Matlab/Simulink 半车主动悬架建模:ADRC 与 PID 的碰撞
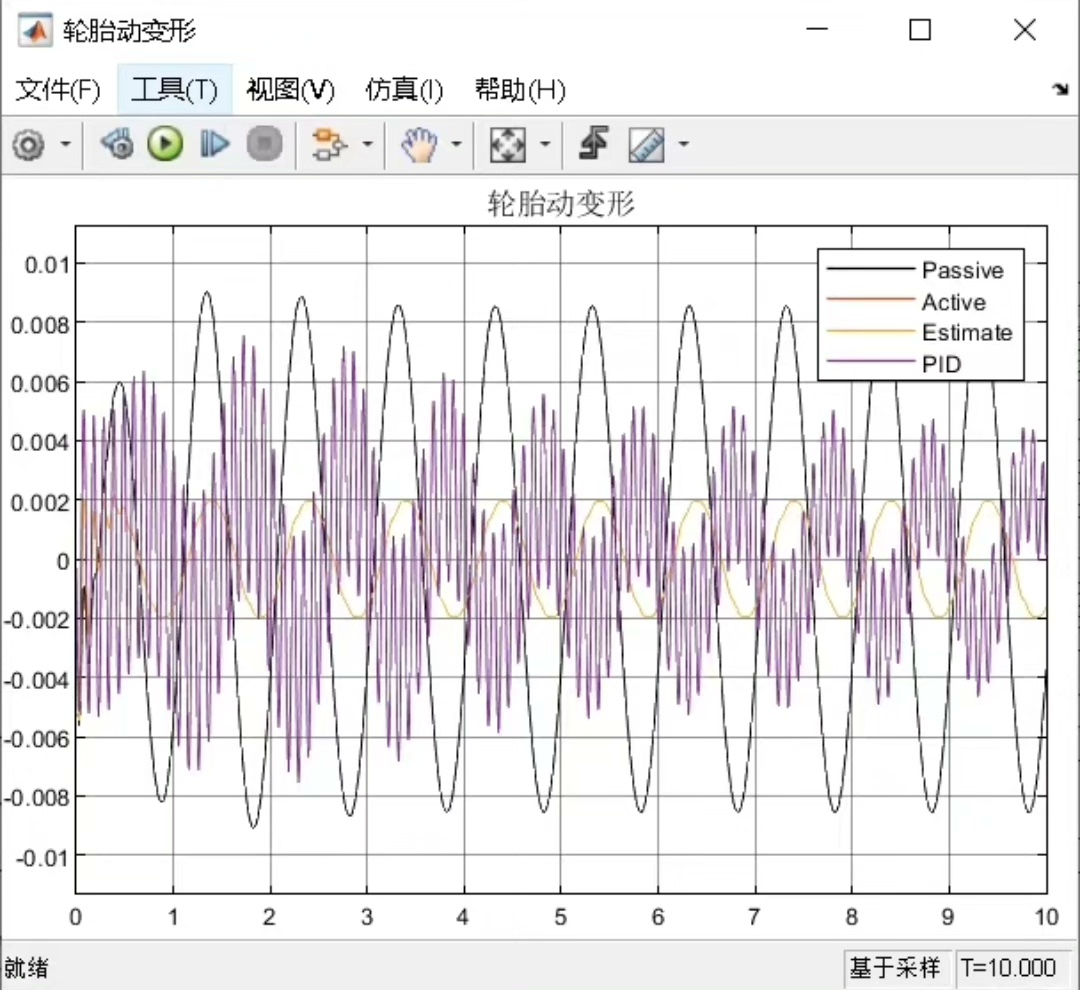
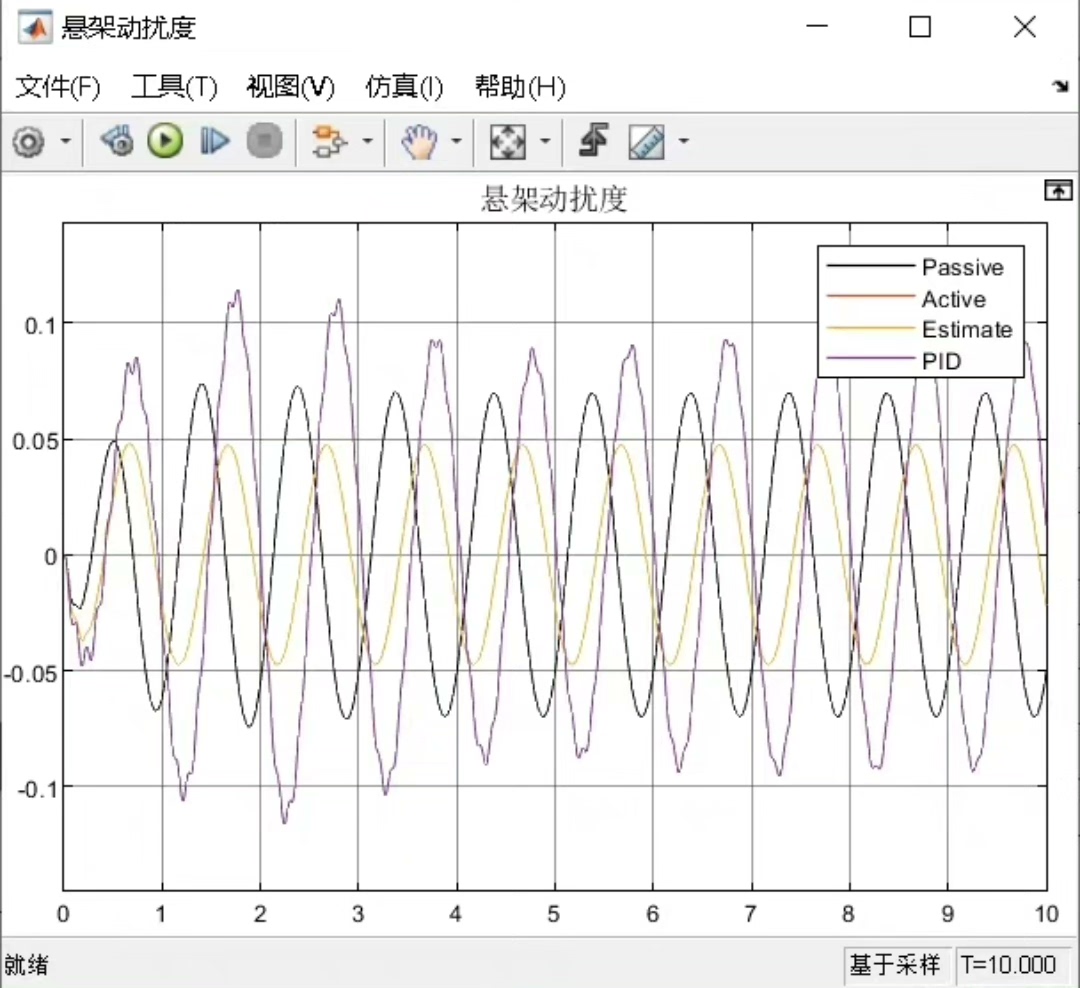
matlab/simulink半车主动悬架建模:基于ADRC(自抗扰控制)的主动悬架控制。 主体模型为半车主动悬架,采取ADRC控制。 输出为车身加速度,悬架动挠度,轮胎动变形。 默认输入为正弦路面输入。 有与pid控制的效果对比。
在汽车悬架系统的研究中,如何提升车辆行驶的平顺性和安全性一直是热门话题。今天咱们就来聊聊基于 Matlab/Simulink 的半车主动悬架建模,并且重点探讨基于自抗扰控制(ADRC)的主动悬架控制,同时和经典的 PID 控制做个效果对比。
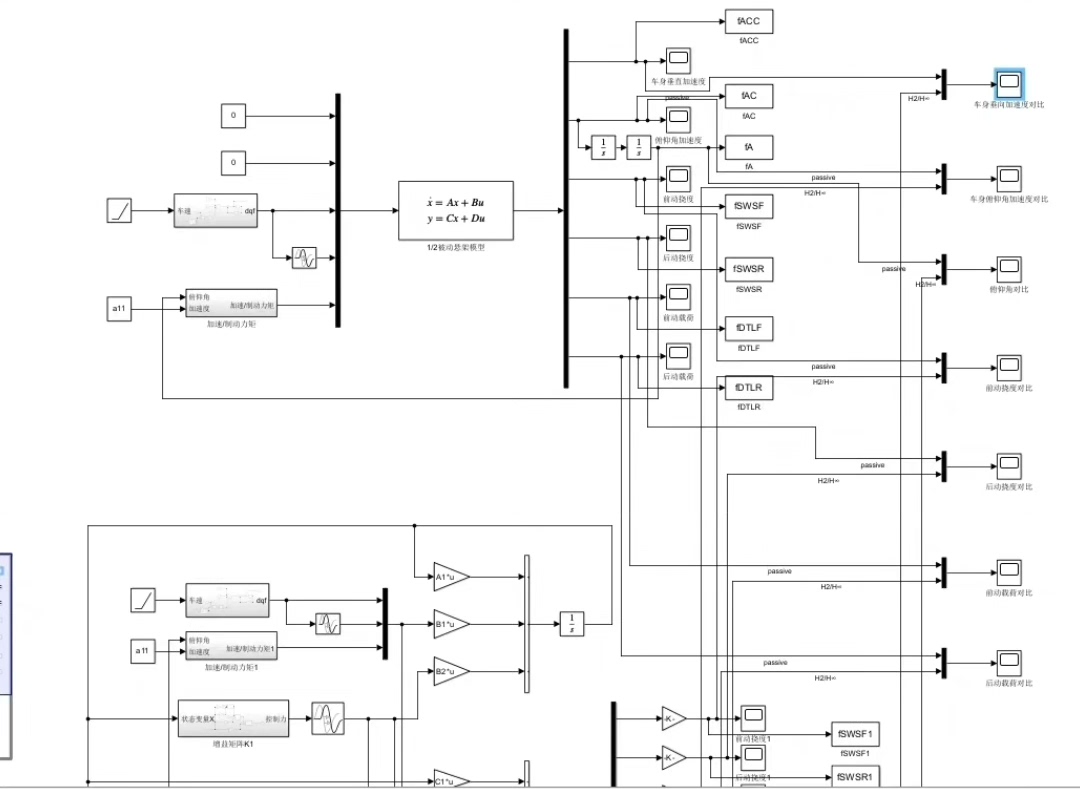
半车主动悬架主体模型
半车主动悬架模型是本次研究的基础架构。它模拟了车辆一半的悬架系统,包括车身、悬架弹簧、减震器以及轮胎等关键部分。在 Simulink 中搭建这个模型,我们可以通过各种模块来精确描述这些部件的动力学特性。比如,车身可以用一个质量块来表示,悬架弹簧和减震器则可以用相应的力学模型模块进行连接。
ADRC 控制闪亮登场
自抗扰控制(ADRC)是一种不依赖精确模型的控制策略,非常适合复杂的悬架系统。它的核心思想是把系统中的未知扰动和未建模动态当作一个“总扰动”,通过扩张状态观测器(ESO)来实时估计并补偿这个总扰动。
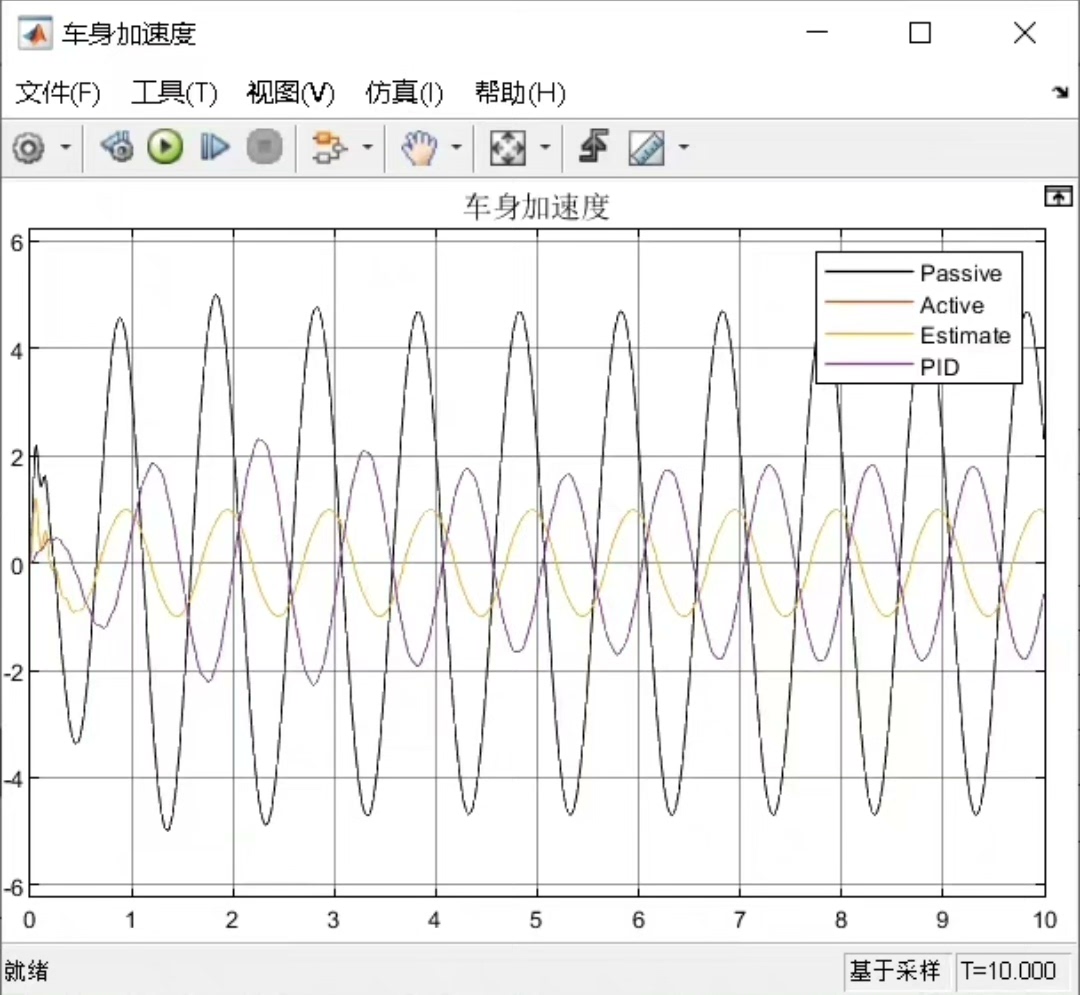
matlab/simulink半车主动悬架建模:基于ADRC(自抗扰控制)的主动悬架控制。 主体模型为半车主动悬架,采取ADRC控制。 输出为车身加速度,悬架动挠度,轮胎动变形。 默认输入为正弦路面输入。 有与pid控制的效果对比。
在 Matlab 代码实现 ADRC 时,关键部分如下:
% 定义ADRC参数
beta01 = 100;
beta02 = 1000;
beta1 = 50;
beta2 = 100;
b0 = 1;
% 初始化状态变量
x1 = 0;
x2 = 0;
z1 = 0;
z2 = 0;
z3 = 0;
% 离散时间步长
dt = 0.01;
for k = 1:N
% 获取系统输出y(这里假设y是悬架动挠度)
y = get_system_output();
% 扩张状态观测器更新
e = z1 - y;
z1 = z1 + dt * (z2 - beta01 * e);
z2 = z2 + dt * (z3 - beta02 * fal(e, 0.5, 0.01));
z3 = z3 - dt * beta1 * fal(e, 0.25, 0.01);
% 非线性状态误差反馈控制律
u0 = -beta2 * fal(z1 - r, 0.5, 0.01) - z2;
u = (u0 - z3) / b0;
% 将控制量u输入到悬架系统模型中
set_control_input(u);
% 更新状态变量
x1 = x1 + dt * x2;
x2 = x2 + dt * f(x1, x2); % f 为悬架系统的动力学方程
end这里 beta01、beta02 等参数是根据系统特性调整的。fal 函数是非线性函数,用于处理不同阶段的误差。z1、z2、z3 是扩张状态观测器的状态变量,通过不断迭代更新来估计系统状态和总扰动。u 就是最终得到的控制量,输入到悬架系统模型中。
正弦路面输入设定
默认情况下,我们使用正弦路面输入来模拟车辆行驶的路况。在 Simulink 中,可以轻松地通过信号发生器模块生成正弦信号。假设正弦路面输入的表达式为 y = A sin(2 pi f t),其中 A 是振幅,f 是频率,t 是时间。
% 正弦路面输入参数
A = 0.05; % 振幅
f = 2; % 频率
t = 0:0.01:10; % 时间向量
y_road = A * sin(2 * pi * f * t);这样就生成了一个简单的正弦路面输入信号,它作为悬架系统的激励,来观察悬架在不同时刻的响应。
输出参数:车身加速度、悬架动挠度、轮胎动变形
这些输出参数直接反映了悬架系统的性能。车身加速度影响乘客的舒适性,悬架动挠度决定了悬架的工作范围,轮胎动变形则关乎车辆与地面的接触情况。在 Simulink 模型中,通过相应的传感器模块可以获取这些参数的值。
ADRC 与 PID 控制效果对比
PID 控制作为经典的控制策略,大家肯定不陌生。它通过比例(P)、积分(I)、微分(D)三个环节对系统进行调节。
% PID参数
Kp = 10;
Ki = 0.1;
Kd = 1;
% 初始化误差和积分项
error_prev = 0;
integral = 0;
for k = 1:N
% 获取系统输出y
y = get_system_output();
% 计算误差
error = r - y;
% 积分项更新
integral = integral + error * dt;
% PID控制律
u_pid = Kp * error + Ki * integral + Kd * (error - error_prev) / dt;
% 将控制量u_pid输入到悬架系统模型中
set_control_input(u_pid);
% 更新误差
error_prev = error;
end从实际效果来看,ADRC 控制在应对复杂路况时表现出更好的鲁棒性。当路面输入发生突变时,ADRC 能够快速调整控制量,使得车身加速度、悬架动挠度和轮胎动变形都能保持在合理范围内。而 PID 控制对于精确模型的依赖较大,在一些未建模动态和扰动出现时,其控制效果会有所下降。比如在高频正弦路面输入下,PID 控制的车身加速度波动相对较大,乘客舒适性会受到影响,而 ADRC 则能更好地抑制这种波动。
通过这次在 Matlab/Simulink 中的半车主动悬架建模及 ADRC 与 PID 控制效果对比,我们能更清楚地看到不同控制策略在悬架系统中的优劣,为未来悬架系统的优化设计提供了很好的参考。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 2
2 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)