBeEyy/?spm_id_from=333.999.0.0&vd_source=549d0b4e2b8999929a61a037fcce3b0fhttps://www.bilibili.com/video/BV1RhfoBeEyy/
https://www.bilibili.com/video/BV1RhfoBeEyy/?spm_id_from=333.999.0.0&vd_source=549d0b4e2b8999929a61a037fcce3b0fhttps://www.bilibili.com/video/BV1RhfoBeEyy/

一、 引言
1.1 研究背景与意义
绝缘子是输电线路中用于电气绝缘和机械固定的关键部件,其长期暴露在自然环境中,承受着电气、机械和环境的综合应力,极易产生诸如瓷瓶破损、伞裙裂纹、闪络灼伤等多种缺陷。这些缺陷如未能被及时发现和处理,轻则引起局部放电、电能损耗,重则可能导致绝缘击穿、线路跳闸,甚至引发大规模的停电事故,造成巨大的经济损失与社会影响。因此,对绝缘子状态的定期、高效检测是电力系统预防性维护的核心环节。
目前,我国电力巡检正逐步从“人工为主”向“自动化、智能化”模式过渡。无人机(UAV)巡检和固定监控摄像头的大规模应用,产生了海量的图像与视频数据。如何从这些非结构化的视觉数据中,快速、准确地自动识别出缺陷目标,成为制约巡检效率提升的技术瓶颈。近年来,以卷积神经网络(CNN)为代表的深度学习技术,特别是以YOLO(You Only Look Once)系列为代表的一阶段目标检测算法,因其卓越的检测速度和不断精进的精度,已成为工业视觉检测领域的研究热点。
然而,将前沿的AI算法转化为稳定、易用、可管理的实际业务系统仍面临挑战:模型迭代迅速(如从v8到v12),如何兼容与评估?单点检测功能如何扩展为支持多用户、多任务、有记忆的平台?检测结果如何从“边界框”升级为“决策建议”?这些问题要求我们构建一个软硬一体、算法与应用并重的完整系统。
1.2 国内外研究现状
在学术研究层面,基于深度学习的绝缘子缺陷检测已取得丰硕成果。早期研究多采用Faster R-CNN等两阶段算法,精度较高但速度较慢。近年来,YOLO系列因其优异的实时性,成为该领域的主流选择。学者们通过在YOLOv5、YOLOv7等框架上引入注意力机制、优化损失函数、改进特征融合网络等方式,针对小目标、复杂背景等特定难点进行改进,显著提升了绝缘子缺陷的检测性能。随着YOLOv8(无锚框设计)、YOLOv10(效率-精度分离)、YOLOv11/YOLOv12等最新版本的陆续推出,算法性能边界不断被刷新,为工程应用提供了更强大的基础模型。
在系统应用层面,现有解决方案多为离线的脚本工具或嵌入式的单机软件,普遍存在以下不足:
-
功能单一:往往仅提供图片检测,缺乏对视频流和实时摄像头的支持,难以覆盖全场景。
-
缺乏管理:没有用户体系、没有检测历史管理、数据零散,无法形成可追溯的知识库。
-
交互性差:通常为命令行或简单的本地界面,不易于非技术人员操作,且不支持远程访问与协同。
-
“只检不析”:输出仅为带标注框的图片,缺乏对检测结果的聚合、统计和进一步的智能分析,未能充分挖掘数据价值。
-
模型固化:系统通常绑定单一模型,无法灵活利用最新算法成果或针对不同场景选择最优模型。
1.3 本项目主要工作与贡献
针对上述研究空白与实际需求,本项目的核心工作是设计并实现一个功能完备、架构先进、体验友好的智能绝缘子缺陷检测与分析系统。具体贡献如下:
-
构建高性能、可演进的检测核心:集成YOLOv8至YOLOv12四种最新模型,在一个统一的框架下进行训练与性能对比。用户可根据任务需求(如偏向速度或精度)灵活切换模型,实现了检测核心的动态升级与择优选择。
-
设计并实现全栈式Web应用系统:采用“前后端分离”的现代化Web架构。SpringBoot后端提供稳健的RESTful API服务,负责模型加载、推理调度、用户认证授权(基于MySQL)及所有业务逻辑。响应式前端界面提供直观的操作流程,使得复杂的AI检测能力能够通过浏览器被轻松访问和使用。
-
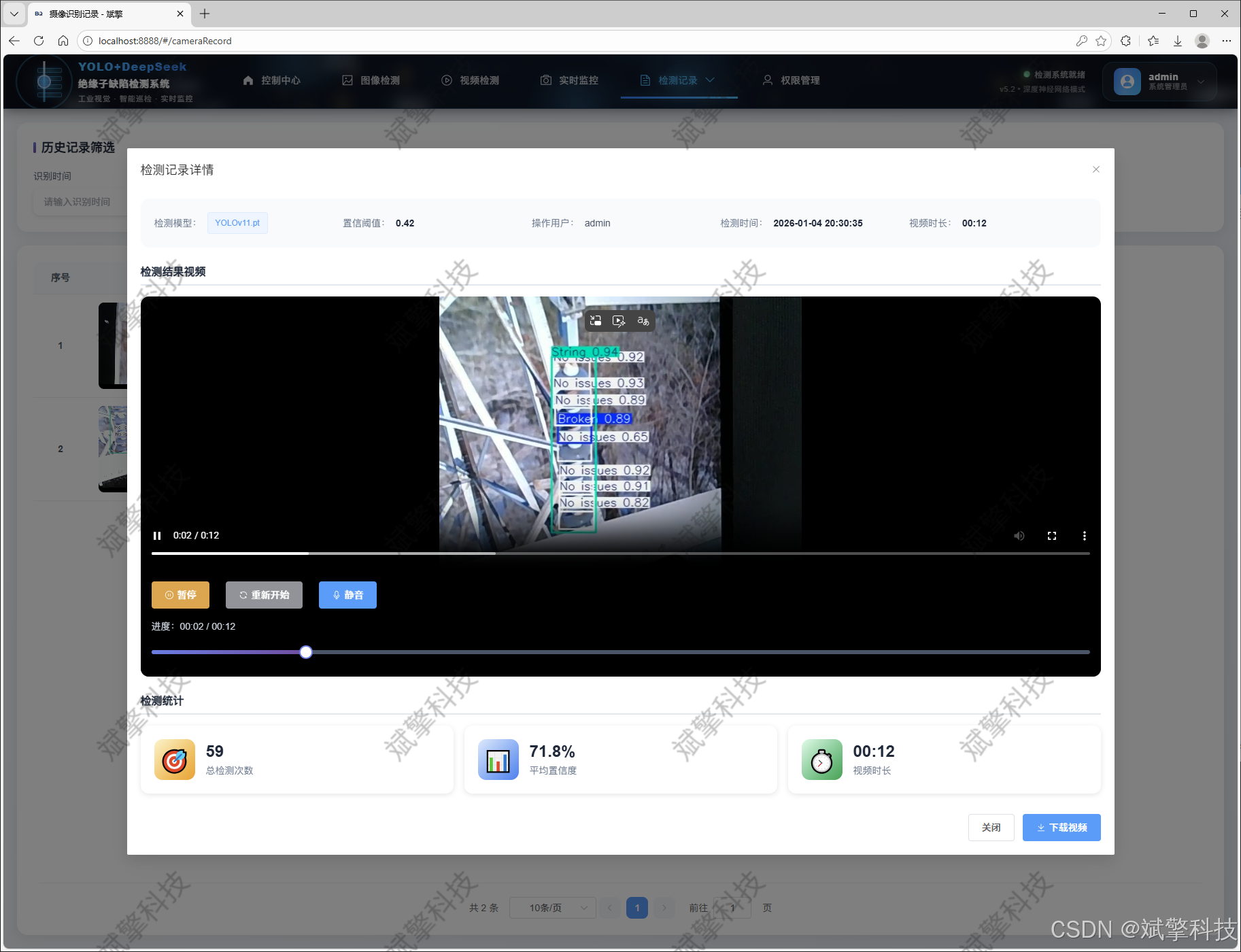
实现多模态输入与数据持久化:系统完整支持图片、视频、摄像头实时流三种输入模式的缺陷检测。所有检测请求、结果图片、统计信息(如缺陷类别、数量、置信度、处理时间)均结构化存入MySQL数据库,实现了检测任务的全程可追溯与数据资产化。
-
创新性集成LLM智能分析:突破传统检测系统的局限,在检测流程后端接入DeepSeek大型语言模型。系统能自动将视觉检测结果转换为文本描述,并调用DeepSeek生成包含缺陷概况总结、潜在风险分析、初步维护建议在内的综合性分析报告,将“视觉感知”提升至“认知理解”层面。
-
开发完善的管理与可视化功能:系统内置完整的用户角色管理体系(普通用户与管理員),提供个人中心。管理员拥有用户管理、全局数据查看权限。系统配备丰富的图表可视化组件,对用户行为、检测任务统计、缺陷类别分布等进行多维展示,辅助管理者进行决策。
-
提供友好的用户体验与安全保证:从用户注册登录、个人信息修改(头像上传、密码更新)、到简洁的检测任务提交与结果展示界面,每一个环节都注重交互细节。严格的用户认证与权限控制确保了系统数据的安全。
二、 系统核心特性概述
功能模块
✅ 用户登录注册:支持密码检测,保存到MySQL数据库。
✅ 支持四种YOLO模型切换,YOLOv8、YOLOv10、YOLOv11、YOLOv12。
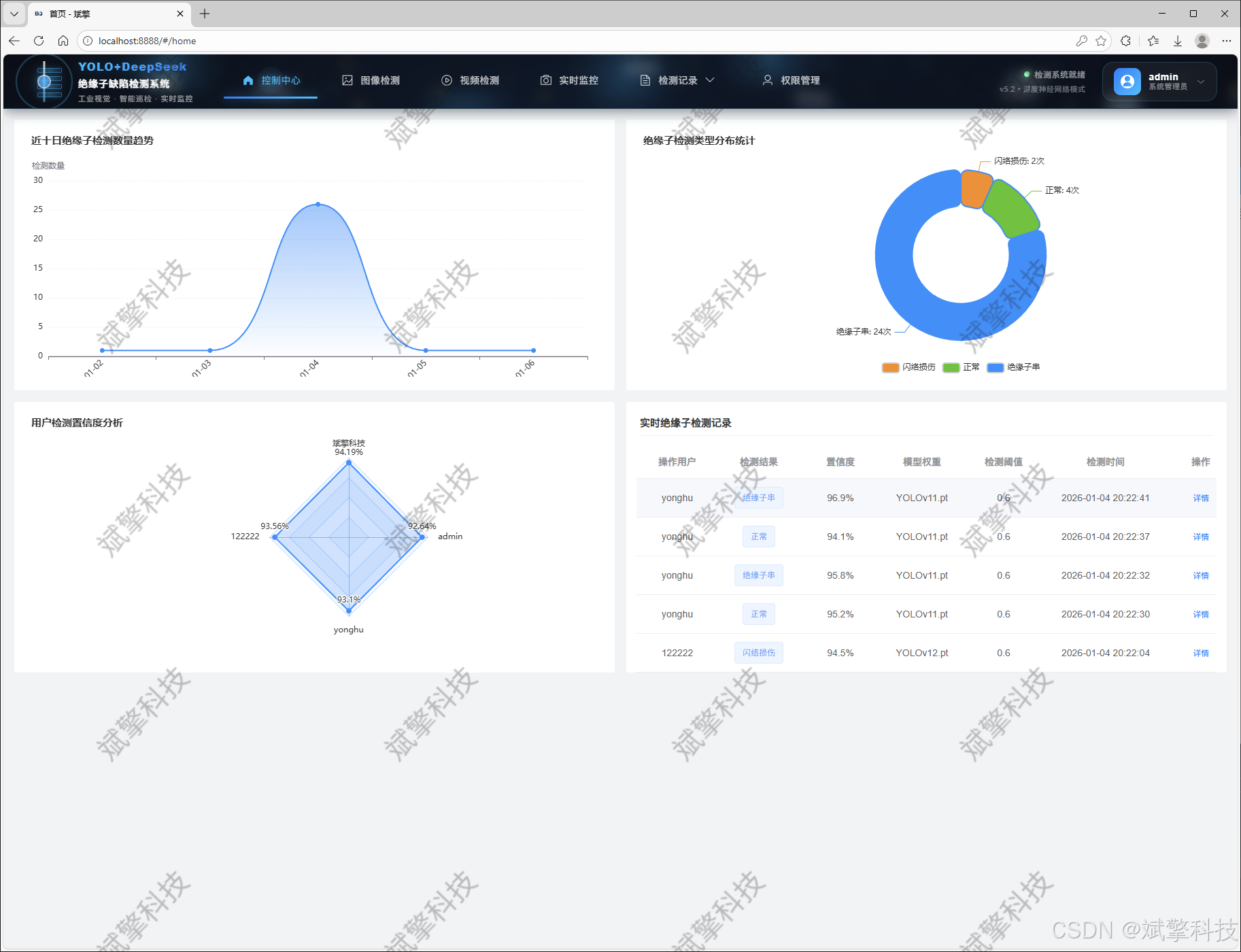
✅ 信息可视化,数据可视化。
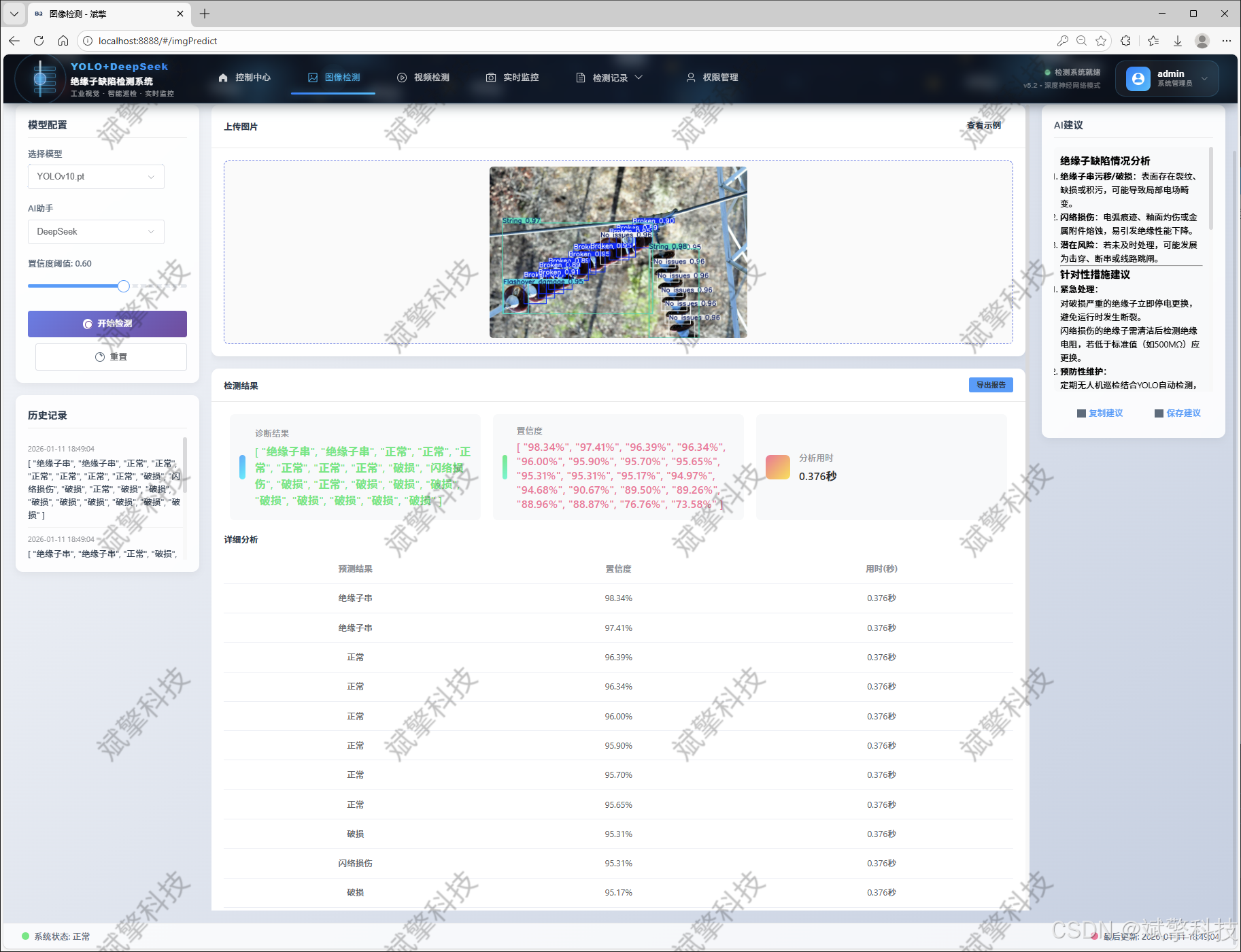
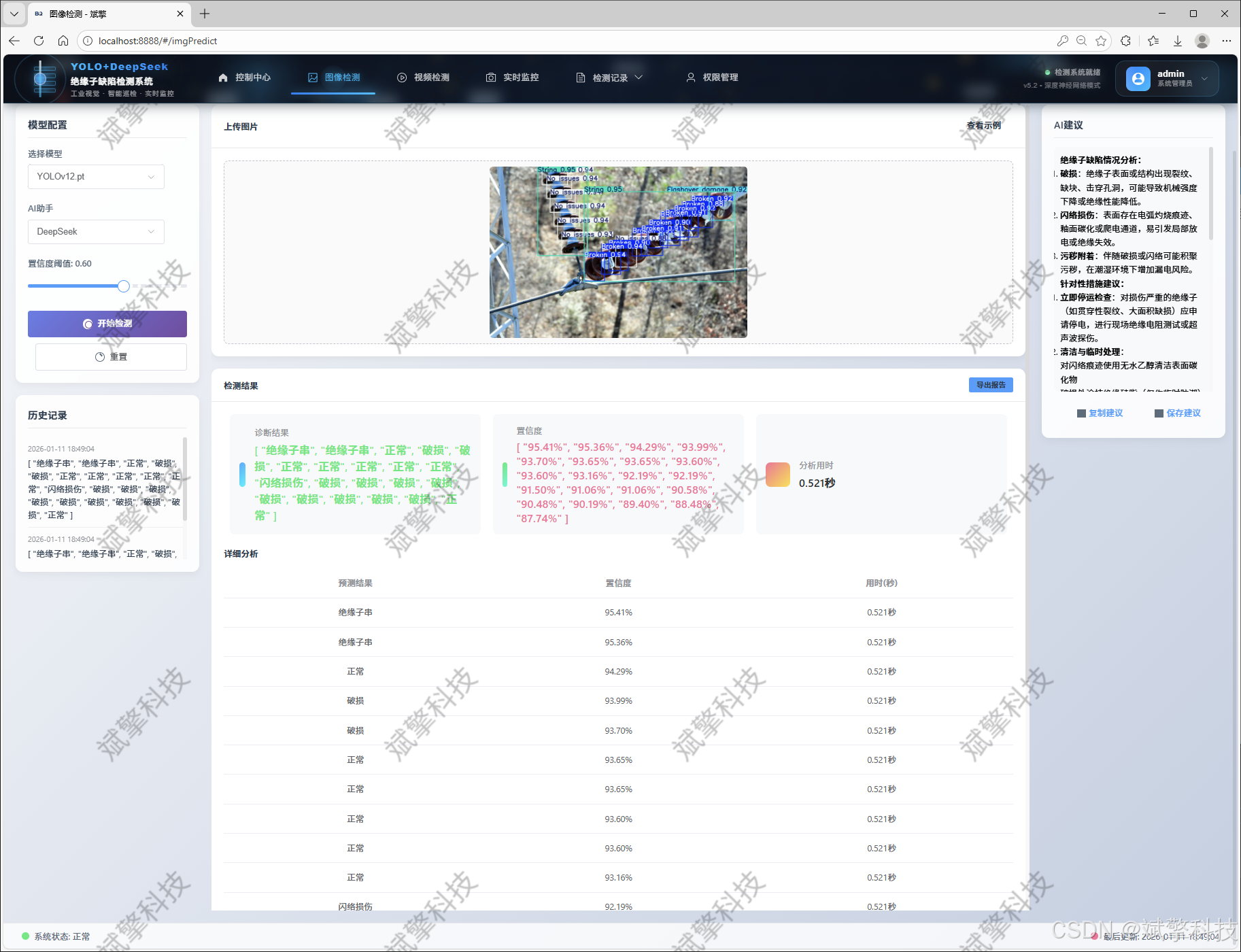
✅ 图片检测支持AI分析功能,deepseek
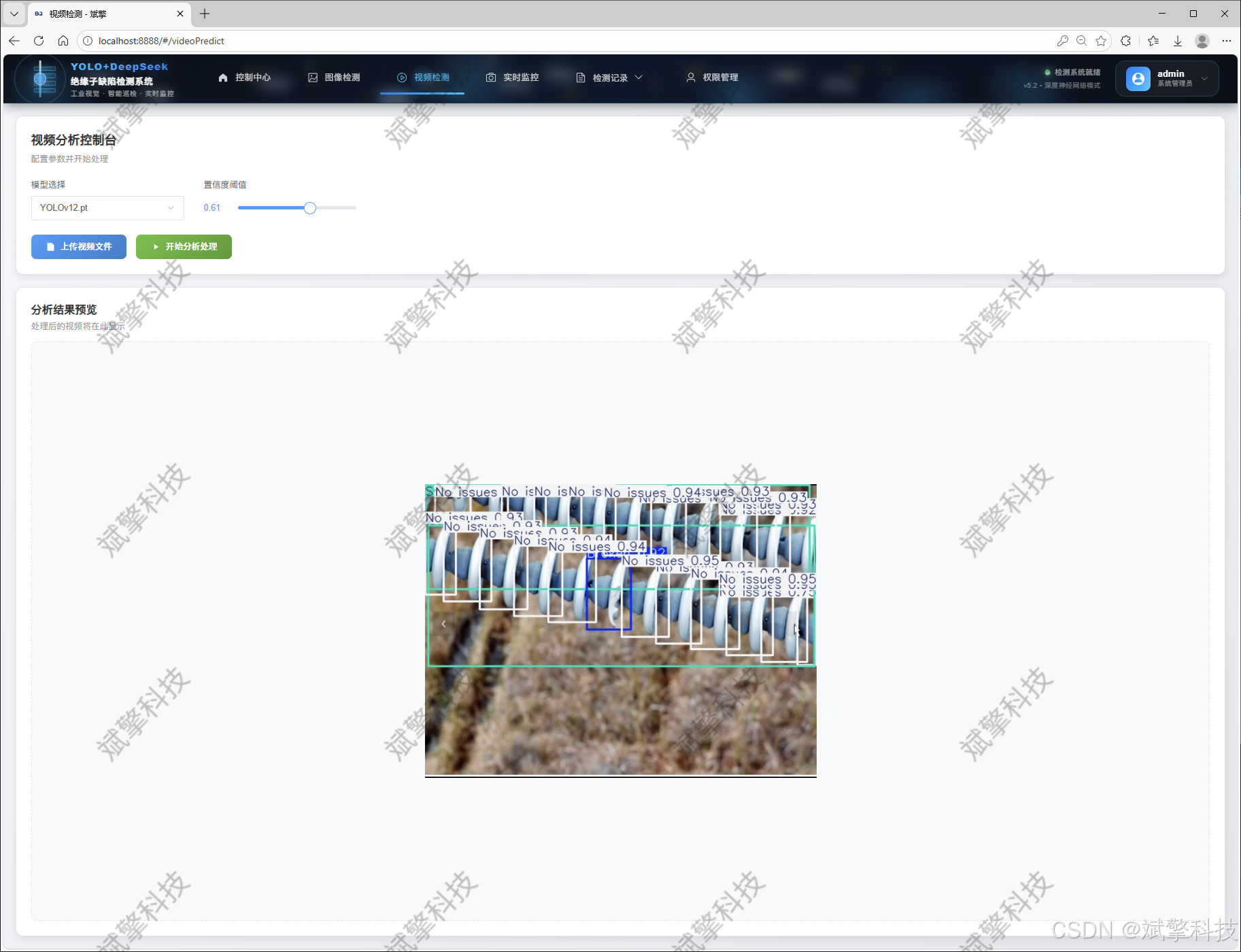
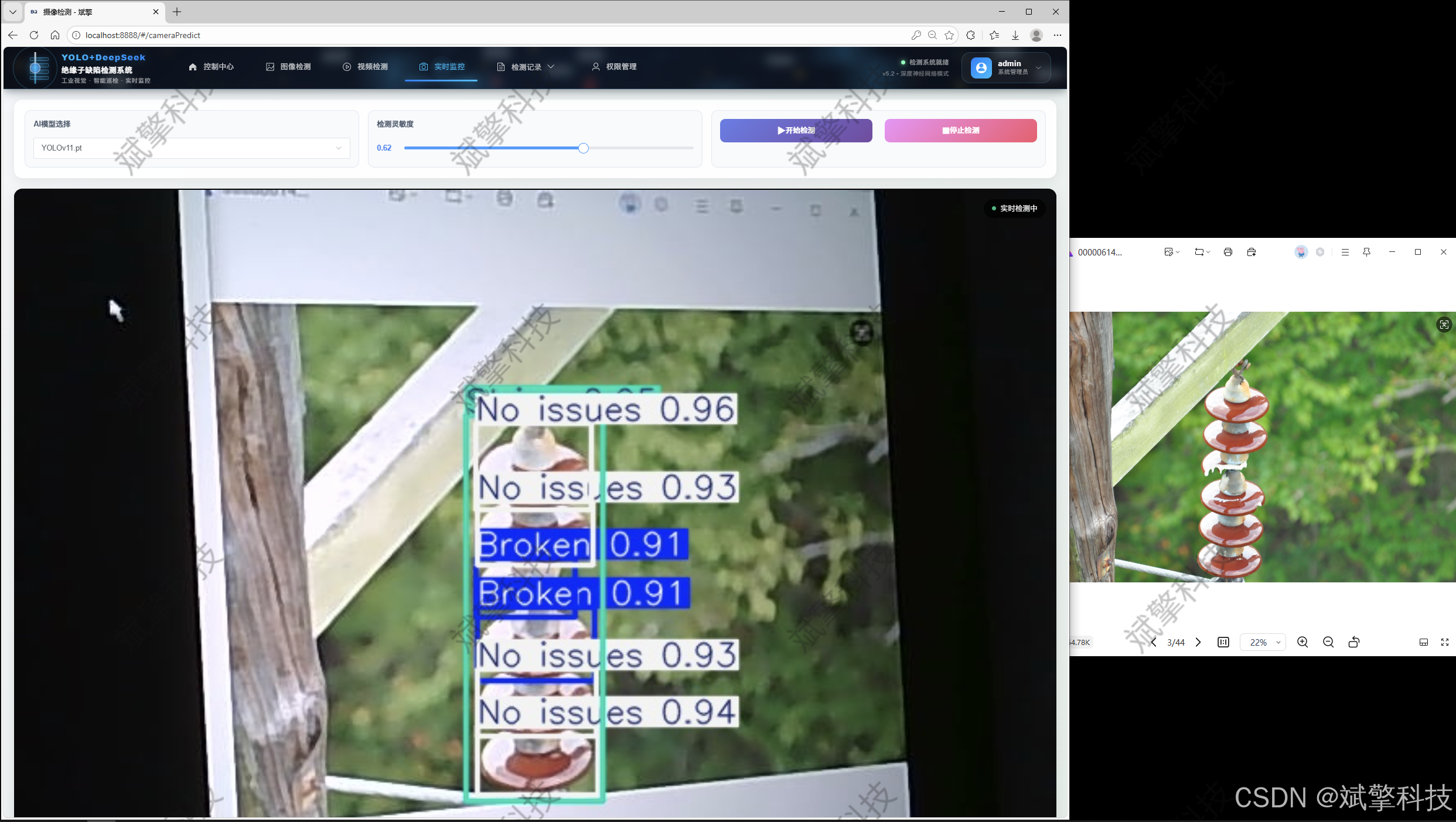
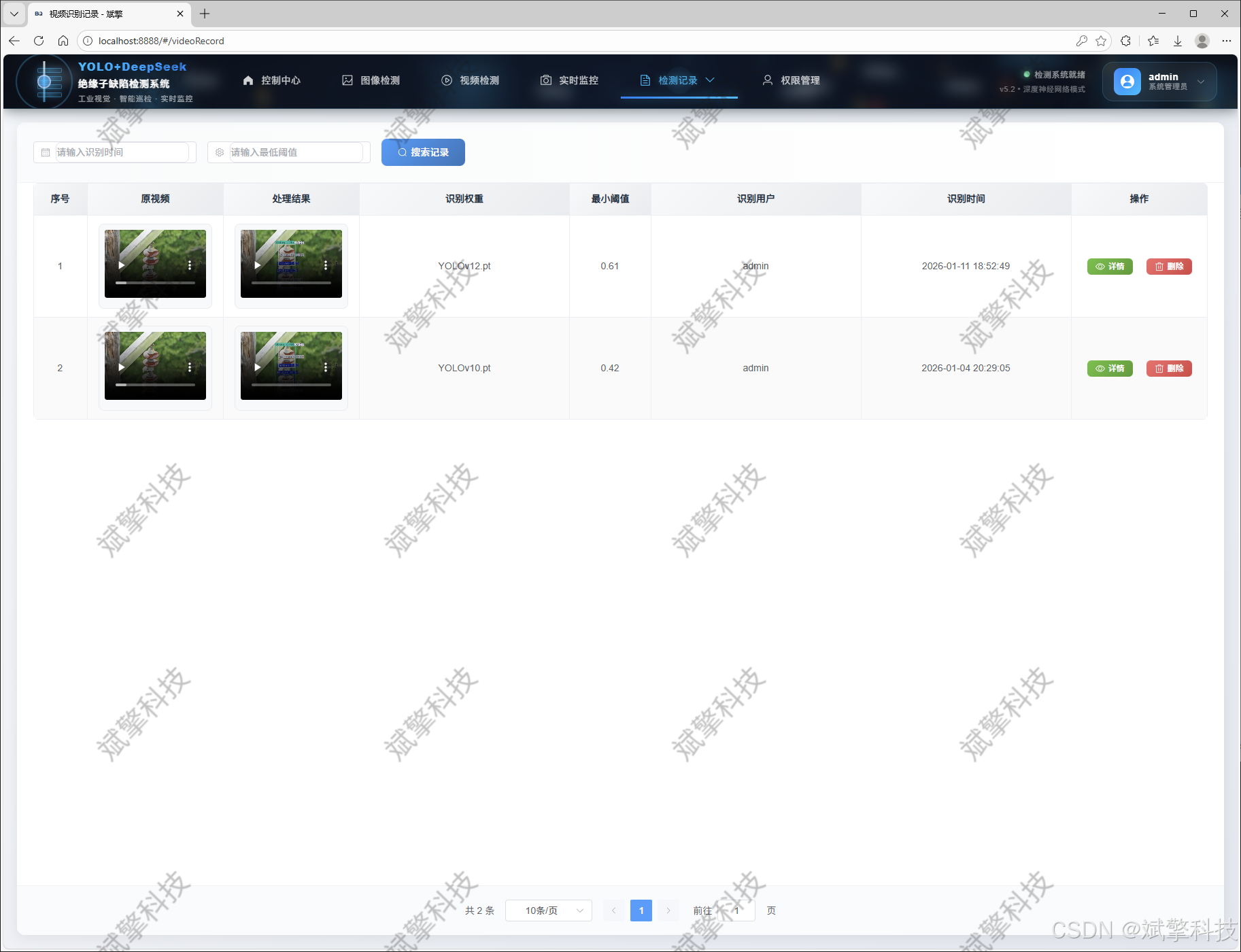
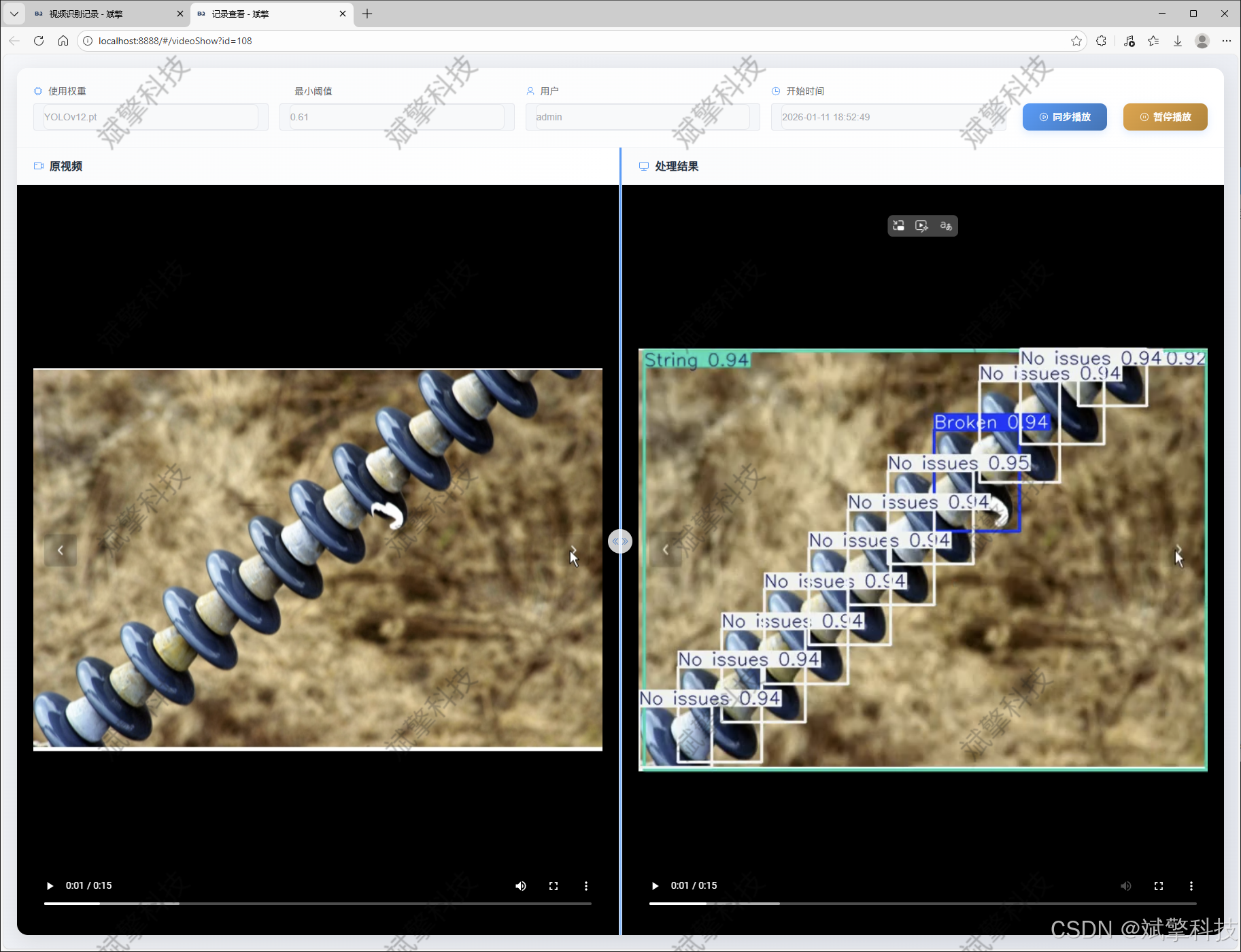
✅ 支持图像检测、视频检测和摄像头实时检测,检测结果保存到MySQL数据库。
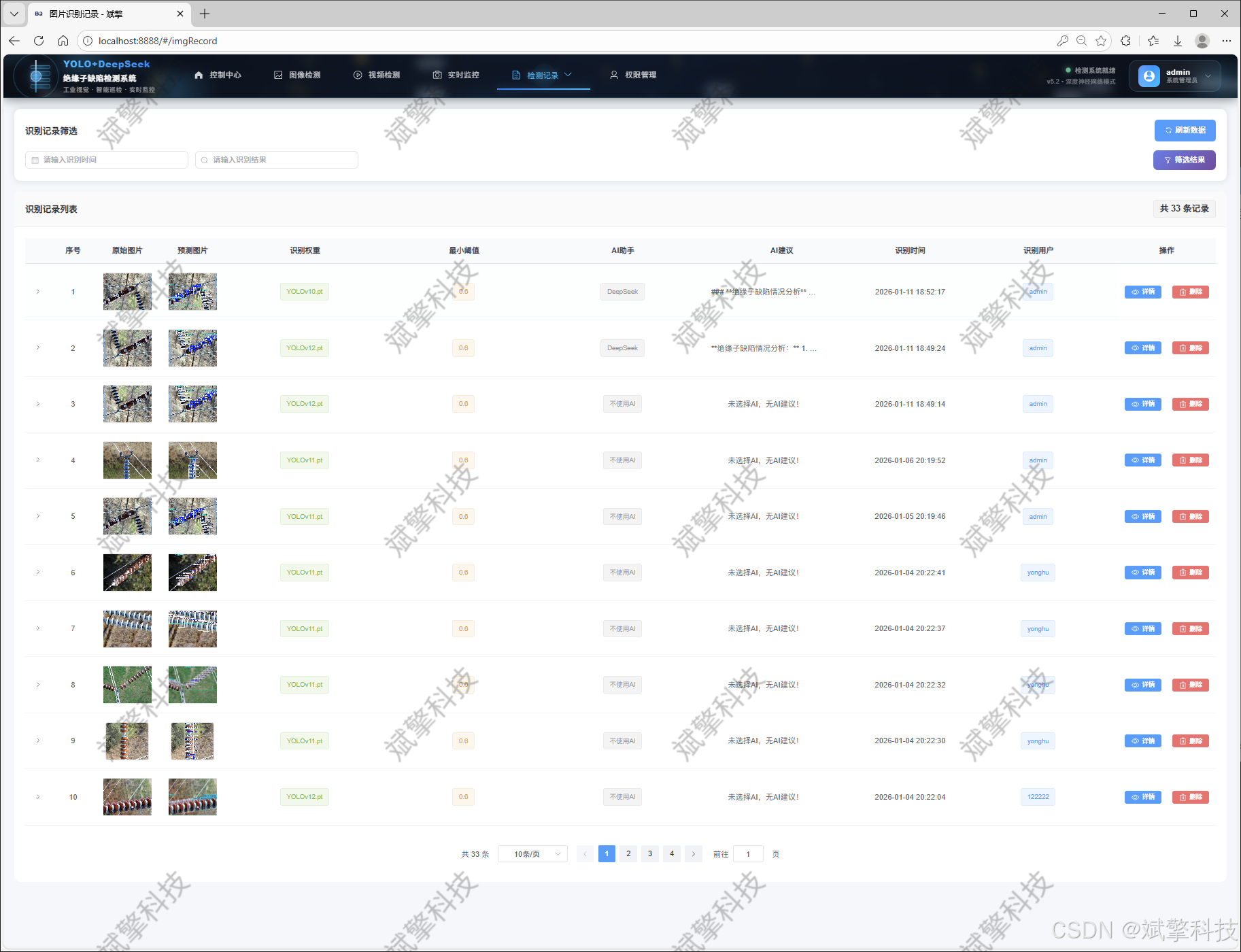
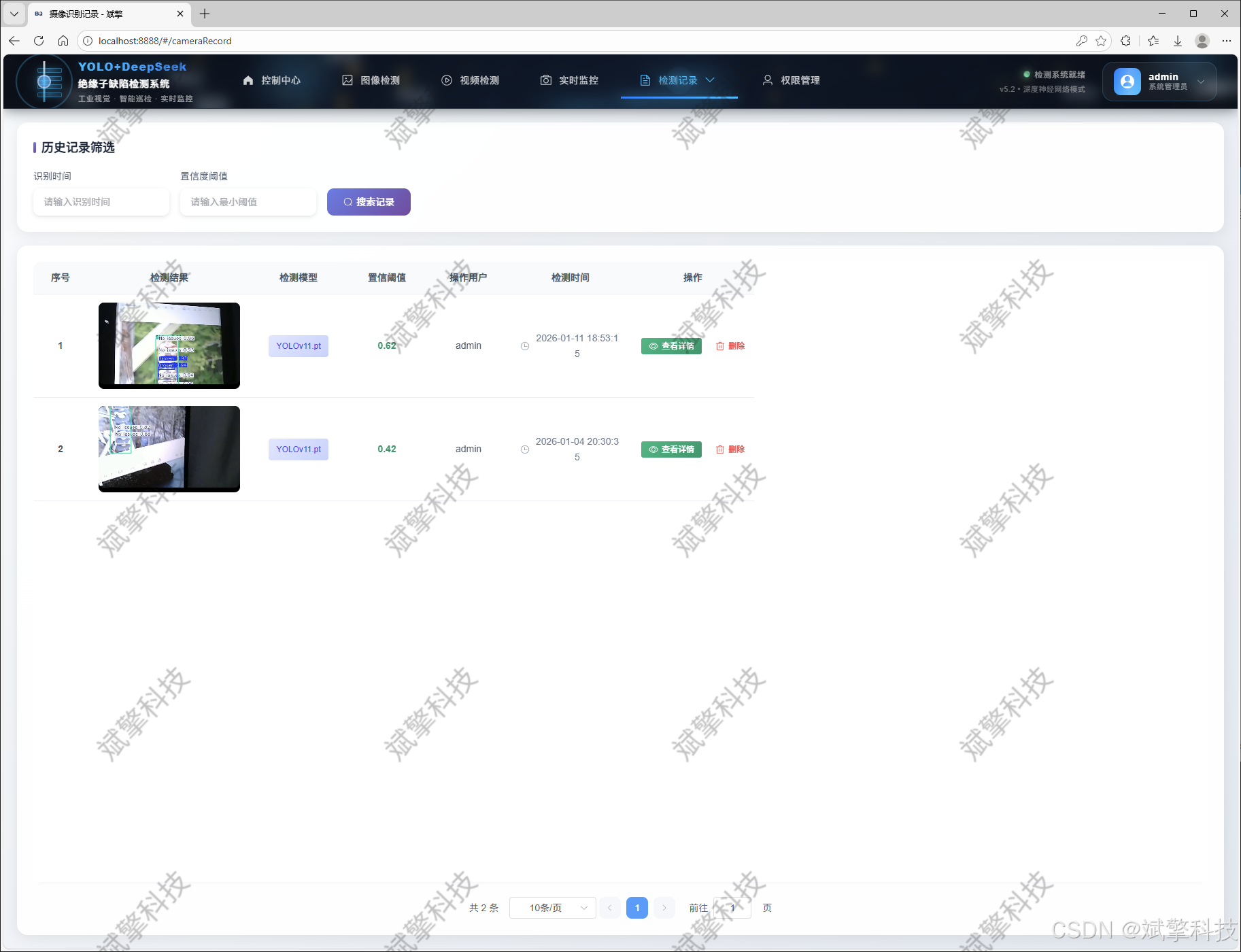
✅ 图片识别记录管理、视频识别记录管理和摄像头识别记录管理。
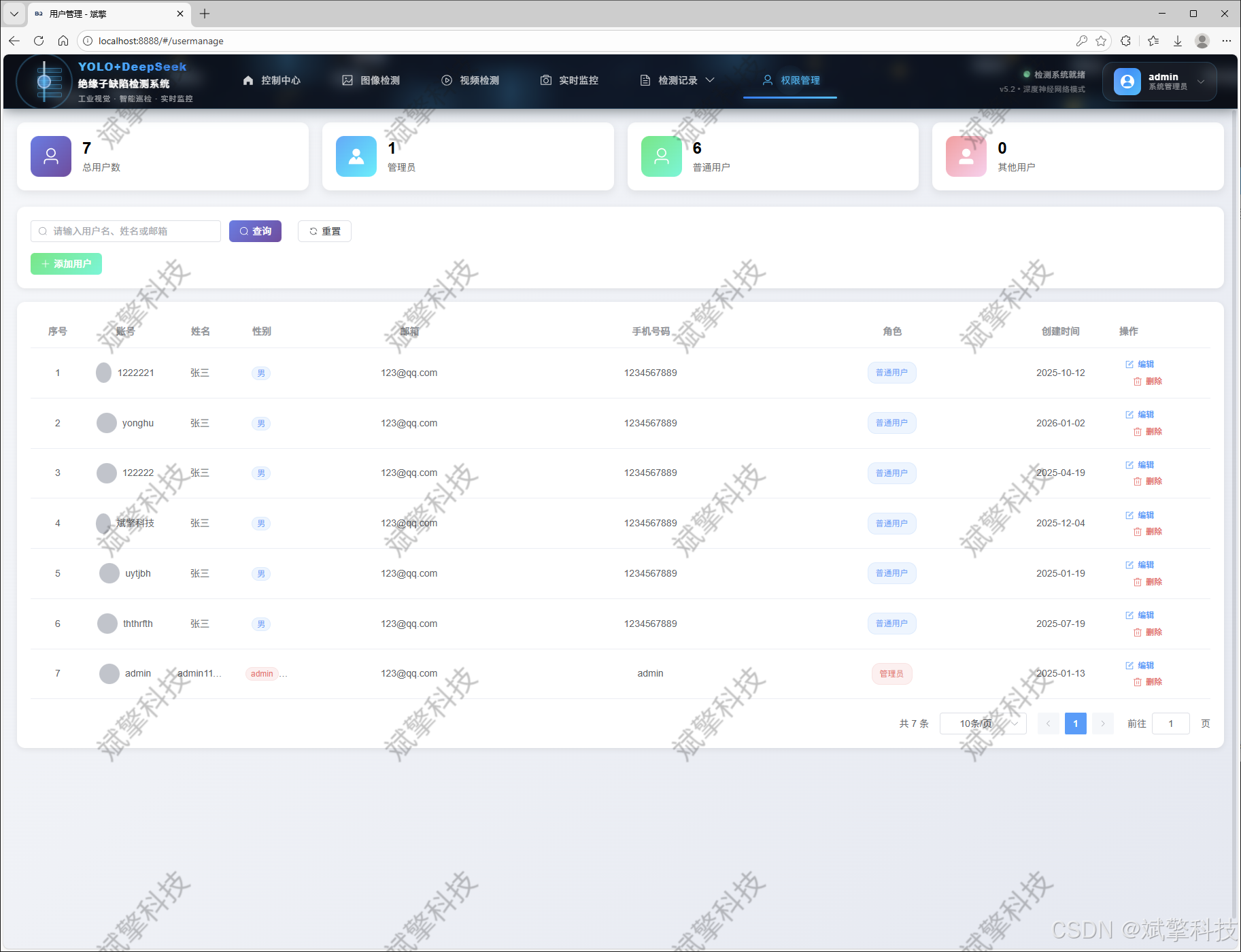
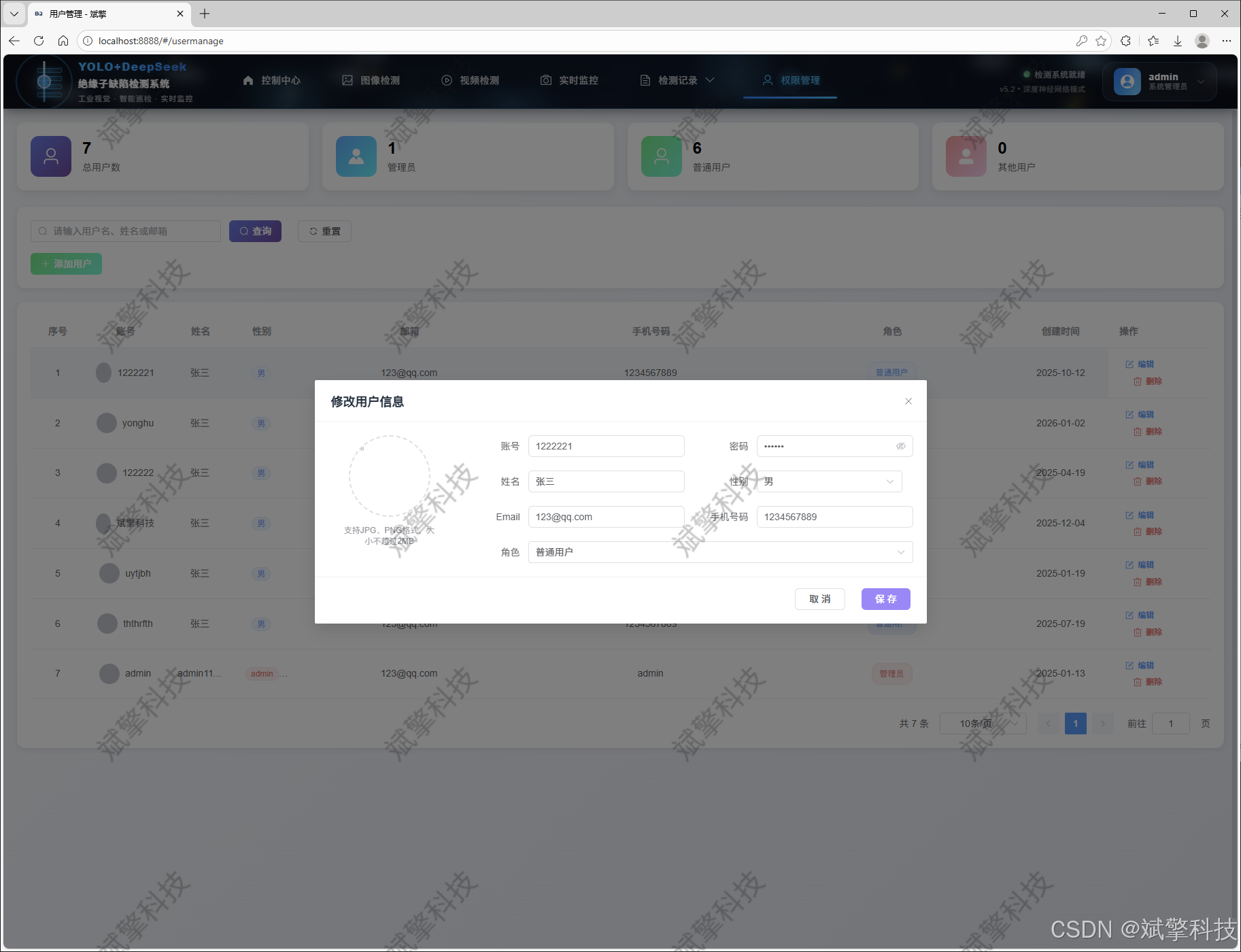
✅ 用户管理模块,管理员可以对用户进行增删改查。
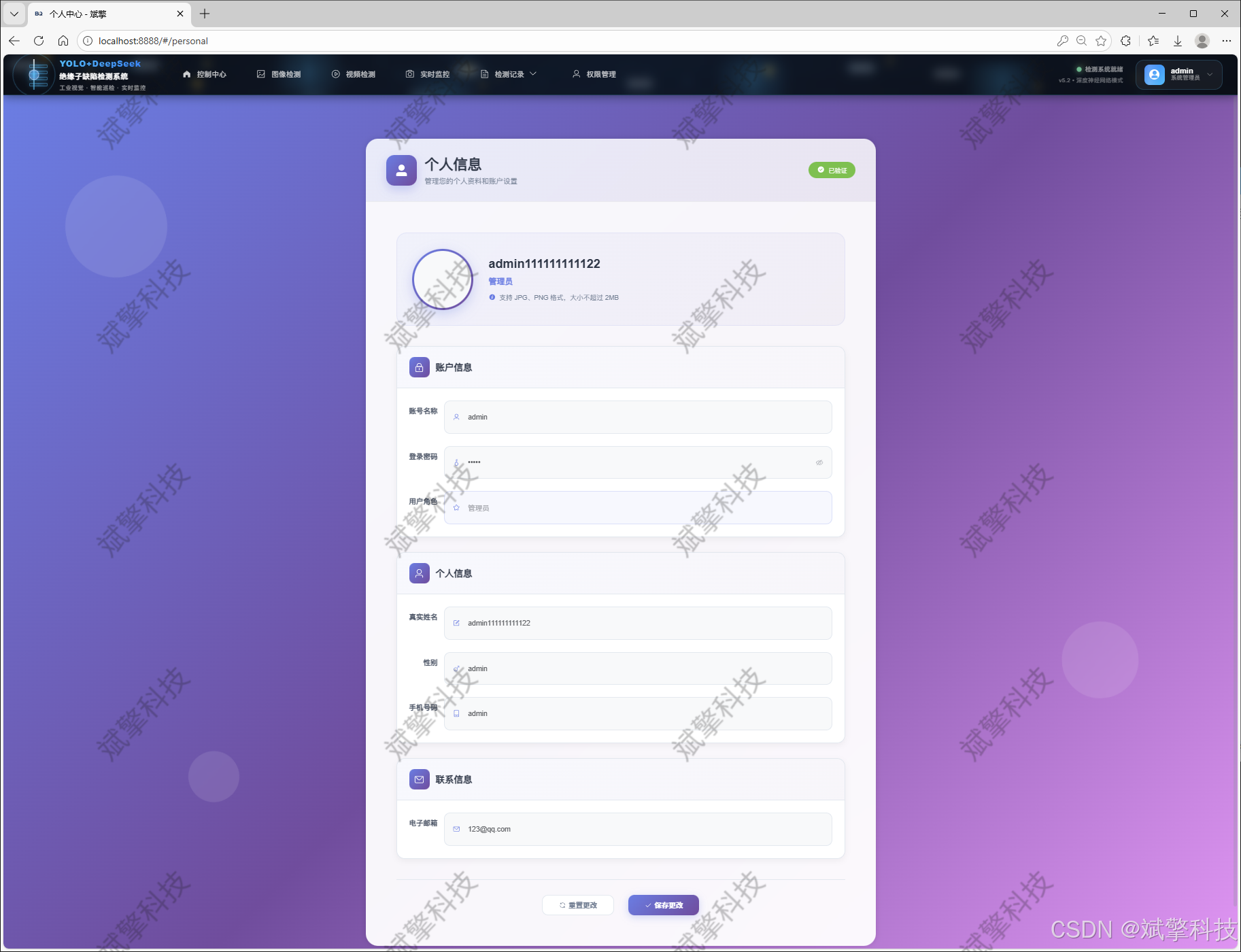
✅ 个人中心,可以修改自己的信息,密码姓名头像等等。
登录注册模块
可视化模块
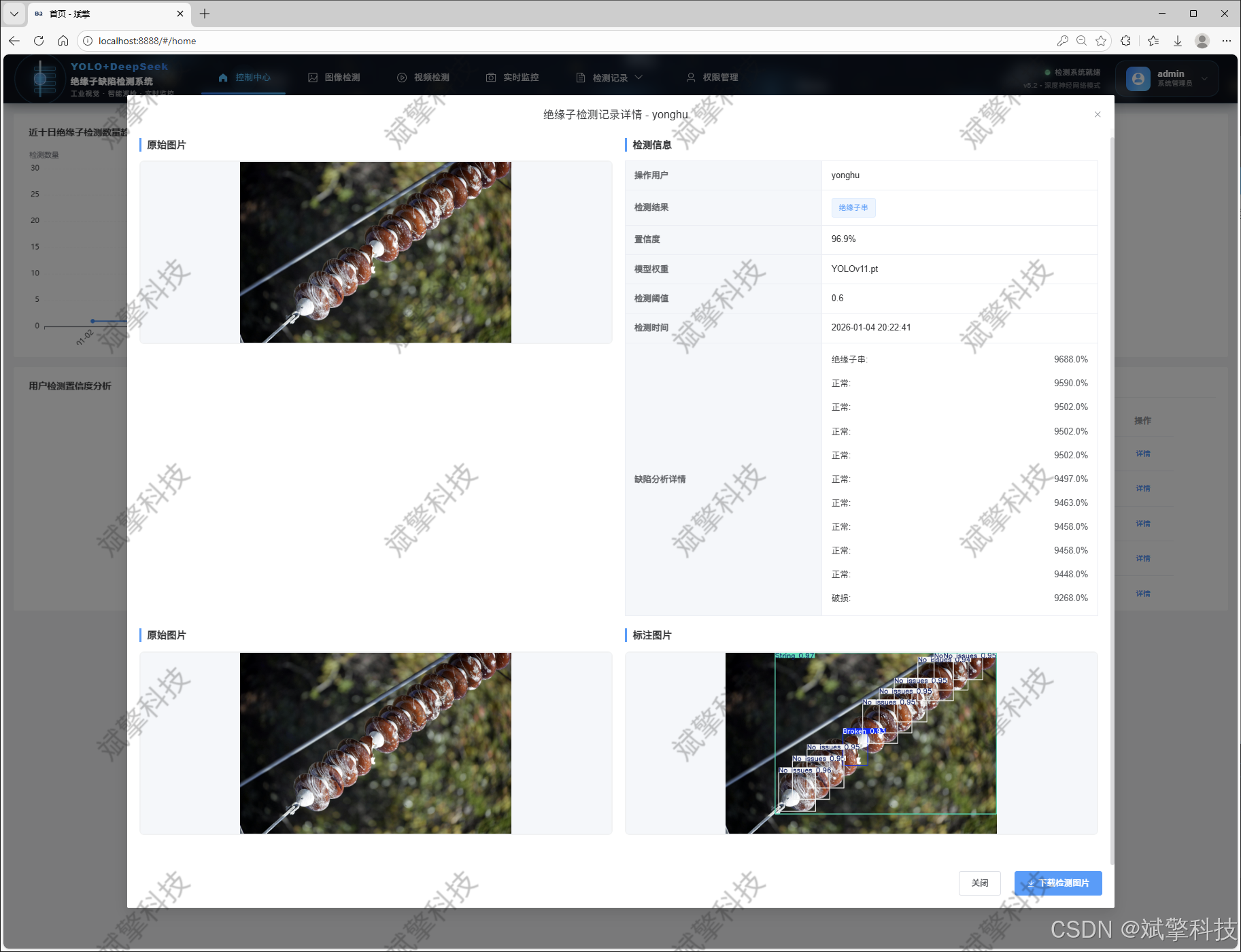
图像检测模块
-
YOLO模型集成 (v8/v10/v11/v12)
-
DeepSeek多模态分析
-
支持格式:JPG/PNG/MP4/RTSP
视频检测模块
实时检测模块
图片识别记录管理
视频识别记录管理
摄像头识别记录管理
用户管理模块
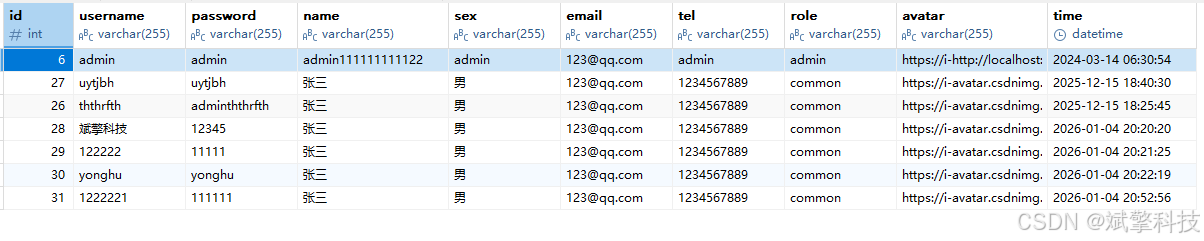
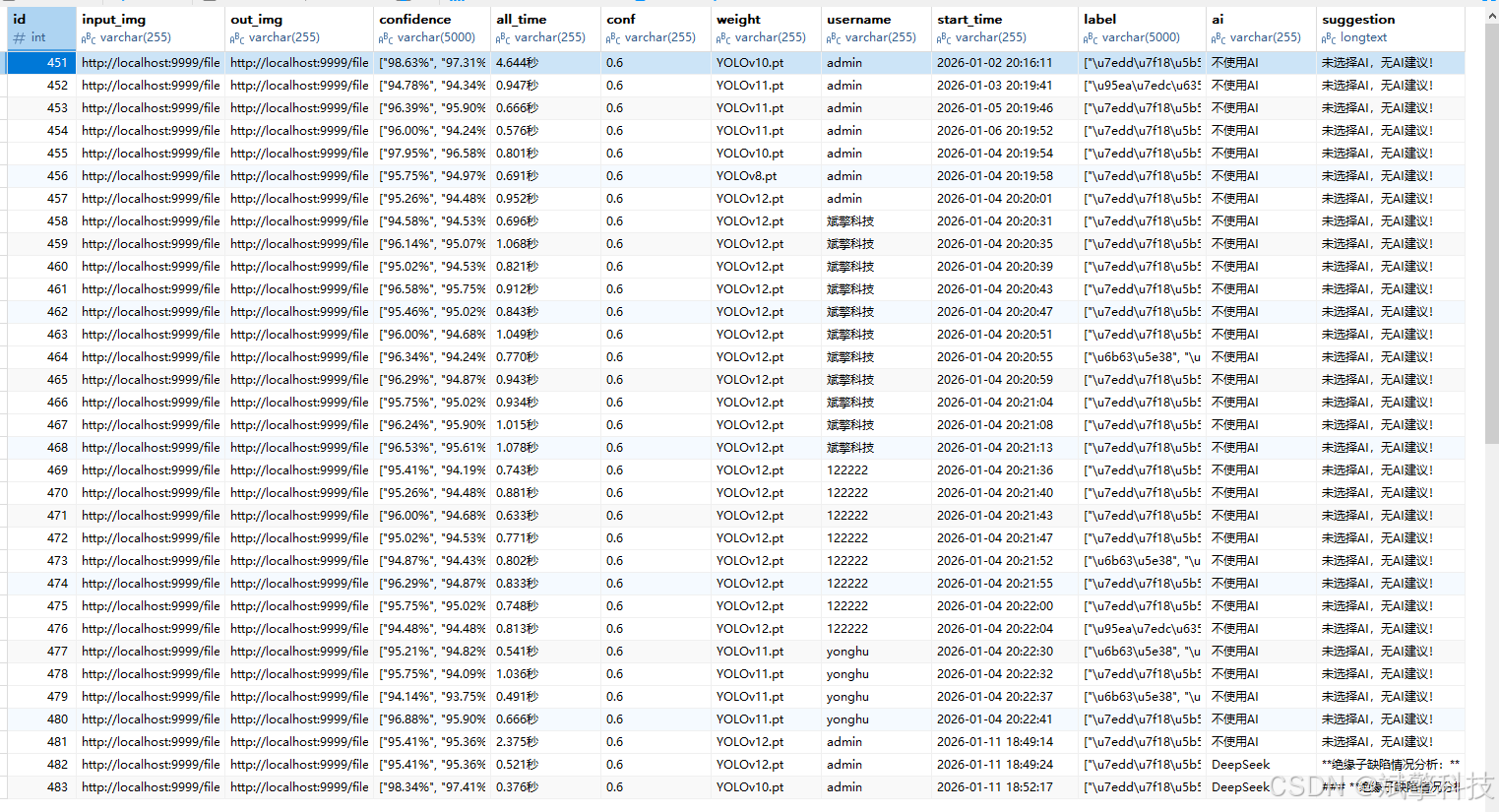
数据管理模块(MySQL表设计)
-
users- 用户信息表
-
imgrecords- 图片检测记录表
-
videorecords- 视频检测记录表

-
camerarecords- 摄像头检测记录表

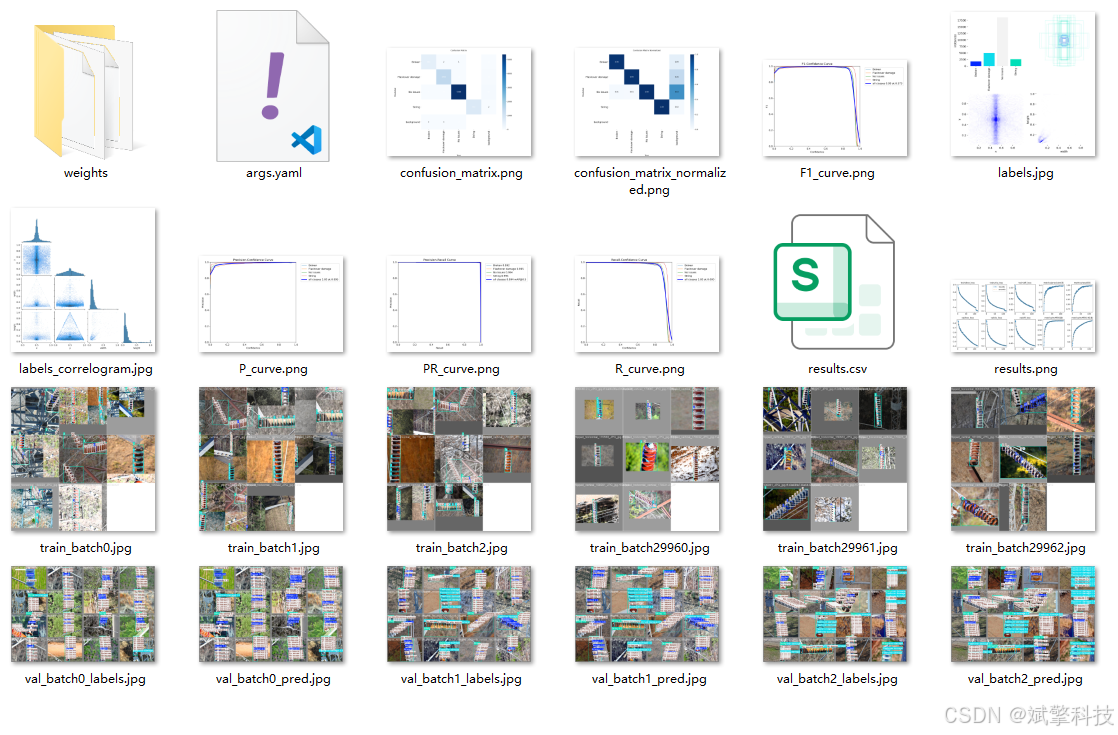
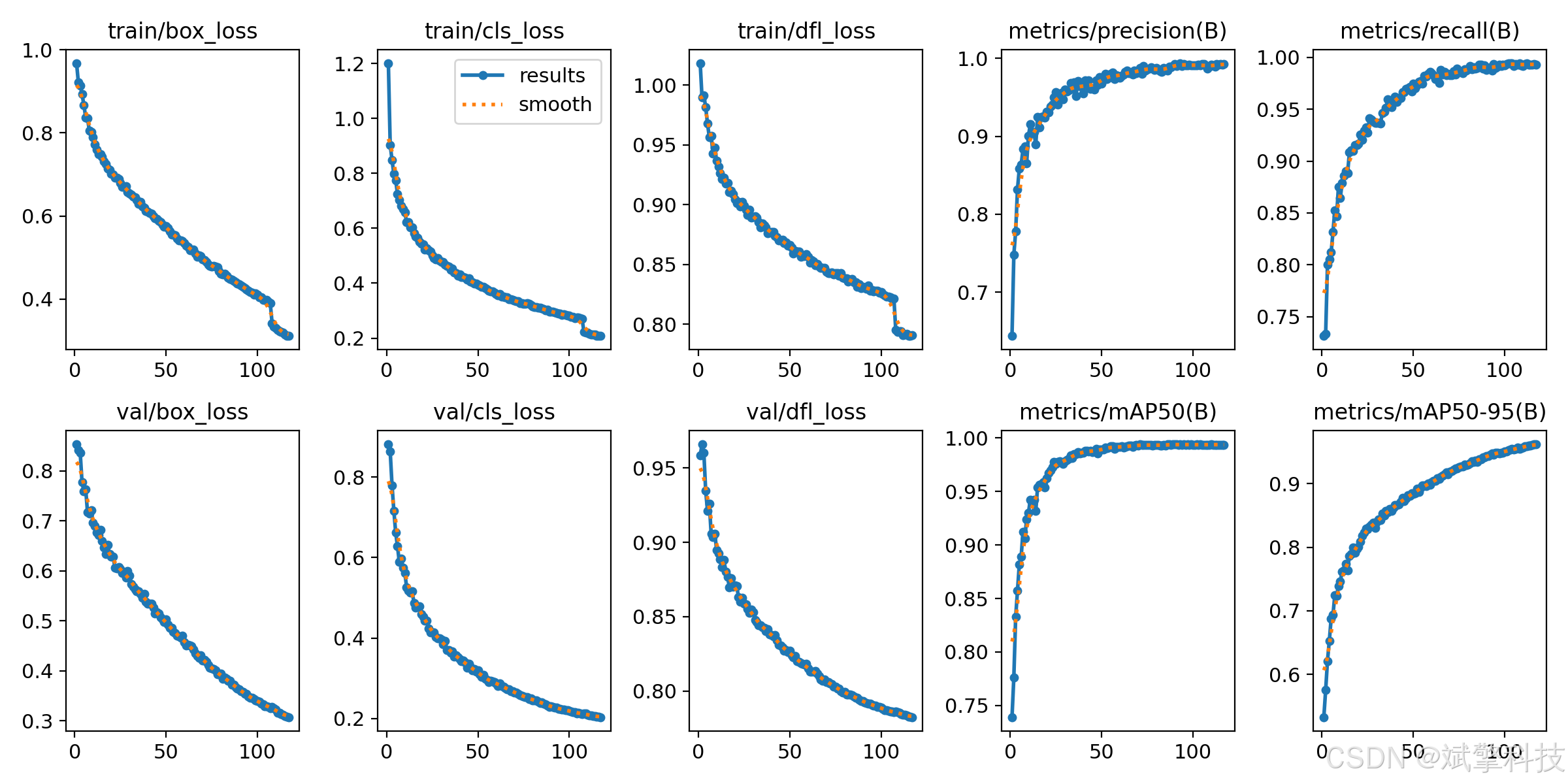
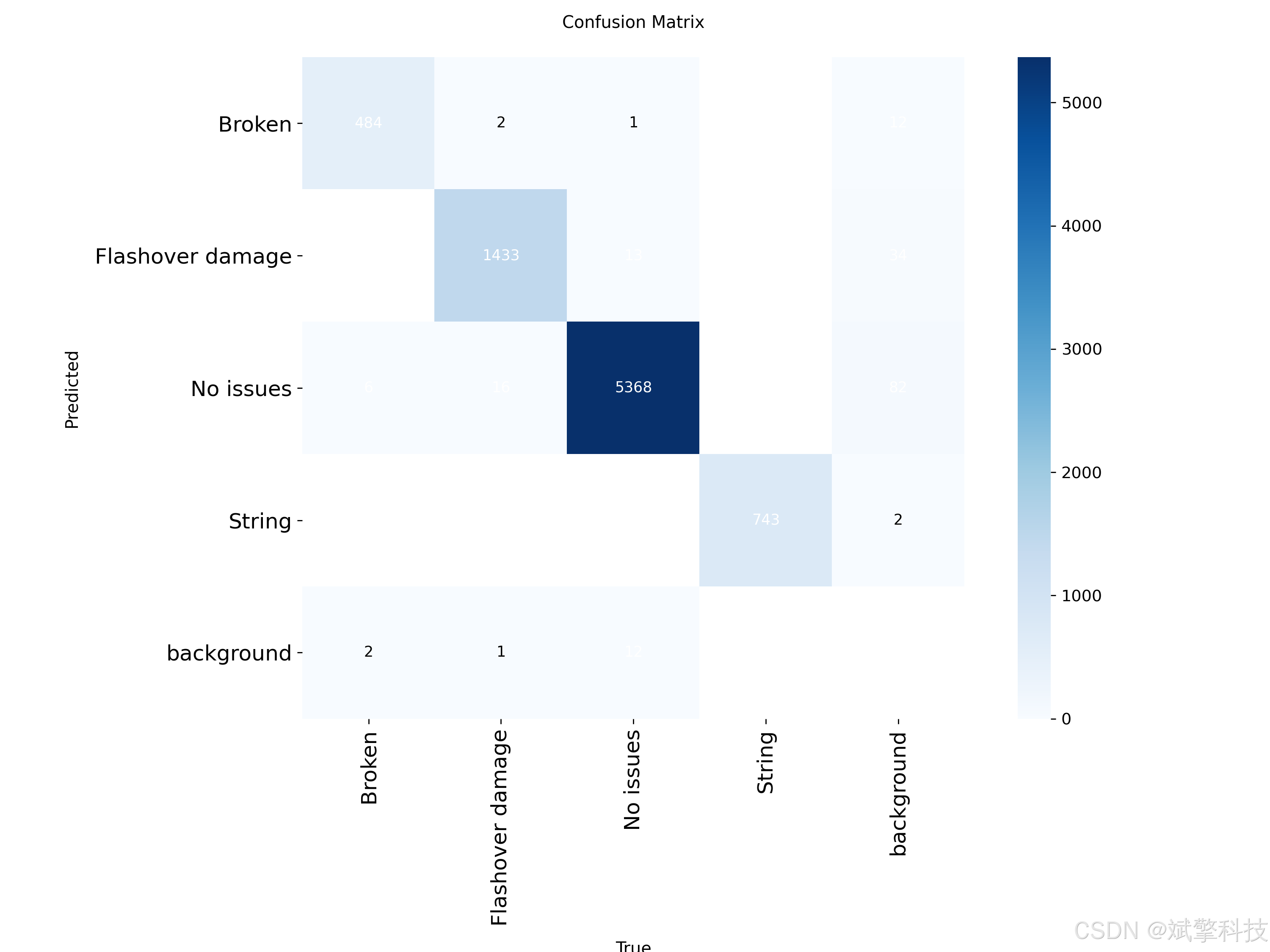
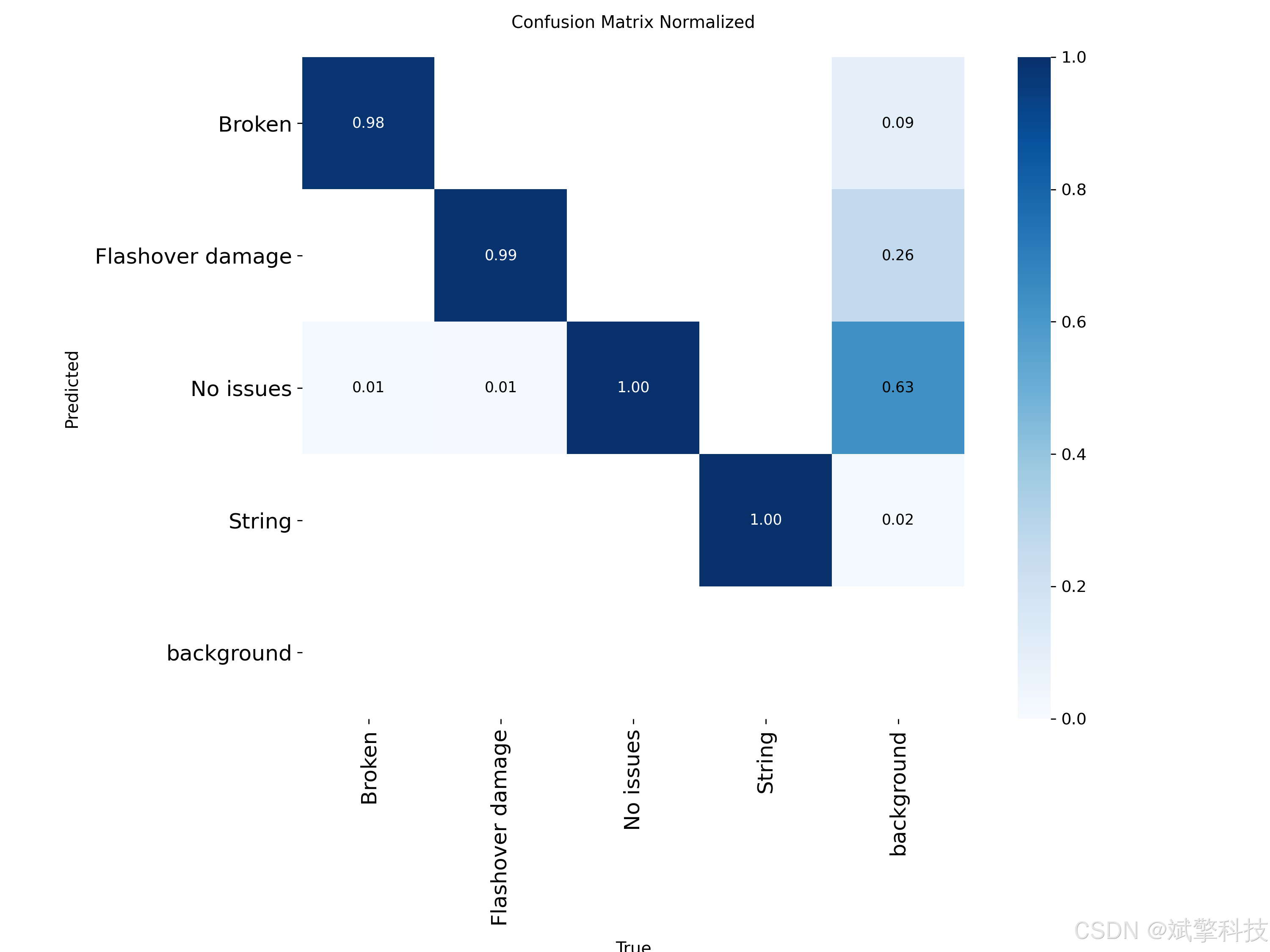
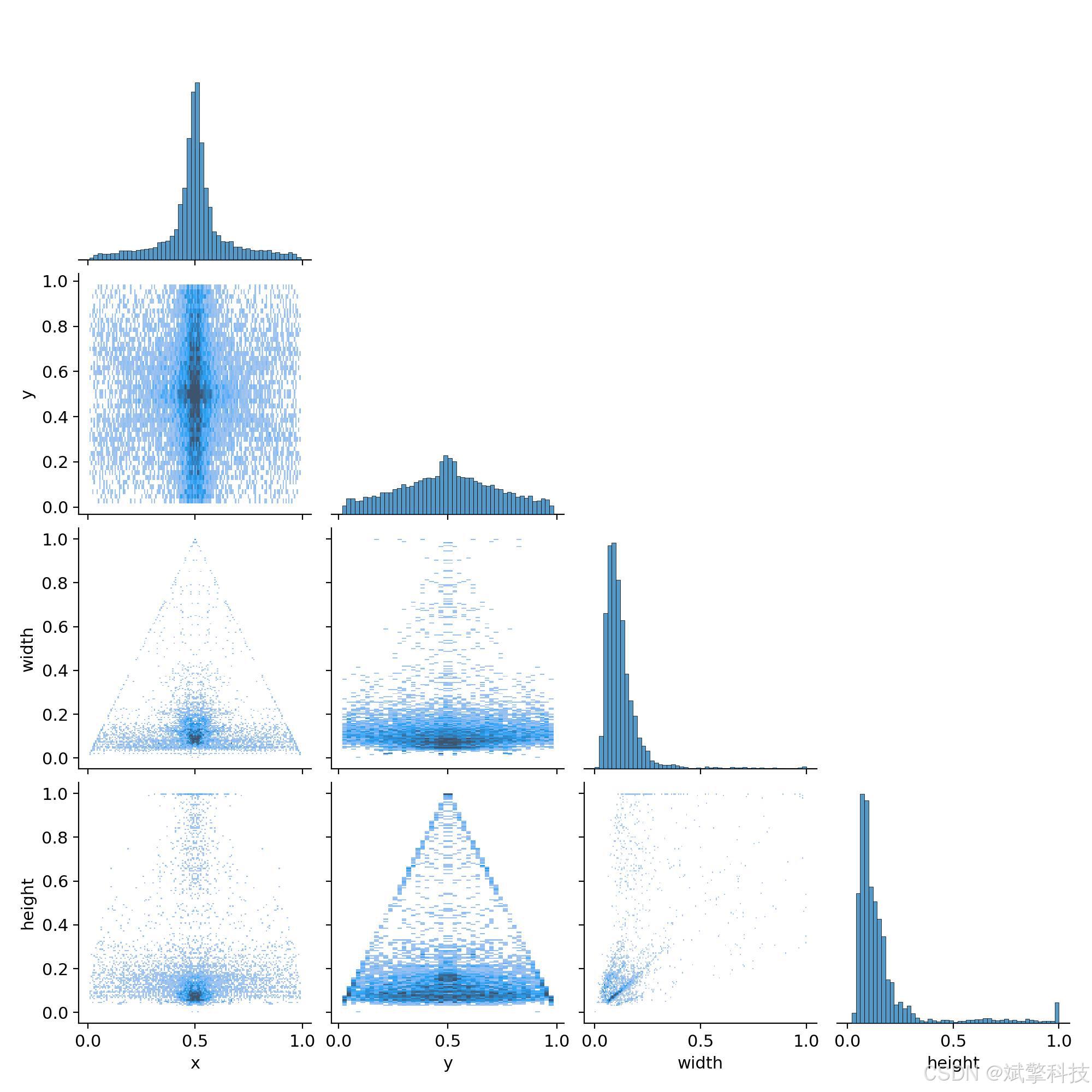
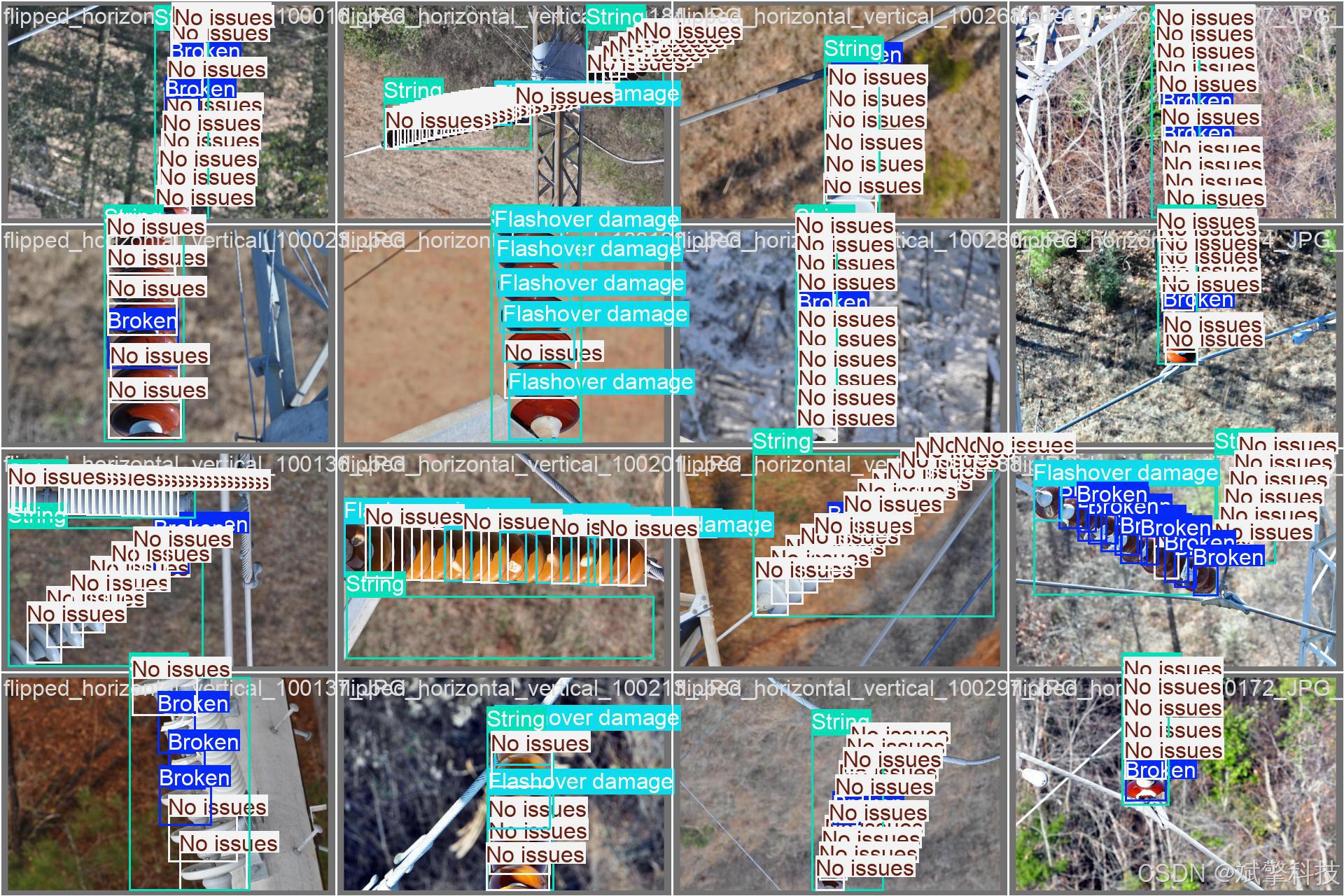
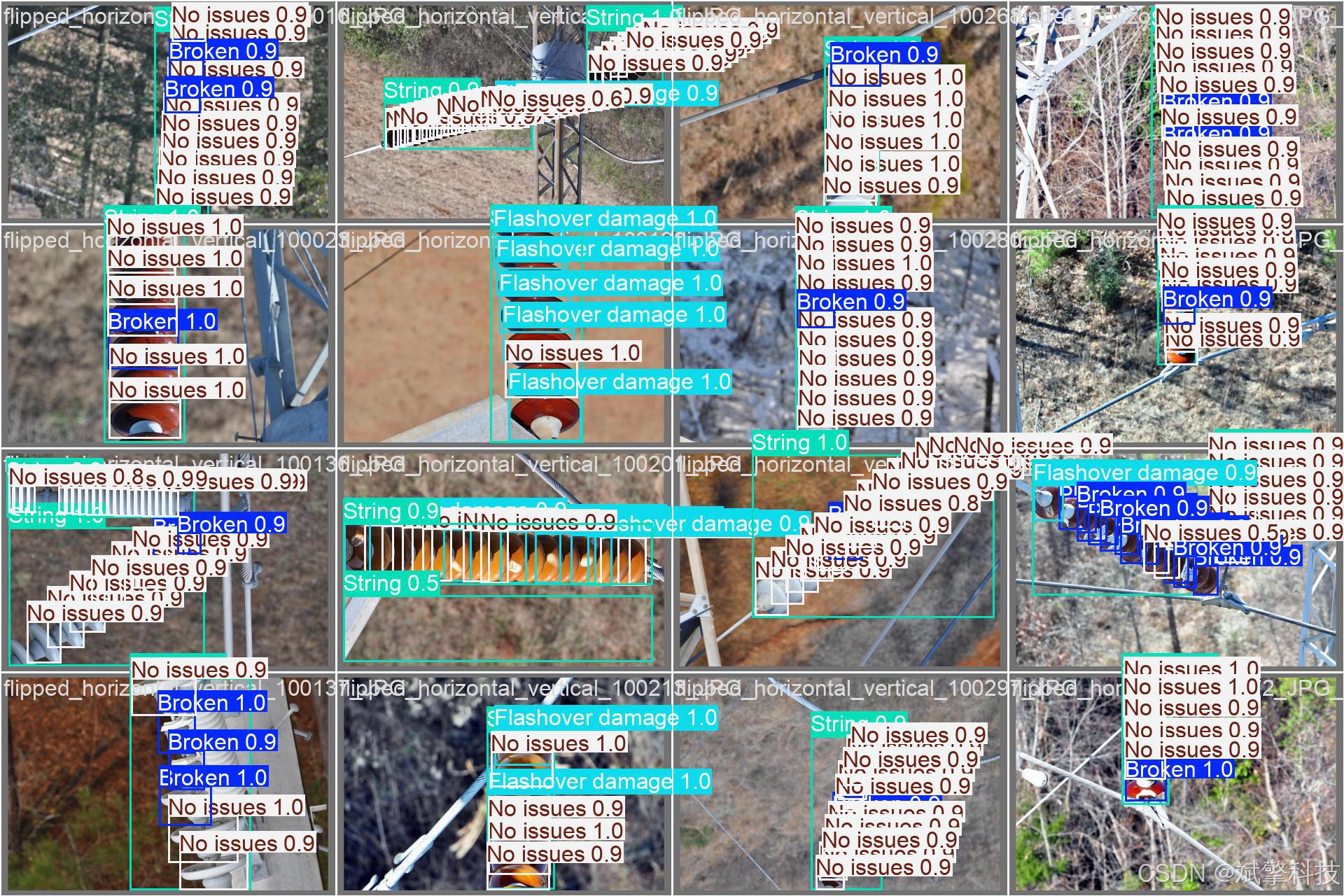
模型训练结果
#coding:utf-8
#根据实际情况更换模型
# yolon.yaml (nano):轻量化模型,适合嵌入式设备,速度快但精度略低。
# yolos.yaml (small):小模型,适合实时任务。
# yolom.yaml (medium):中等大小模型,兼顾速度和精度。
# yolob.yaml (base):基本版模型,适合大部分应用场景。
# yolol.yaml (large):大型模型,适合对精度要求高的任务。
from ultralytics import YOLO
model_path = 'pt/yolo12s.pt'
data_path = 'data.yaml'
if __name__ == '__main__':
model = YOLO(model_path)
results = model.train(data=data_path,
epochs=500,
batch=64,
device='0',
workers=0,
project='runs',
name='exp',
)
YOLO概述
YOLOv8
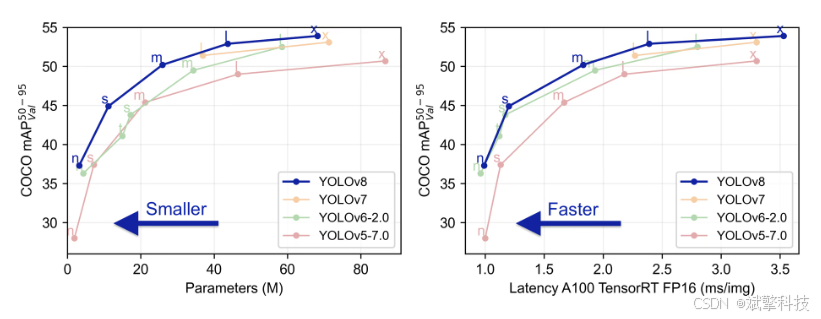
YOLOv8 由 Ultralytics 于 2023 年 1 月 10 日发布,在准确性和速度方面提供了尖端性能。基于先前 YOLO 版本的进步,YOLOv8 引入了新功能和优化,使其成为各种应用中目标检测任务的理想选择。
YOLOv8 的主要特性
- 高级骨干和颈部架构: YOLOv8 采用最先进的骨干和颈部架构,从而改进了特征提取和目标检测性能。
- 无锚点分离式 Ultralytics Head: YOLOv8 采用无锚点分离式 Ultralytics head,与基于锚点的方法相比,这有助于提高准确性并提高检测效率。
- 优化的准确性-速度权衡: YOLOv8 专注于在准确性和速度之间保持最佳平衡,适用于各种应用领域中的实时对象检测任务。
- 丰富的预训练模型: YOLOv8提供了一系列预训练模型,以满足各种任务和性能要求,使您更容易为特定用例找到合适的模型。
YOLOv10
YOLOv10 由 清华大学研究人员基于 Ultralytics Python构建,引入了一种新的实时目标检测方法,解决了先前 YOLO 版本中存在的后处理和模型架构缺陷。通过消除非极大值抑制 (NMS) 并优化各种模型组件,YOLOv10 以显著降低的计算开销实现了最先进的性能。大量实验表明,它在多个模型尺度上都具有卓越的精度-延迟权衡。
概述
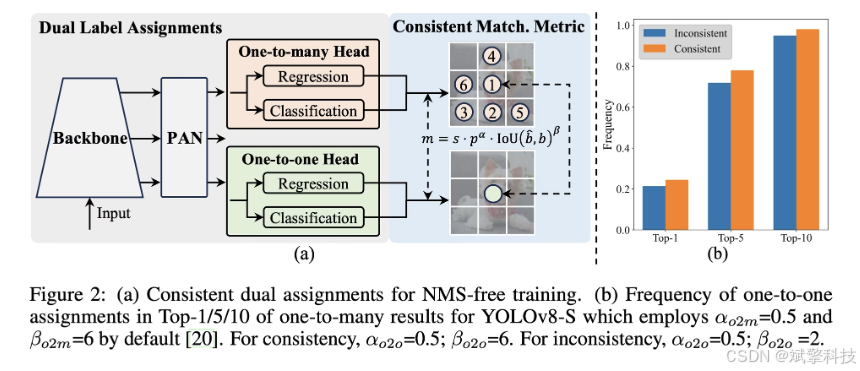
实时目标检测旨在以低延迟准确预测图像中的对象类别和位置。YOLO 系列因其在性能和效率之间的平衡而一直处于这项研究的前沿。然而,对 NMS 的依赖和架构效率低下阻碍了最佳性能。YOLOv10 通过引入用于无 NMS 训练的一致双重分配和整体效率-准确性驱动的模型设计策略来解决这些问题。
架构
YOLOv10 的架构建立在之前 YOLO 模型优势的基础上,同时引入了几项关键创新。该模型架构由以下组件组成:
- 骨干网络:负责特征提取,YOLOv10 中的骨干网络使用增强版的 CSPNet (Cross Stage Partial Network),以改善梯度流并减少计算冗余。
- Neck:Neck 的设计目的是聚合来自不同尺度的特征,并将它们传递到 Head。它包括 PAN(路径聚合网络)层,用于有效的多尺度特征融合。
- One-to-Many Head:在训练期间为每个对象生成多个预测,以提供丰富的监督信号并提高学习准确性。
- 一对一头部:在推理时为每个对象生成一个最佳预测,以消除对NMS的需求,从而降低延迟并提高效率。
主要功能
- 免NMS训练:利用一致的双重分配来消除对NMS的需求,从而降低推理延迟。
- 整体模型设计:从效率和准确性的角度对各种组件进行全面优化,包括轻量级分类 Head、空间通道解耦下采样和秩引导块设计。
- 增强的模型功能: 结合了大内核卷积和部分自注意力模块,以提高性能,而无需显着的计算成本。
YOLOv11
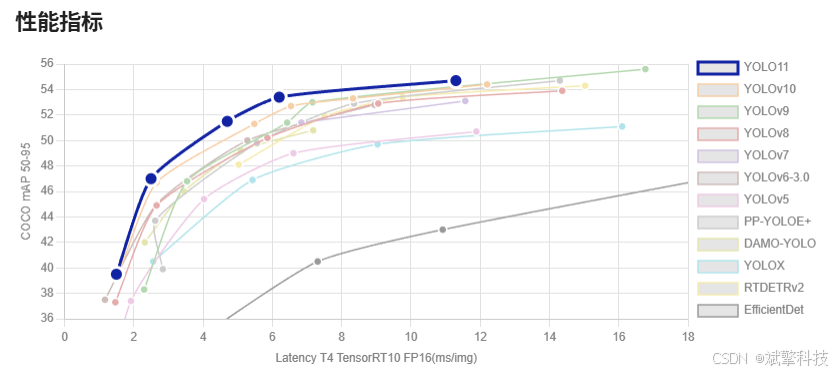
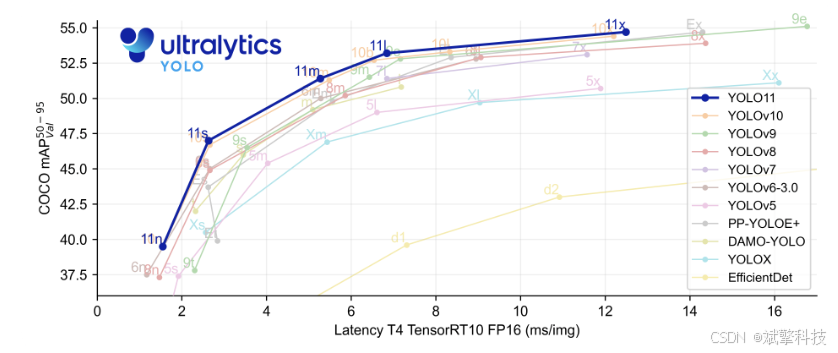
YOLO11 是 Ultralytics YOLO 系列实时目标检测器的最新迭代版本,它以前沿的精度、速度和效率重新定义了可能性。YOLO11 在之前 YOLO 版本的显著进步基础上,在架构和训练方法上进行了重大改进,使其成为各种计算机视觉任务的多功能选择。
主要功能
- 增强的特征提取: YOLO11 采用改进的 backbone 和 neck 架构,从而增强了特征提取能力,以实现更精确的目标检测和复杂的任务性能。
- 优化效率和速度: YOLO11 引入了改进的架构设计和优化的训练流程,从而提供更快的处理速度,并在精度和性能之间保持最佳平衡。
- 更高精度,更少参数: 随着模型设计的进步,YOLO11m 在 COCO 数据集上实现了更高的 平均精度均值(mAP),同时比 YOLOv8m 少用 22% 的参数,在不牺牲精度的情况下提高了计算效率。
- 跨环境的适应性: YOLO11 可以无缝部署在各种环境中,包括边缘设备、云平台和支持 NVIDIA GPU 的系统,从而确保最大的灵活性。
- 广泛支持的任务范围: 无论是目标检测、实例分割、图像分类、姿势估计还是旋转框检测 (OBB),YOLO11 都旨在满足各种计算机视觉挑战。
Ultralytics YOLO11 在其前代产品的基础上进行了多项重大改进。主要改进包括:
- 增强的特征提取: YOLO11 采用了改进的骨干网络和颈部架构,增强了特征提取能力,从而实现更精确的目标检测。
- 优化的效率和速度: 改进的架构设计和优化的训练流程提供了更快的处理速度,同时保持了准确性和性能之间的平衡。
- 更高精度,更少参数: YOLO11m 在 COCO 数据集上实现了更高的平均 精度均值 (mAP),同时比 YOLOv8m 少用 22% 的参数,在不牺牲精度的情况下提高了计算效率。
- 跨环境的适应性: YOLO11 可以部署在各种环境中,包括边缘设备、云平台和支持 NVIDIA GPU 的系统。
- 广泛支持的任务范围: YOLO11 支持各种计算机视觉任务,例如目标检测、实例分割、图像分类、姿势估计和旋转框检测 (OBB)。
YOLOv12
YOLO12引入了一种以注意力为中心的架构,它不同于之前YOLO模型中使用的传统基于CNN的方法,但仍保持了许多应用所需的实时推理速度。该模型通过在注意力机制和整体网络架构方面的新颖方法创新,实现了最先进的目标检测精度,同时保持了实时性能。尽管有这些优势,YOLO12仍然是一个社区驱动的版本,由于其沉重的注意力模块,可能表现出训练不稳定、内存消耗增加和CPU吞吐量较慢的问题,因此Ultralytics仍然建议将YOLO11用于大多数生产工作负载。
主要功能
- 区域注意力机制: 一种新的自注意力方法,可以有效地处理大型感受野。它将 特征图 分成 l 个大小相等的区域(默认为 4 个),水平或垂直,避免复杂的运算并保持较大的有效感受野。与标准自注意力相比,这大大降低了计算成本。
- 残差高效层聚合网络(R-ELAN):一种基于 ELAN 的改进的特征聚合模块,旨在解决优化挑战,尤其是在更大规模的以注意力为中心的模型中。R-ELAN 引入:
- 具有缩放的块级残差连接(类似于层缩放)。
- 一种重新设计的特征聚合方法,创建了一个类似瓶颈的结构。
- 优化的注意力机制架构:YOLO12 精简了标准注意力机制,以提高效率并与 YOLO 框架兼容。这包括:
- 使用 FlashAttention 来最大限度地减少内存访问开销。
- 移除位置编码,以获得更简洁、更快速的模型。
- 调整 MLP 比率(从典型的 4 调整到 1.2 或 2),以更好地平衡注意力和前馈层之间的计算。
- 减少堆叠块的深度以改进优化。
- 利用卷积运算(在适当的情况下)以提高其计算效率。
- 在注意力机制中添加一个7x7可分离卷积(“位置感知器”),以隐式地编码位置信息。
- 全面的任务支持: YOLO12 支持一系列核心计算机视觉任务:目标检测、实例分割、图像分类、姿势估计和旋转框检测 (OBB)。
- 增强的效率: 与许多先前的模型相比,以更少的参数实现了更高的准确率,从而证明了速度和准确率之间更好的平衡。
- 灵活部署: 专为跨各种平台部署而设计,从边缘设备到云基础设施。
主要改进
-
增强的 特征提取:
- 区域注意力: 有效处理大型感受野,降低计算成本。
- 优化平衡: 改进了注意力和前馈网络计算之间的平衡。
- R-ELAN:使用 R-ELAN 架构增强特征聚合。
-
优化创新:
- 残差连接:引入具有缩放的残差连接以稳定训练,尤其是在较大的模型中。
- 改进的特征集成:在 R-ELAN 中实现了一种改进的特征集成方法。
- FlashAttention: 整合 FlashAttention 以减少内存访问开销。
-
架构效率:
- 减少参数:与之前的许多模型相比,在保持或提高准确性的同时,实现了更低的参数计数。
- 简化的注意力机制:使用简化的注意力实现,避免了位置编码。
- 优化的 MLP 比率:调整 MLP 比率以更有效地分配计算资源。
前端代码展示
登录界面一小部分代码:
<template>
<div class="login-container">
<!-- 工业检测背景 -->
<div class="inspection-background">
<!-- 电路板网格 -->
<div class="pcb-grid">
<div class="grid-line horizontal" v-for="n in 15" :key="`h-${n}`" :style="getGridLineStyle('h', n)"></div>
<div class="grid-line vertical" v-for="n in 20" :key="`v-${n}`" :style="getGridLineStyle('v', n)"></div>
<div class="grid-node" v-for="n in 40" :key="`node-${n}`" :style="getGridNodeStyle(n)"></div>
</div>
<!-- 检测扫描线 -->
<div class="scan-lines">
<div class="scan-line" v-for="n in 5" :key="`scan-${n}`" :style="getScanLineStyle(n)">
<div class="scan-glow"></div>
</div>
</div>
<!-- 绝缘子轮廓 -->
<div class="insulator-outlines">
<div class="insulator" v-for="n in 8" :key="`insulator-${n}`" :style="getInsulatorStyle(n)">
<div class="insulator-disc" v-for="disc in 5" :key="`disc-${n}-${disc}`"></div>
<div class="defect-marker" v-if="Math.random() > 0.7"></div>
</div>
</div>
<!-- 数据流 -->
<div class="data-stream">
<div class="stream-line" v-for="n in 12" :key="`stream-${n}`" :style="getStreamStyle(n)">
<span v-for="i in 20" :key="`data-${n}-${i}`">
{{ Math.random() > 0.5 ? '1' : '0' }}
</span>
</div>
</div>
<!-- 检测热点 -->
<div class="detection-hotspots">
<div class="hotspot" v-for="n in 15" :key="`hotspot-${n}`" :style="getHotspotStyle(n)">
<div class="hotspot-pulse"></div>
</div>
</div>
</div>
<!-- 登录主容器 -->
<div class="login-main">
<!-- 检测系统容器 -->
<div class="system-container">
<div class="system-border">
<div class="corner corner-tl"></div>
<div class="corner corner-tr"></div>
<div class="corner corner-bl"></div>
<div class="corner corner-br"></div>
</div>
<div class="system-glow"></div>
<!-- 系统标志 -->
<div class="system-brand">
<div class="brand-icon">
<div class="insulator-icon">
<div class="icon-discs">
<div class="disc" v-for="i in 4" :key="`disc-${i}`"></div>
</div>
<div class="icon-rod"></div>
<div class="ai-core">
<div class="core-pulse"></div>
</div>
</div>
<div class="icon-ring"></div>
</div>
<div class="brand-text">
<h1 class="system-title">
<span class="yolo-text">YOLO+DeepSeek</span>
<span class="system-name">绝缘子缺陷检测系统</span>
</h1>
<p class="system-subtitle">工业视觉 · 智能巡检 · 实时监控</p>
<p class="system-version">v5.2 · 深度神经网络版本</p>
</div>
</div>
<!-- 登录面板 -->
<div class="login-panel">
<div class="panel-border">
<div class="border-line top"></div>
<div class="border-line bottom"></div>
</div>
<div class="panel-header">
<div class="header-indicator">
<div class="indicator-dot active"></div>
<div class="indicator-dot"></div>
<div class="indicator-dot"></div>
</div>
<h2>系统登录认证</h2>
<div class="header-status">
<span class="status-text">在线</span>
<div class="status-light"></div>
</div>
</div>
<div class="panel-content">
<el-form :model="ruleForm" :rules="registerRules" ref="ruleFormRef">
<!-- 用户名输入 -->
<el-form-item prop="username">
<div class="input-field">
<div class="field-label">
<div class="label-icon">
<div class="icon-pulse"></div>
</div>
<span>操作员ID</span>
</div>
<el-input
v-model="ruleForm.username"
placeholder="请输入操作员识别码"
class="tech-input"
size="large"
@focus="onInputFocus"
@blur="onInputBlur"
/>
<div class="field-underline"></div>
</div>
</el-form-item>
<!-- 密码输入 -->
<el-form-item prop="password">
<div class="input-field">
<div class="field-label">
<div class="label-icon">
<div class="icon-lock"></div>
</div>
<span>访问密钥</span>
</div>
<el-input
v-model="ruleForm.password"
type="password"
placeholder="请输入安全访问密钥"
show-password
class="tech-input"
size="large"
@focus="onInputFocus"
@blur="onInputBlur"
/>
<div class="field-underline"></div>
</div>
</el-form-item>
<!-- 登录按钮 -->
<el-form-item>
<div class="login-action">
<el-button
type="primary"
class="detect-btn"
@click="submitForm(ruleFormRef)"
@mouseenter="onBtnHover"
@mouseleave="onBtnLeave"
>
<div class="btn-content">
<div class="btn-icon">
<div class="scan-animation"></div>
</div>
<div class="btn-text">
<span class="text-main">启动检测系统</span>
<span class="text-sub">INITIALIZING DETECTION</span>
</div>
</div>
<div class="btn-glow"></div>
<div class="btn-pulse"></div>
</el-button>
<div class="system-stats">
<div class="stat-item">
<span class="stat-label">检测精度</span>
<span class="stat-value">99.4%</span>
</div>
<div class="stat-divider"></div>
<div class="stat-item">
<span class="stat-label">响应时间</span>
<span class="stat-value">24ms</span>
</div>
</div>
</div>
</el-form-item>
</el-form>
<!-- 系统选项 -->
<div class="system-options">
<div class="option-group">
<router-link to="/register" class="option-item">
<div class="option-icon">
<div class="icon-add"></div>
</div>
<span>注册新账户</span>
<div class="option-trail"></div>
</router-link>
</div>
<div class="system-status">
<div class="status-item">
<div class="status-light active"></div>
<span>检测服务正常</span>
</div>
<div class="status-item">
<div class="status-light"></div>
<span>数据同步中...</span>
</div>
</div>
</div>
</div>
</div>
<!-- 检测信息 -->
<div class="detection-info">
<div class="info-header">
<div class="header-line"></div>
<h3>实时检测状态</h3>
<div class="header-line"></div>
</div>
<div class="info-grid">
<div class="info-item">
<div class="info-icon">
<div class="icon-camera"></div>
</div>
</div>
<div class="info-item">
<div class="info-icon">
<div class="icon-detection"></div>
</div>
<div class="info-content">
</div>
</div>
<div class="info-item">
<div class="info-icon">
<div class="icon-alert"></div>
</div>
</div>
</div>
</div>
</div>
</div>
<!-- 浮动元素 -->
<div class="floating-elements">
<!-- 检测坐标 -->
<div class="detection-coordinates">
<div class="coordinate" v-for="n in 6" :key="`coord-${n}`" :style="getCoordStyle(n)">
{{ `X:${Math.floor(Math.random()*1000)} Y:${Math.floor(Math.random()*1000)}` }}
</div>
</div>
<!-- 参数标签 -->
<div class="parameter-labels">
<div class="parameter" v-for="n in 10" :key="`param-${n}`" :style="getParamStyle(n)">
{{ ['置信度','IoU','FPS','分辨率','阈值','延迟','精度','召回','F1','AP'][n-1] }}: {{ (Math.random()*100).toFixed(1) }}
</div>
</div>
</div>
</div>
</template>
<script lang="ts" setup>
import { reactive, ref, computed, onMounted } from 'vue';
import { useRoute, useRouter } from 'vue-router';
import { ElMessage } from 'element-plus';
import { useI18n } from 'vue-i18n';
import Cookies from 'js-cookie';
import { storeToRefs } from 'pinia';
import { useThemeConfig } from '/@/stores/themeConfig';
import { initFrontEndControlRoutes } from '/@/router/frontEnd';
import { initBackEndControlRoutes } from '/@/router/backEnd';
import { Session } from '/@/utils/storage';
import { formatAxis } from '/@/utils/formatTime';
import { NextLoading } from '/@/utils/loading';
import type { FormInstance, FormRules } from 'element-plus';
import request from '/@/utils/request';
// 定义变量内容
const { t } = useI18n();
const storesThemeConfig = useThemeConfig();
const { themeConfig } = storeToRefs(storesThemeConfig);
const route = useRoute();
const router = useRouter();
const formSize = ref('default');
const ruleFormRef = ref<FormInstance>();
// 定义表单数据
const ruleForm = reactive({
username: '',
password: '',
});
// 校验规则
const registerRules = reactive<FormRules>({
username: [
{ required: true, message: '请输入操作员识别码', trigger: 'blur' },
{ min: 3, max: 20, message: '长度在3-20个字符', trigger: 'blur' },
],
password: [
{ required: true, message: '请输入访问密钥', trigger: 'blur' },
{ min: 3, max: 30, message: '长度在6-30个字符', trigger: 'blur' },
],
});
// 背景样式生成函数
const getGridLineStyle = (type: 'h' | 'v', index: number) => {
if (type === 'h') {
return {
top: `${(index / 15) * 100}%`,
width: '100%',
animationDelay: `${index * 0.1}s`
};
} else {
return {
left: `${(index / 20) * 100}%`,
height: '100%',
animationDelay: `${index * 0.05}s`
};
}
};
const getGridNodeStyle = (index: number) => {
const left = Math.random() * 100;
const top = Math.random() * 100;
const size = 2 + Math.random() * 4;
const duration = 2 + Math.random() * 3;
return {
left: `${left}%`,
top: `${top}%`,
width: `${size}px`,
height: `${size}px`,
animationDuration: `${duration}s`,
animationDelay: `${Math.random() * 2}s`
};
};
const getScanLineStyle = (index: number) => {
const left = Math.random() * 100;
const duration = 3 + Math.random() * 2;
const delay = index * 0.5;
return {
left: `${left}%`,
animationDuration: `${duration}s`,
animationDelay: `${delay}s`
};
};
const getInsulatorStyle = (index: number) => {
const left = Math.random() * 100;
const top = Math.random() * 100;
const scale = 0.3 + Math.random() * 0.5;
const rotation = Math.random() * 360;
return {
left: `${left}%`,
top: `${top}%`,
transform: `scale(${scale}) rotate(${rotation}deg)`
};
};
const getStreamStyle = (index: number) => {
const left = Math.random() * 100;
const duration = 8 + Math.random() * 12;
const delay = Math.random() * 5;
const speed = 0.5 + Math.random() * 1.5;
return {
left: `${left}%`,
animationDuration: `${duration / speed}s`,
animationDelay: `${delay}s`,
animationTimingFunction: `steps(${Math.floor(10 + Math.random() * 20)}, end)`
};
};
const getHotspotStyle = (index: number) => {
const left = Math.random() * 100;
const top = Math.random() * 100;
const size = 4 + Math.random() * 8;
const duration = 1.5 + Math.random() * 2;
return {
left: `${left}%`,
top: `${top}%`,
width: `${size}px`,
height: `${size}px`,
animationDuration: `${duration}s`,
animationDelay: `${Math.random() * 3}s`
};
};
const getCoordStyle = (index: number) => {
const left = Math.random() * 100;
const duration = 15 + Math.random() * 20;
const delay = Math.random() * 5;
return {
left: `${left}%`,
animationDuration: `${duration}s`,
animationDelay: `${delay}s`,
fontSize: `${10 + Math.random() * 6}px`
};
};
const getParamStyle = (index: number) => {
const left = Math.random() * 100;
const top = Math.random() * 100;
const duration = 20 + Math.random() * 25;
const delay = Math.random() * 8;
return {
left: `${left}%`,
top: `${top}%`,
animationDuration: `${duration}s`,
animationDelay: `${delay}s`,
opacity: 0.05 + Math.random() * 0.15
};
};
后端代码展示
详细功能展示视频
基于YOLO和DeepSeek的绝缘子损坏识别检测系统(千问大模型+web+YOLOv8/YOLOv10/YOLOv11/YOLOv12+python)_哔哩哔哩_bilibili
基于YOLO和DeepSeek的绝缘子损坏识别检测系统(千问大模型+web+YOLOv8/YOLOv10/YOLOv11/YOLOv12+python)_哔哩哔哩_bilibili![]() https://www.bilibili.com/video/BV1RhfoBeEyy/?spm_id_from=333.999.0.0&vd_source=549d0b4e2b8999929a61a037fcce3b0fhttps://www.bilibili.com/video/BV1RhfoBeEyy/
https://www.bilibili.com/video/BV1RhfoBeEyy/?spm_id_from=333.999.0.0&vd_source=549d0b4e2b8999929a61a037fcce3b0fhttps://www.bilibili.com/video/BV1RhfoBeEyy/

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献154条内容
已为社区贡献154条内容

所有评论(0)