基于YOLOv8/YOLOv10/YOLOv11/YOLOv12与SpringBoot的工地运输车类型检测系统(DeepSeek智能分析+web交互界面+前后端分离+YOLO数据)
摘要
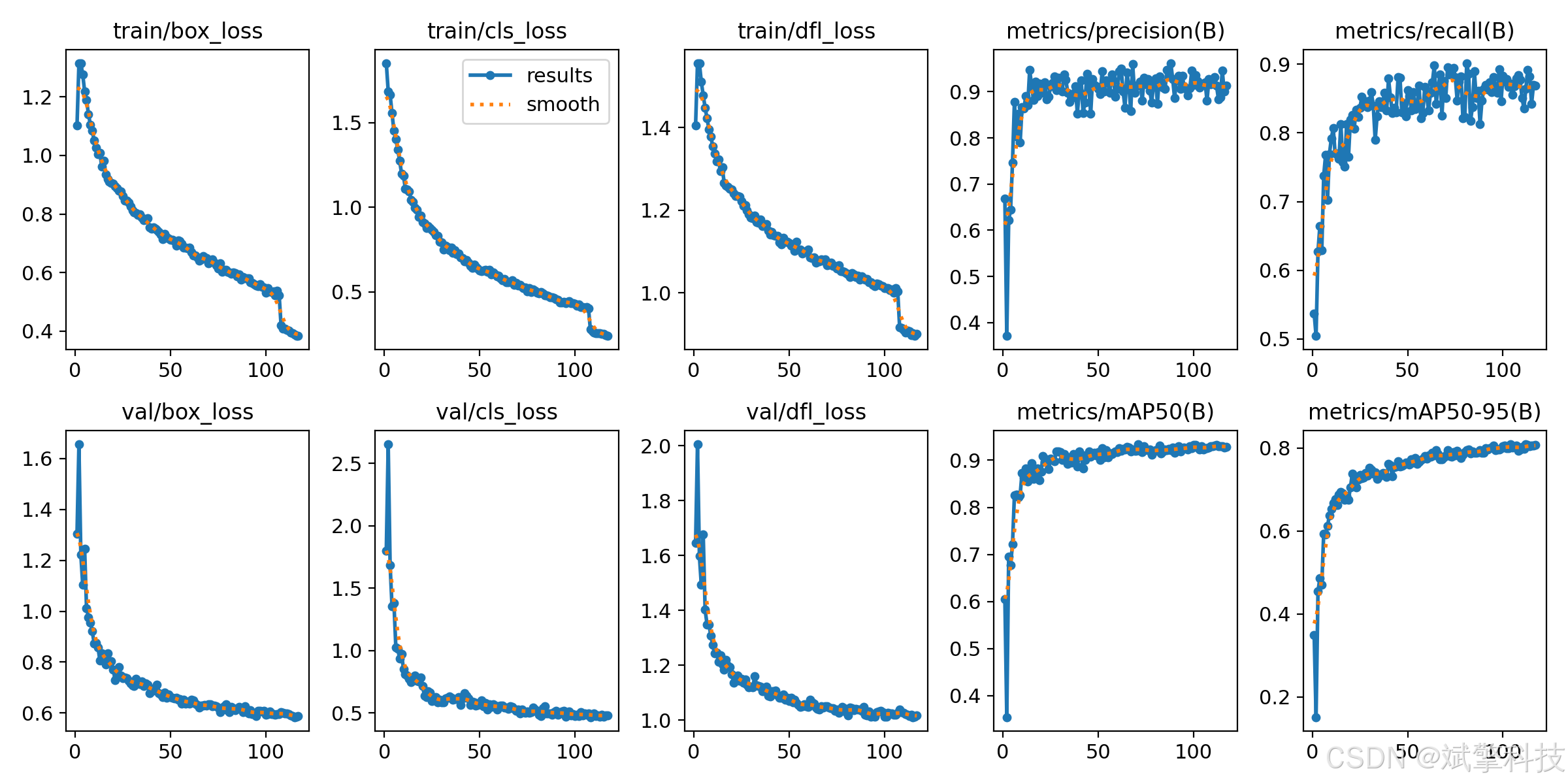
随着我国城市化进程的不断加速和基础设施建设的蓬勃开展,各类大型工地现场的管理日益复杂化与精细化。工地内部运输车辆(如挖掘机、自卸卡车、轮式装载机)的高效、安全管理是保障施工进度、预防安全事故、优化资源配置的关键环节。传统的人工巡查与监控方式存在效率低下、实时性差、易漏检误判等弊端,难以满足现代化智慧工地的管理需求。本项目旨在设计并实现一套集成了前沿深度学习目标检测技术、现代化Web开发架构与智能分析功能的“智慧工地运输车类型智能检测与管理系统”。本系统核心采用当下性能卓越且持续演进的YOLO系列模型(包括YOLOv8、YOLOv10、YOLOv11及YOLOv12),构建了一个高精度、可实时运算的车辆检测引擎。通过SpringBoot后端框架与前后端分离技术,构建了稳定、可扩展且用户友好的交互式Web管理平台。系统深度融合了DeepSeek大语言模型的智能分析能力,不仅实现了对图像、视频流及摄像头实时画面的多模态目标检测,更能对检测结果进行上下文理解与语义化描述,显著提升了管理决策的智能化水平。系统具备完善的用户权限管理、海量检测数据的结构化存储(基于MySQL)、多维度的可视化统计分析以及全流程的记录追溯功能。经测试,系统对“挖掘机”、“自卸卡车”、“轮式装载机”三类典型工地运输车的平均检测精度(mAP)达到较高水平,能够有效服务于工地车辆调度、安全监控、作业统计等实际场景,为工地数字化转型与智能化升级提供了强有力的技术工具和解决方案。
详细功能展示视频
基于深度学习和千问|DeepSeek的工地运输车检测系统(web界面+YOLOv8/YOLOv10/YOLOv11/YOLOv12+前后端分离+python)_哔哩哔哩_bilibili
https://www.bilibili.com/video/BV1uJcsz6EeL/

目录
一、引言
在“新基建”和“智慧城市”建设浪潮的推动下,建筑工地的信息化、智能化管理已成为行业发展的必然趋势。工地运输车辆作为施工物料搬运、土方作业的核心装备,其类型识别、作业状态监控与运行轨迹分析对于提升工地整体运营效率、强化安全监管、降低人力成本具有至关重要的意义。当前,尽管视频监控设备在工地已广泛普及,但其产生的海量视频数据仍主要依赖人工审看,自动化分析与信息提取能力严重不足。
近年来,以卷积神经网络为代表的深度学习技术在计算机视觉领域取得了突破性进展,其中,YOLO系列算法因其在速度与精度间的优异平衡,成为实时目标检测任务的首选。从YOLOv8到最新的YOLOv12,每一代都在网络结构、损失函数、训练策略等方面进行了优化,不断提升对小目标、密集目标和复杂场景的检测鲁棒性。这为构建高性能的工地专用车辆检测模型提供了坚实的技术基础。与此同时,现代软件工程倡导前后端分离的开发模式,结合SpringBoot等轻量级Java框架,能够快速构建出高内聚、低耦合、易于维护和扩展的后端服务系统。
然而,单纯的检测框输出已难以满足高级管理需求。将大语言模型与视觉感知相结合,赋予系统“看懂”并“描述”场景的能力,是提升系统智能层次的关键。DeepSeek等先进大模型的引入,使得系统能够对检测到的车辆及其上下文关系进行自然语言分析,生成更富洞察力的报告。
基于上述背景与技术发展趋势,本项目综合运用多版本YOLO目标检测算法、SpringBoot后端开发技术、Vue.js等前端框架以及DeepSeek大语言模型,开发了一套功能全面、性能强劲、交互直观的智慧工地运输车类型检测与管理系统。本系统不仅实现了对三种主要工地运输车辆的高精度实时检测,还构建了一个涵盖用户管理、数据可视化、智能分析、记录归档等功能的完整Web应用生态,旨在为工地管理者提供一个一体化、智能化的数字管理平台,推动工地安全管理从“被动响应”向“主动预警”、从“经验驱动”向“数据驱动”的根本性转变。
项目核心内容详述
1. 深度学习检测模型核心
-
模型架构: 系统集成了YOLOv8、YOLOv10、YOLOv11和YOLOv12四个版本的检测模型,用户可根据对检测速度、精度以及不同场景适应性的需求,在前端界面进行灵活切换。这保证了系统能够利用最前沿的算法成果,并具备良好的技术延续性与可升级性。
-
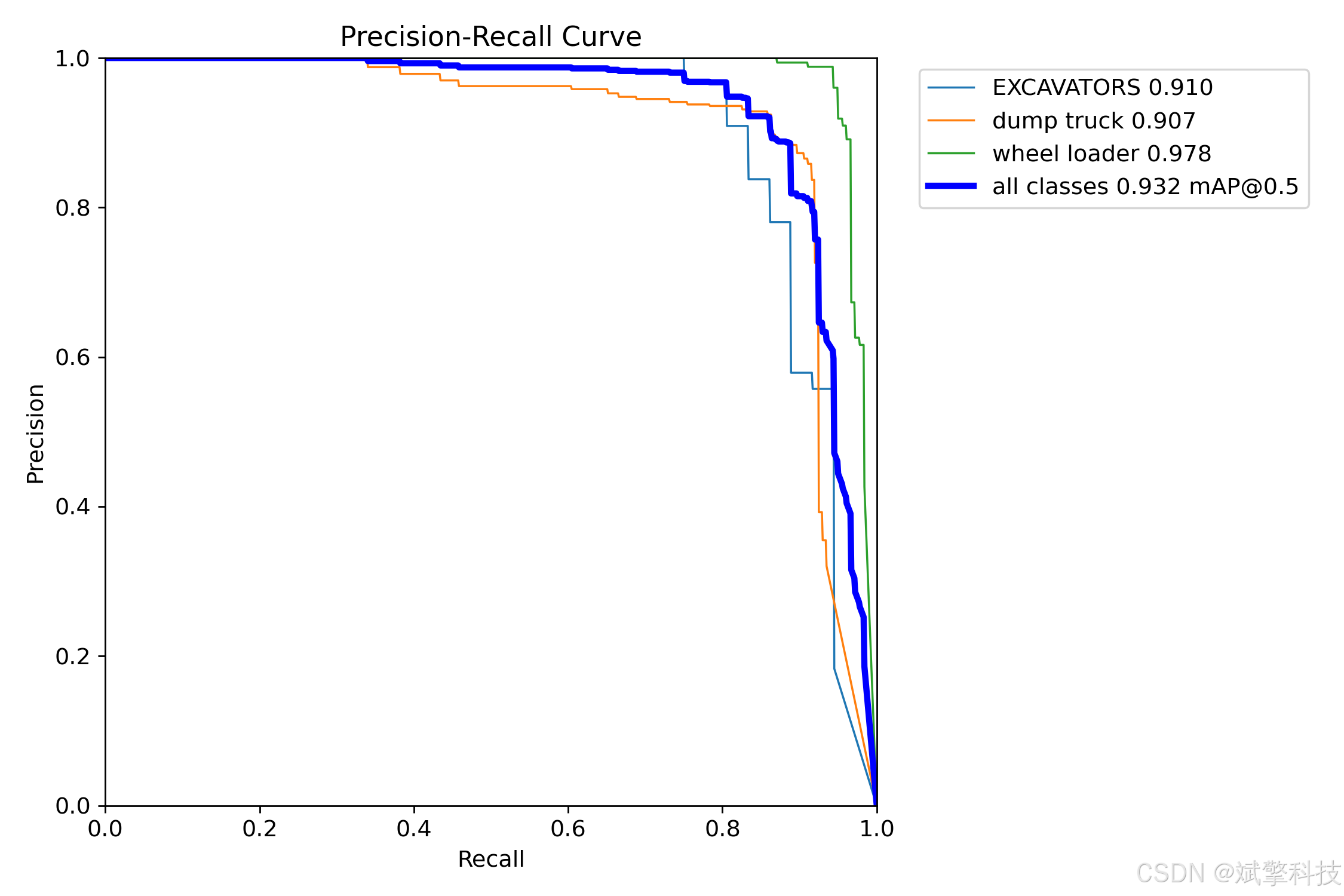
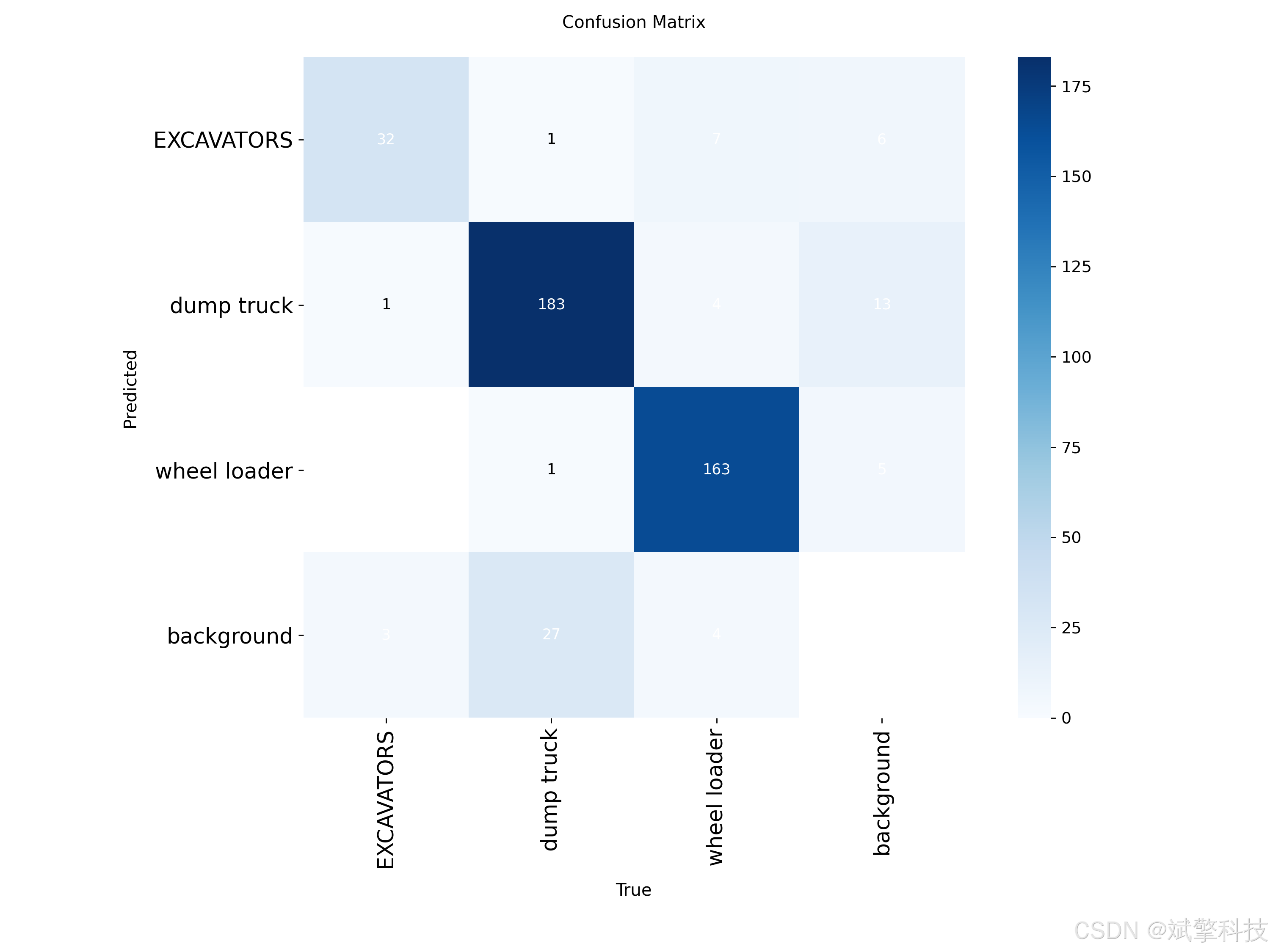
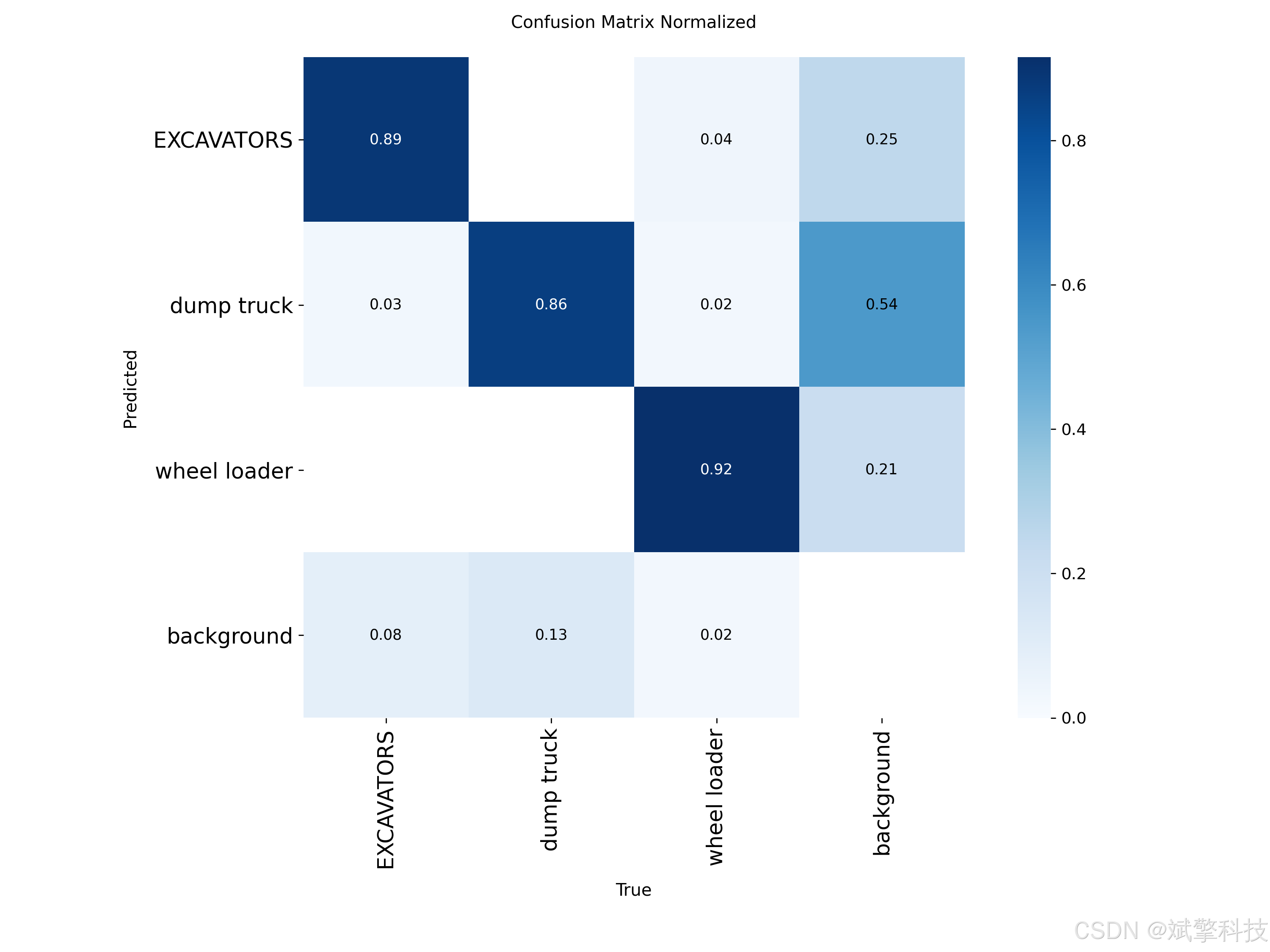
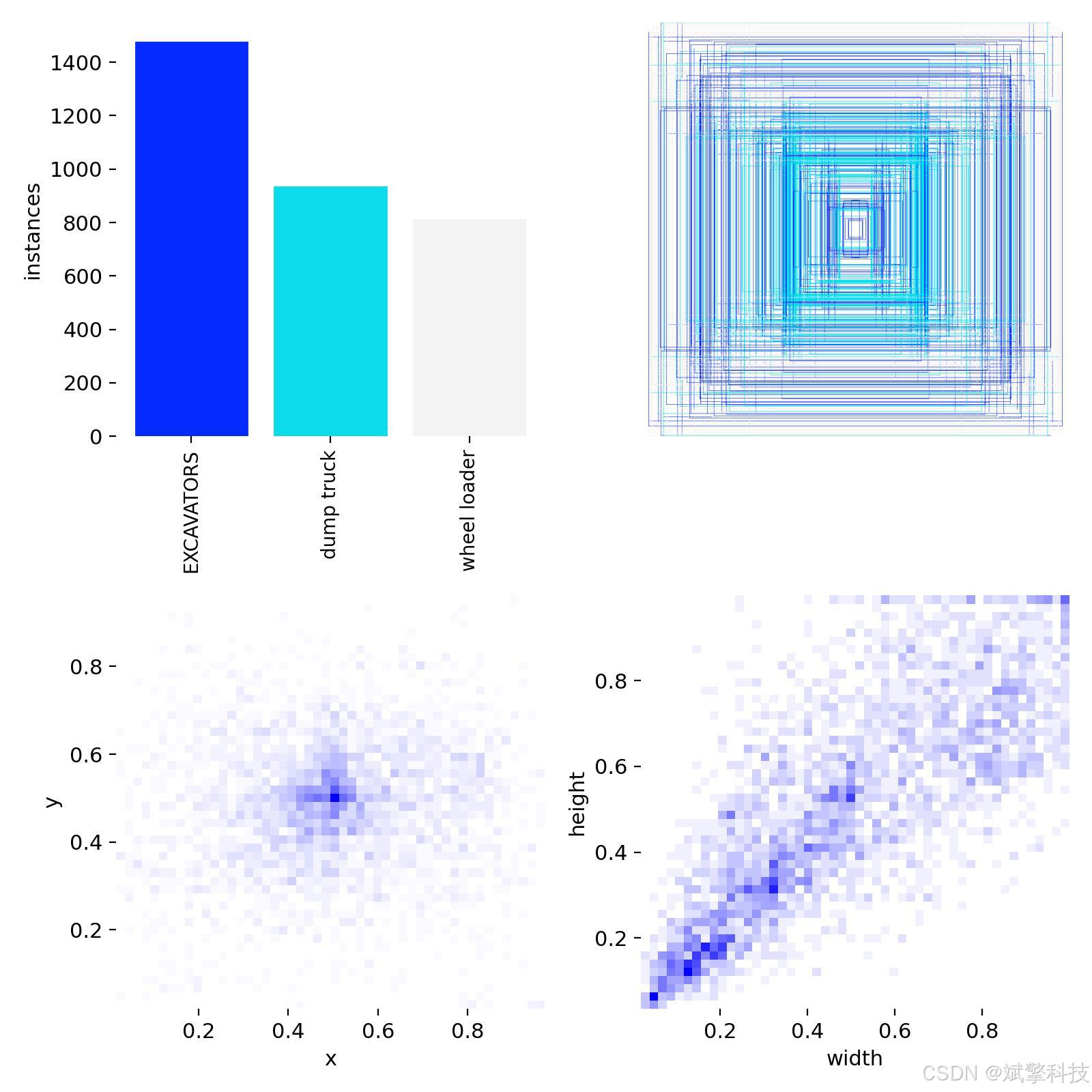
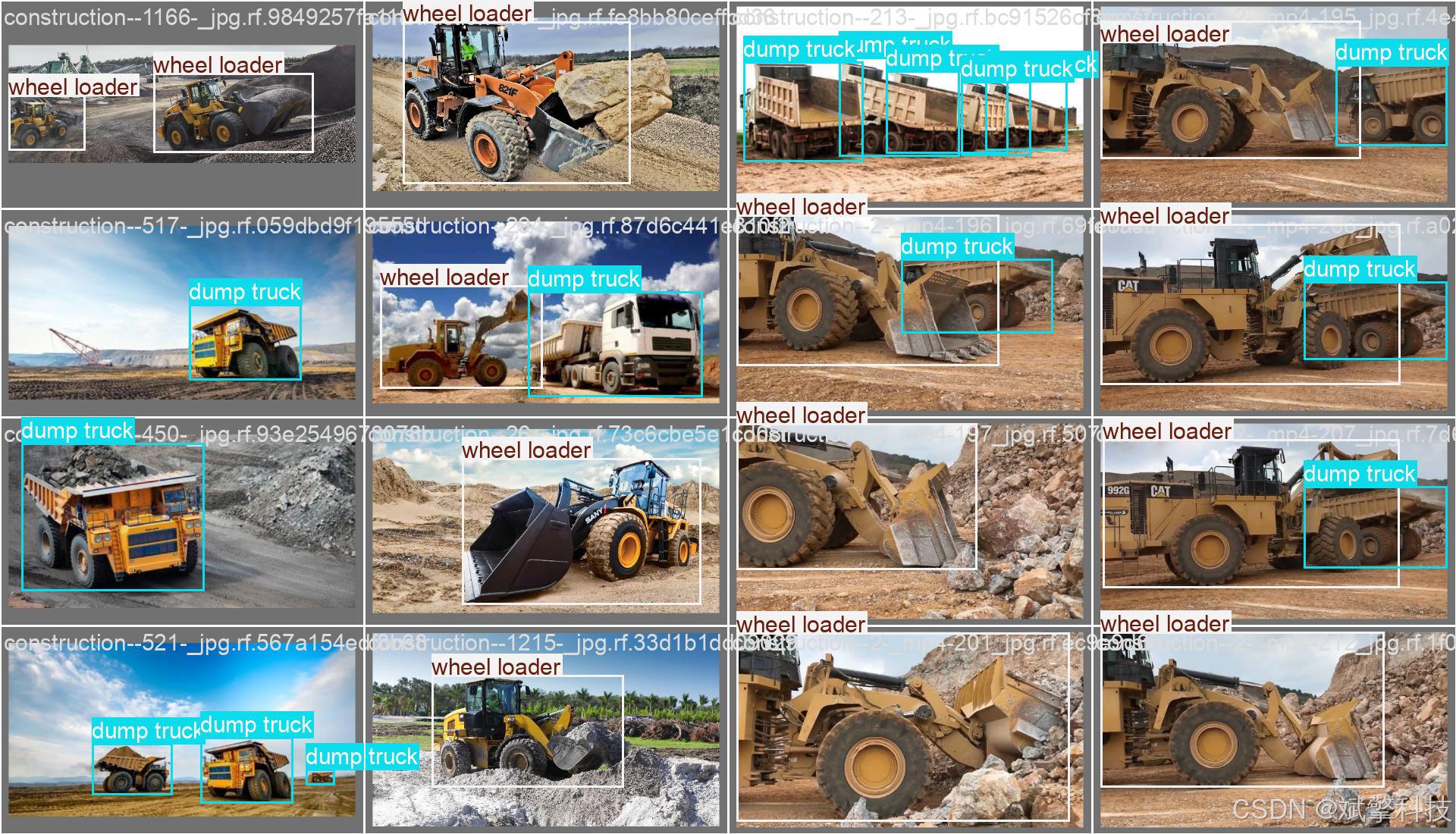
专用数据集: 针对工地复杂环境。数据集包含“EXCAVATORS”(挖掘机)、“dump truck”(自卸卡车)、“wheel loader”(轮式装载机)三个类别,总计图像2,655张,并严格按照训练集(2,244张)、验证集(267张)和独立测试集(144张)进行划分,确保模型训练的科学性与评估的客观性。数据进行了细致的标注,为模型学习提供了高质量的基础。
2. 系统软件架构与功能模块
-
前后端分离架构: 采用前后端分离的现代化Web开发模式。后端使用SpringBoot框架搭建RESTful API服务,负责核心业务逻辑、模型推理调度、数据库操作等;前端使用主流的Vue.js或React框架构建响应式用户界面,提供流畅的操作体验。
-
用户体系与安全管理:
-
实现完整的用户注册与登录功能。
-
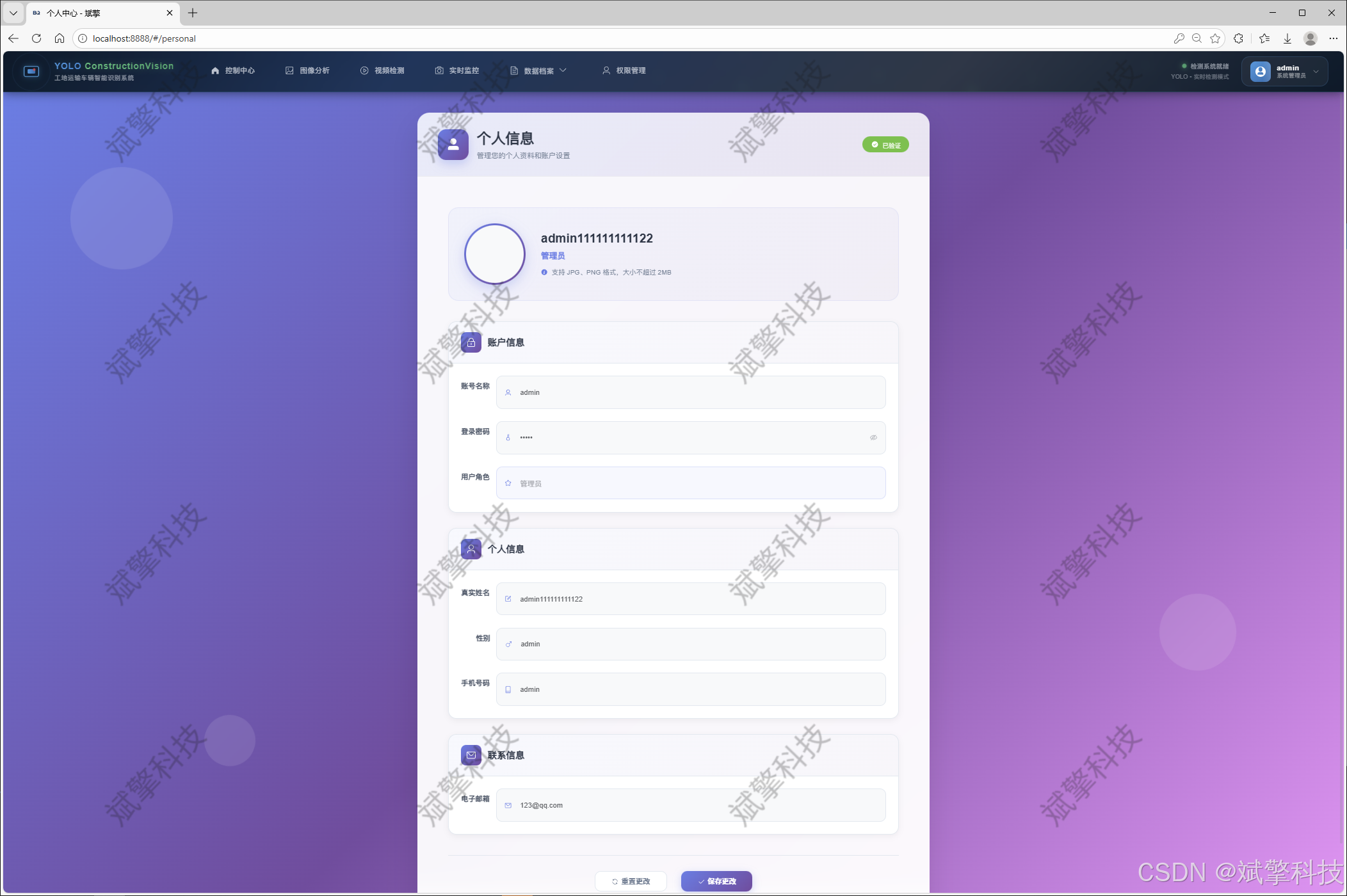
设立个人中心模块,用户可自主修改个人信息,如姓名、头像及密码。
-
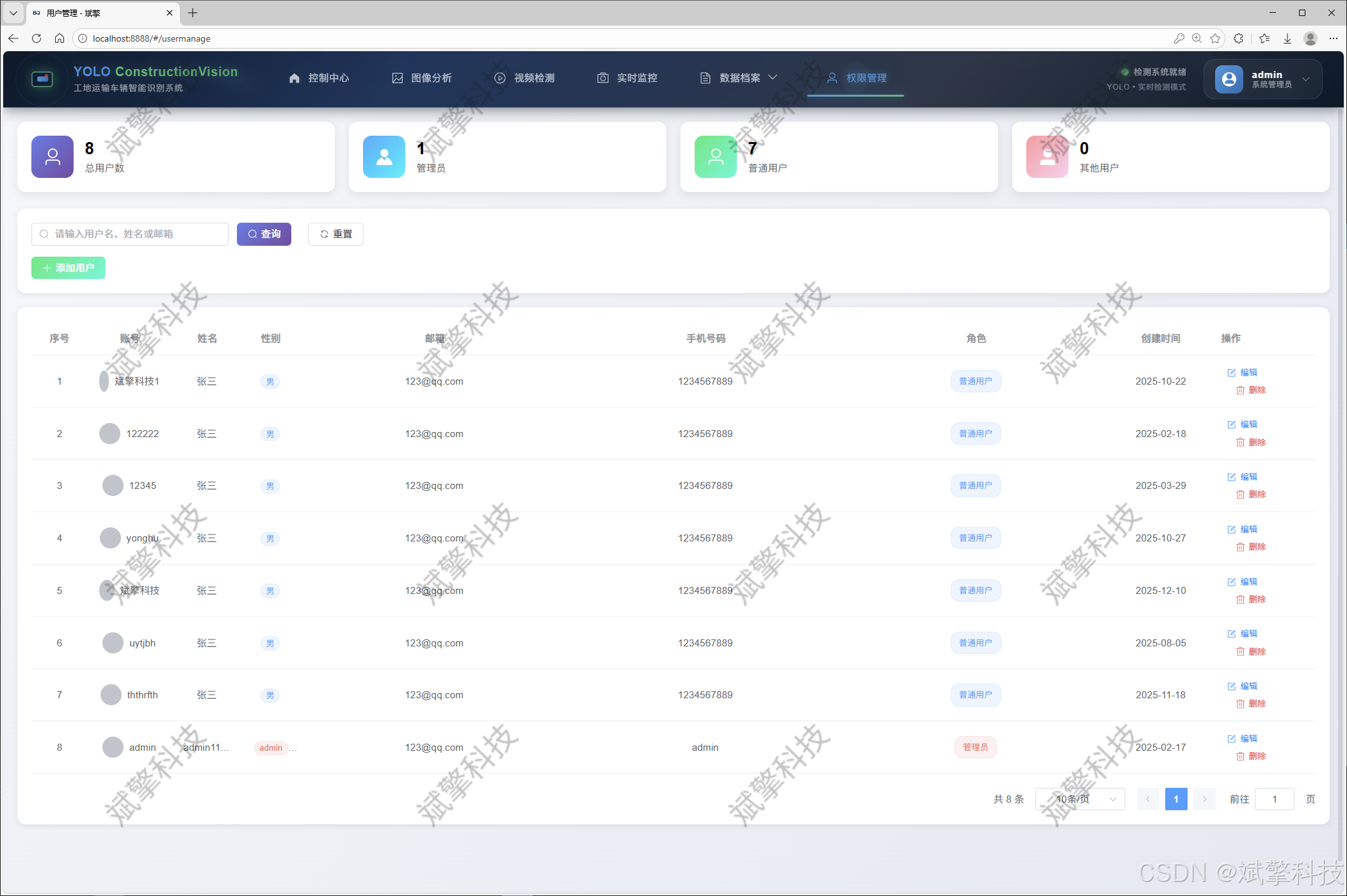
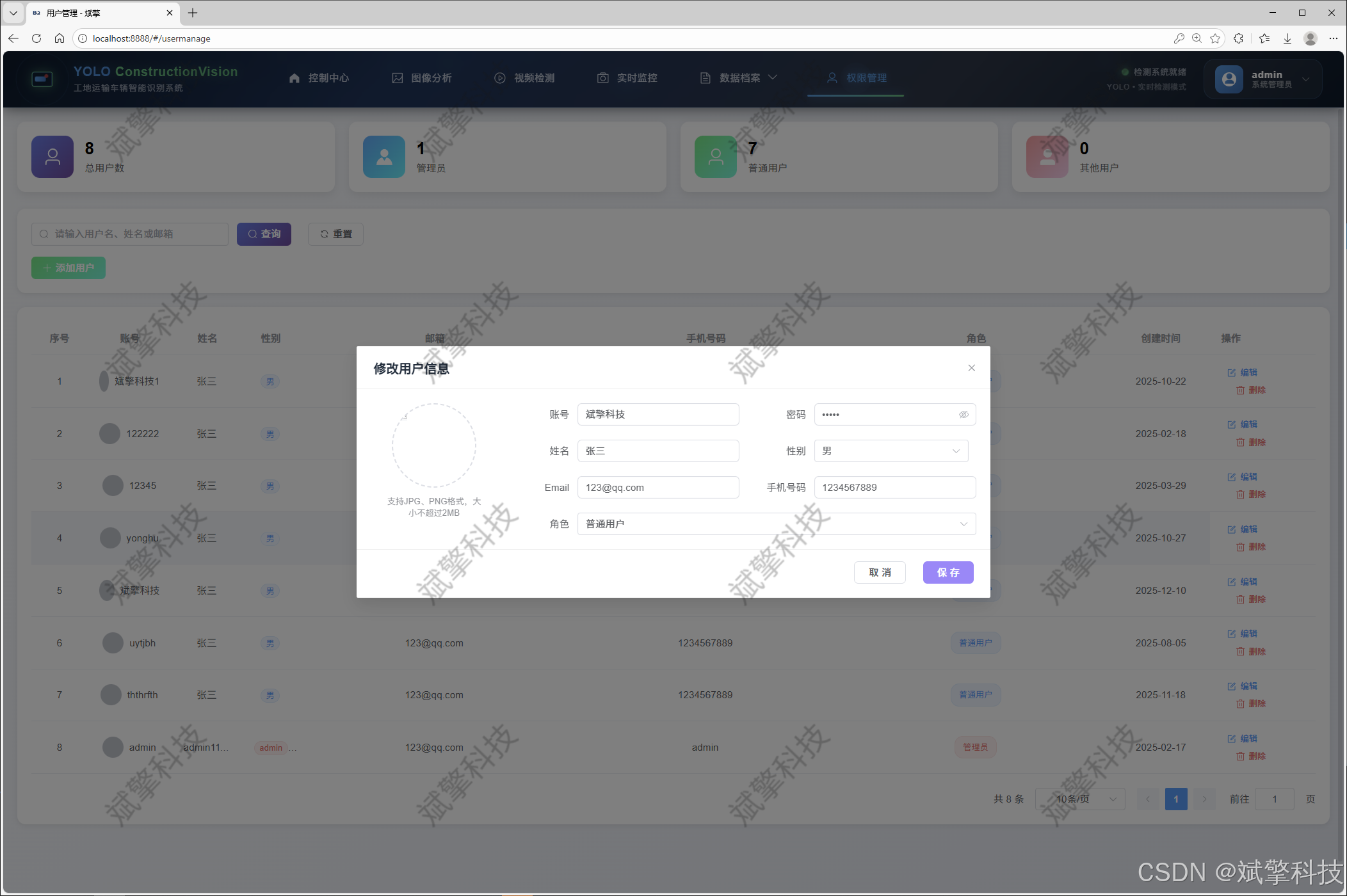
提供管理员专属的用户管理模块,支持对系统内所有用户进行增、删、改、查(CRUD)操作,实现精细化的权限控制。
-
-
多模态检测服务:
-
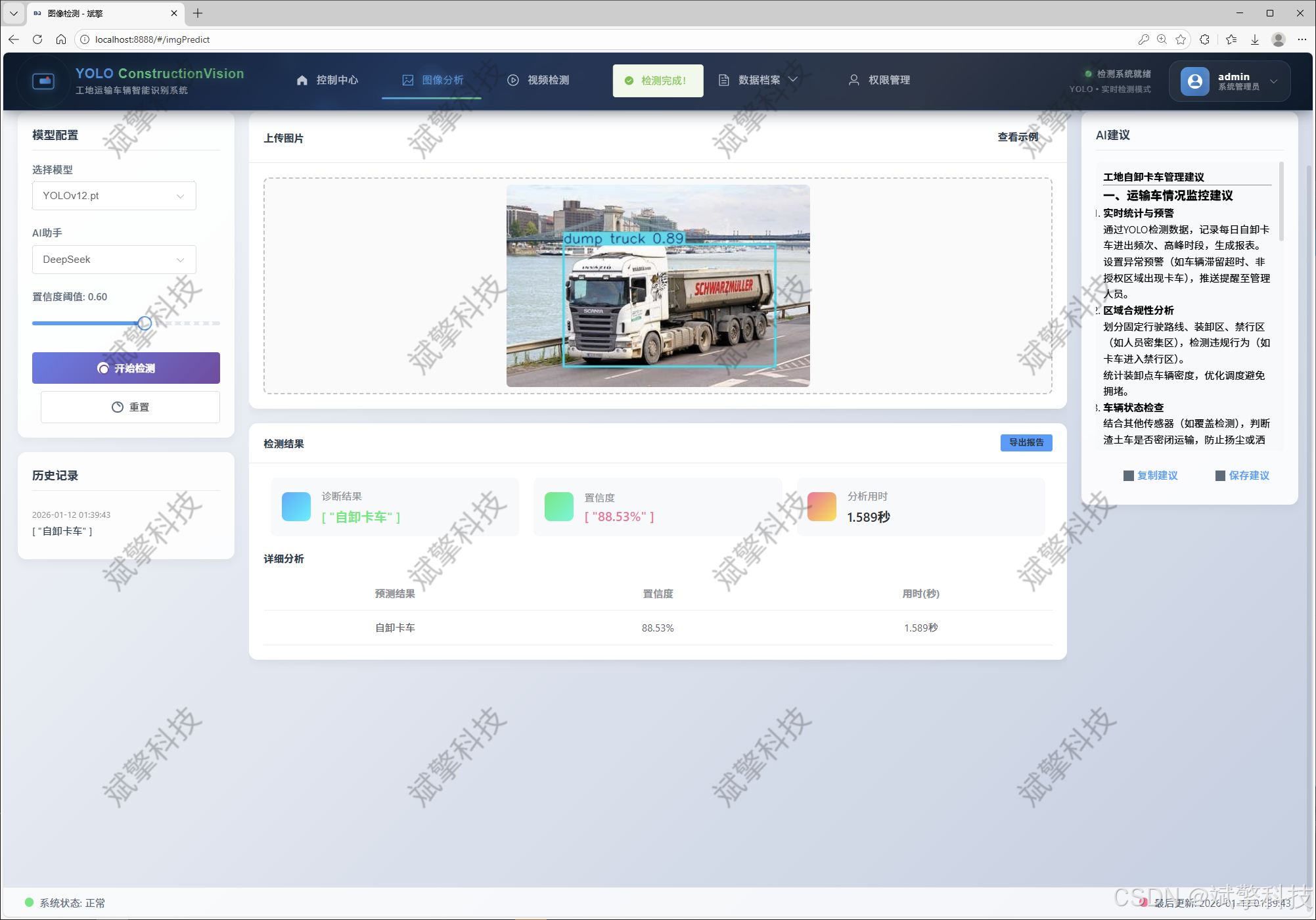
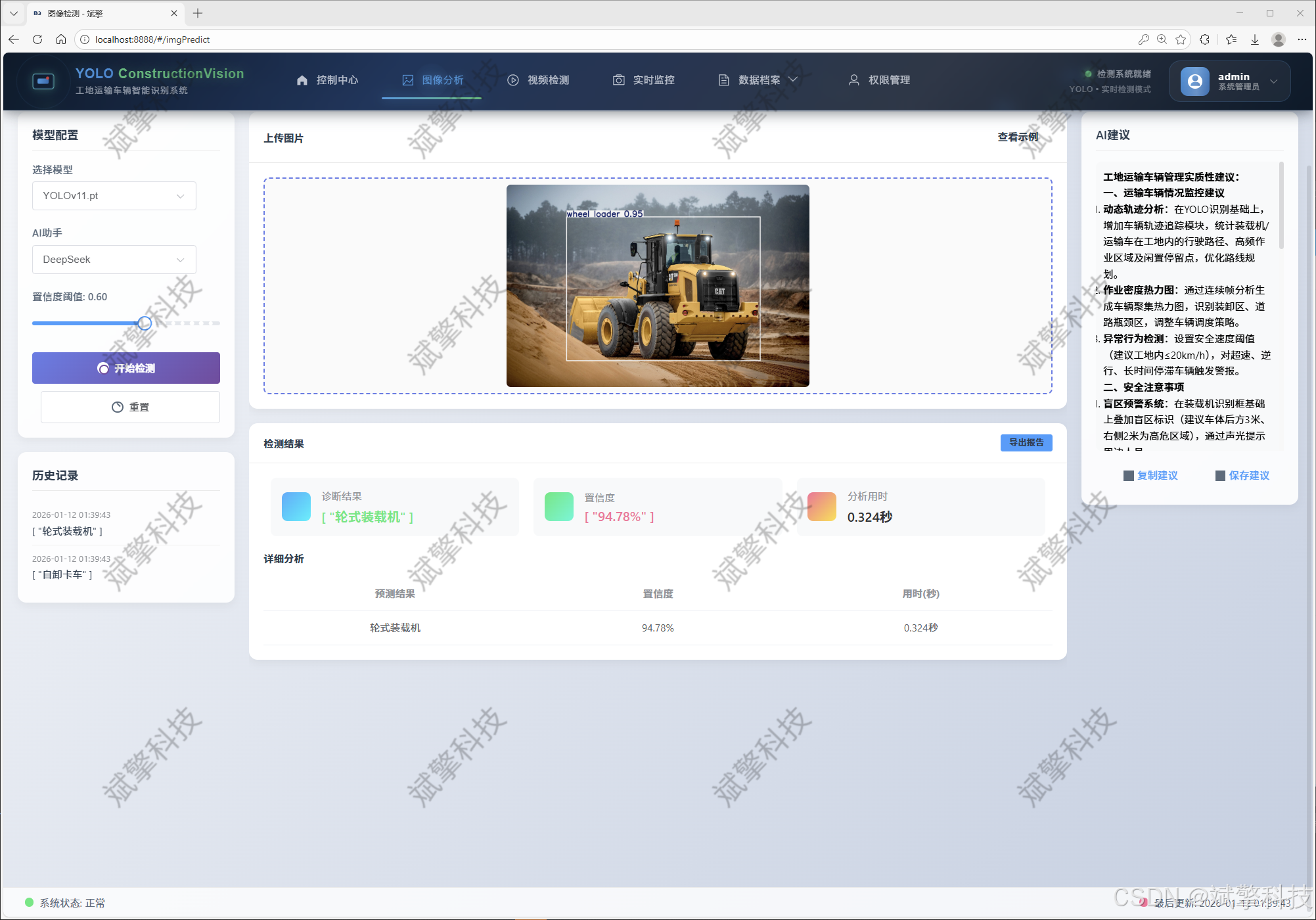
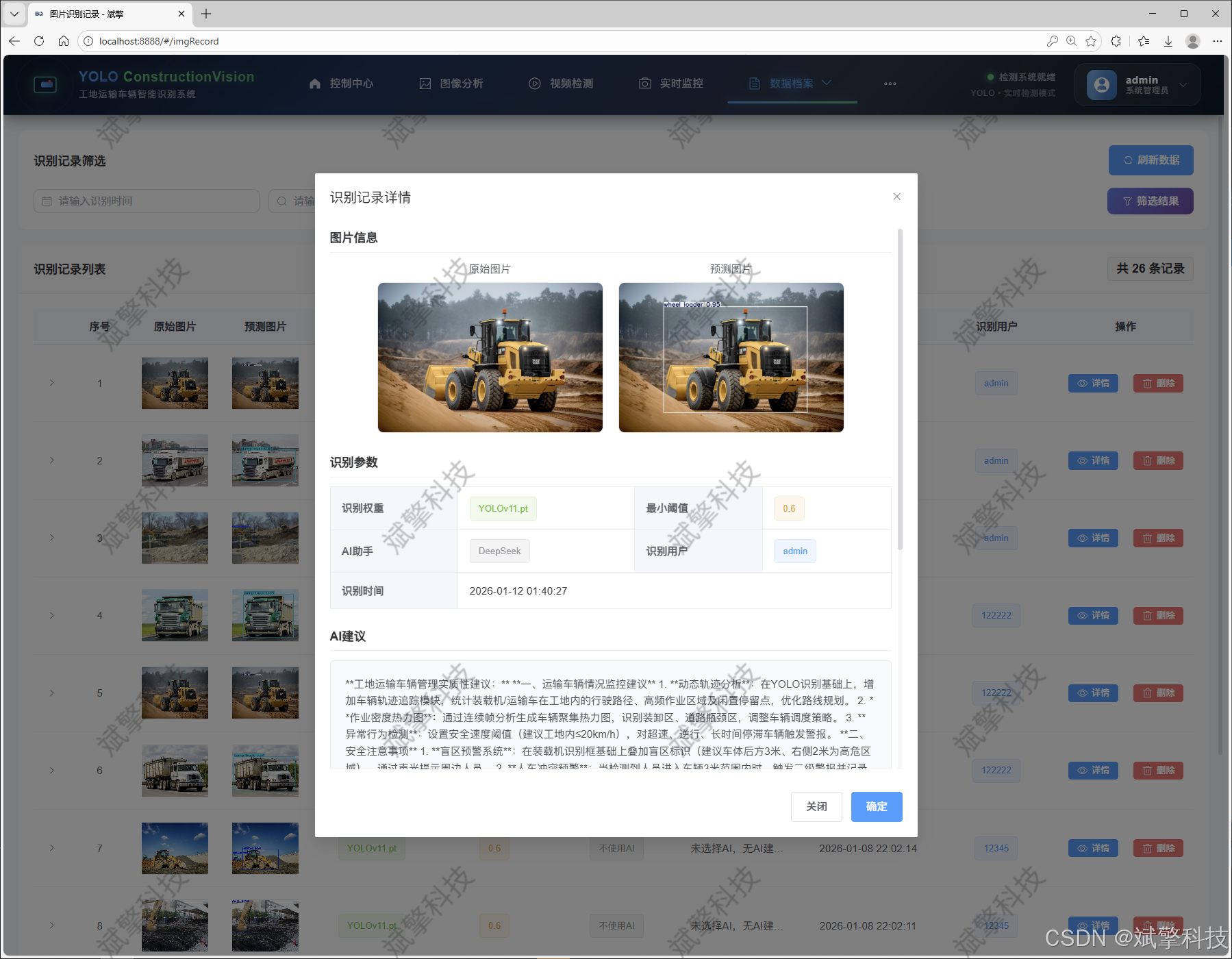
图像检测: 支持用户上传工地现场图片,系统调用选定的YOLO模型进行检测,并利用DeepSeek模型对检测结果进行智能分析,生成简明的文本描述或安全提示。
-
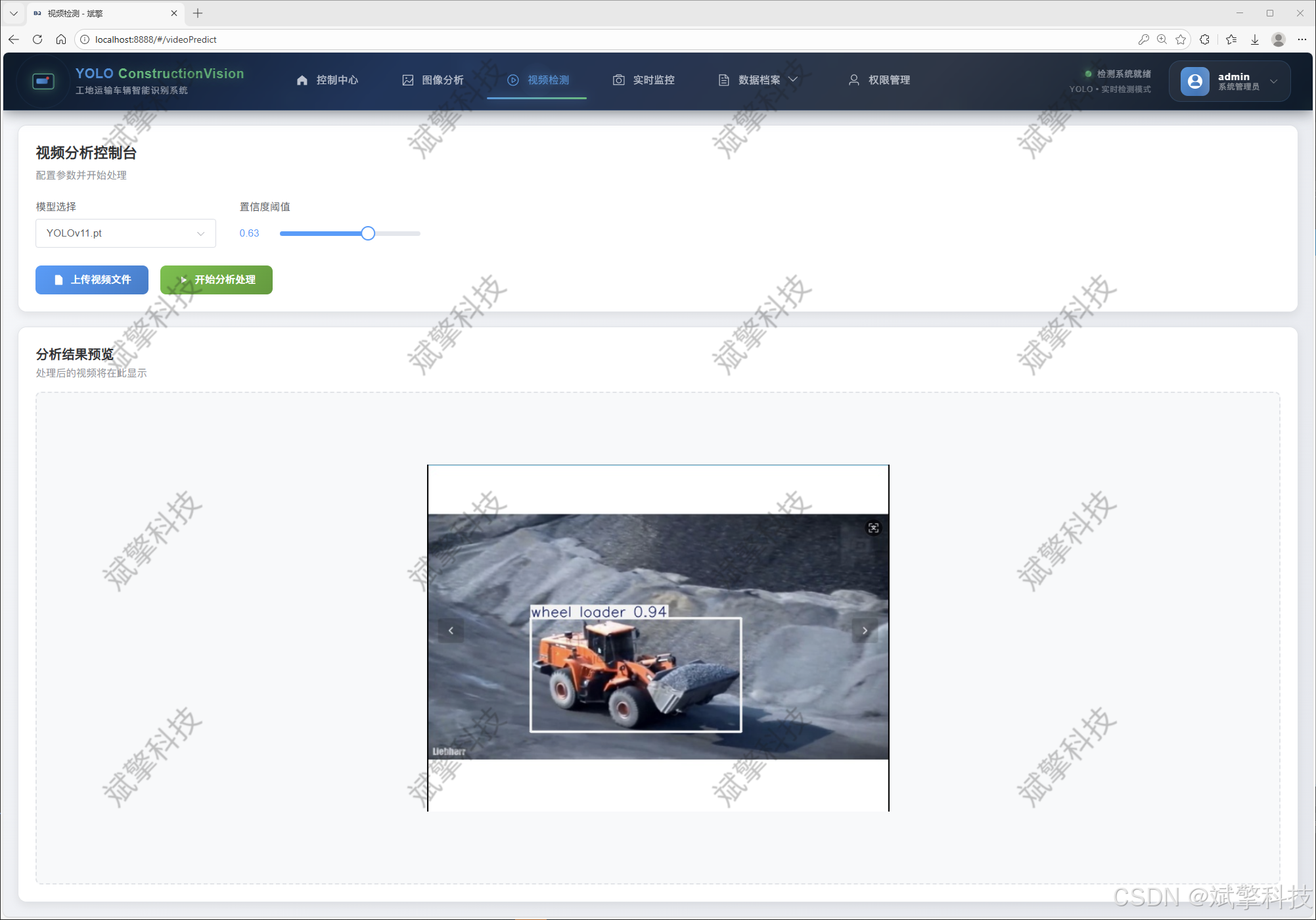
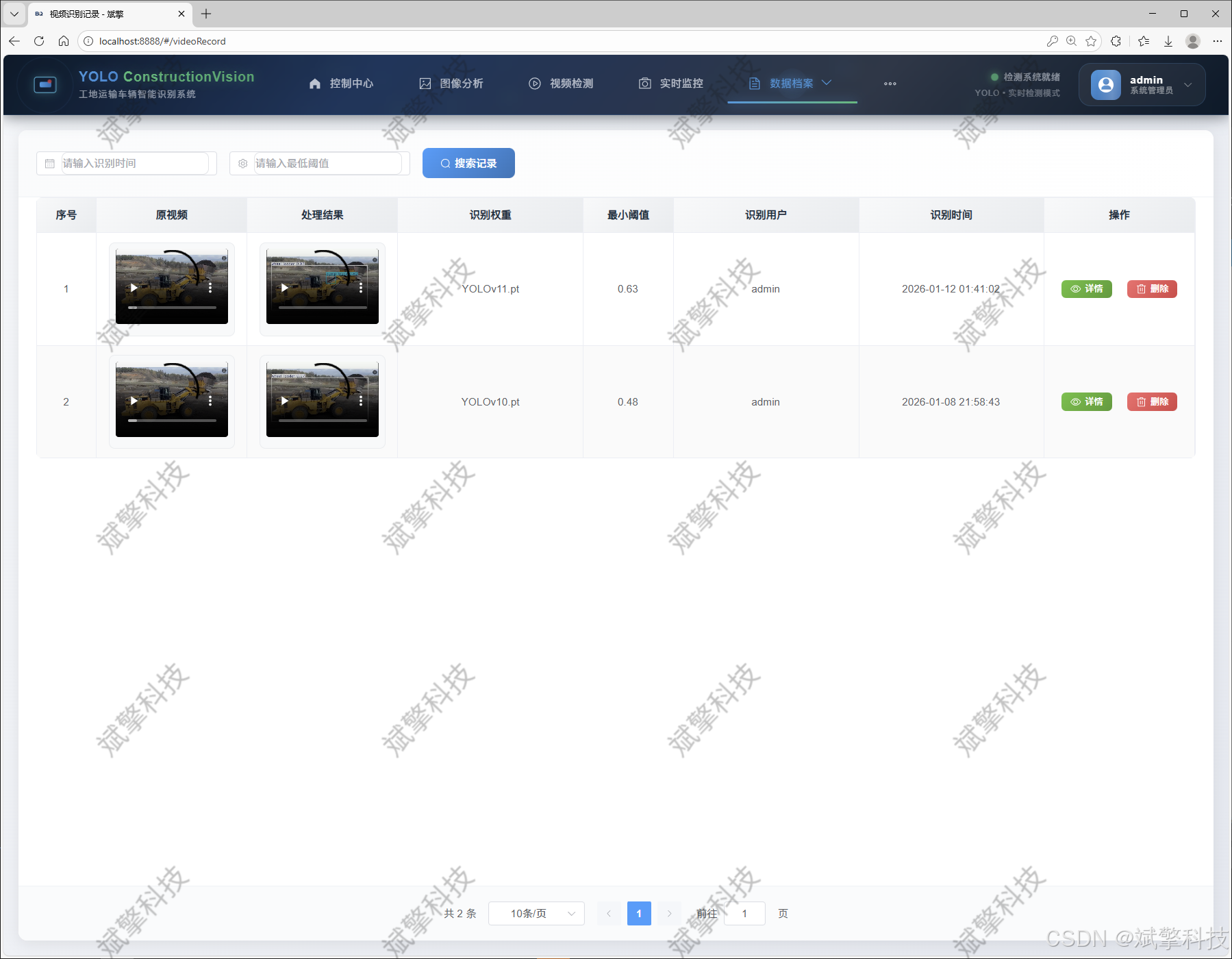
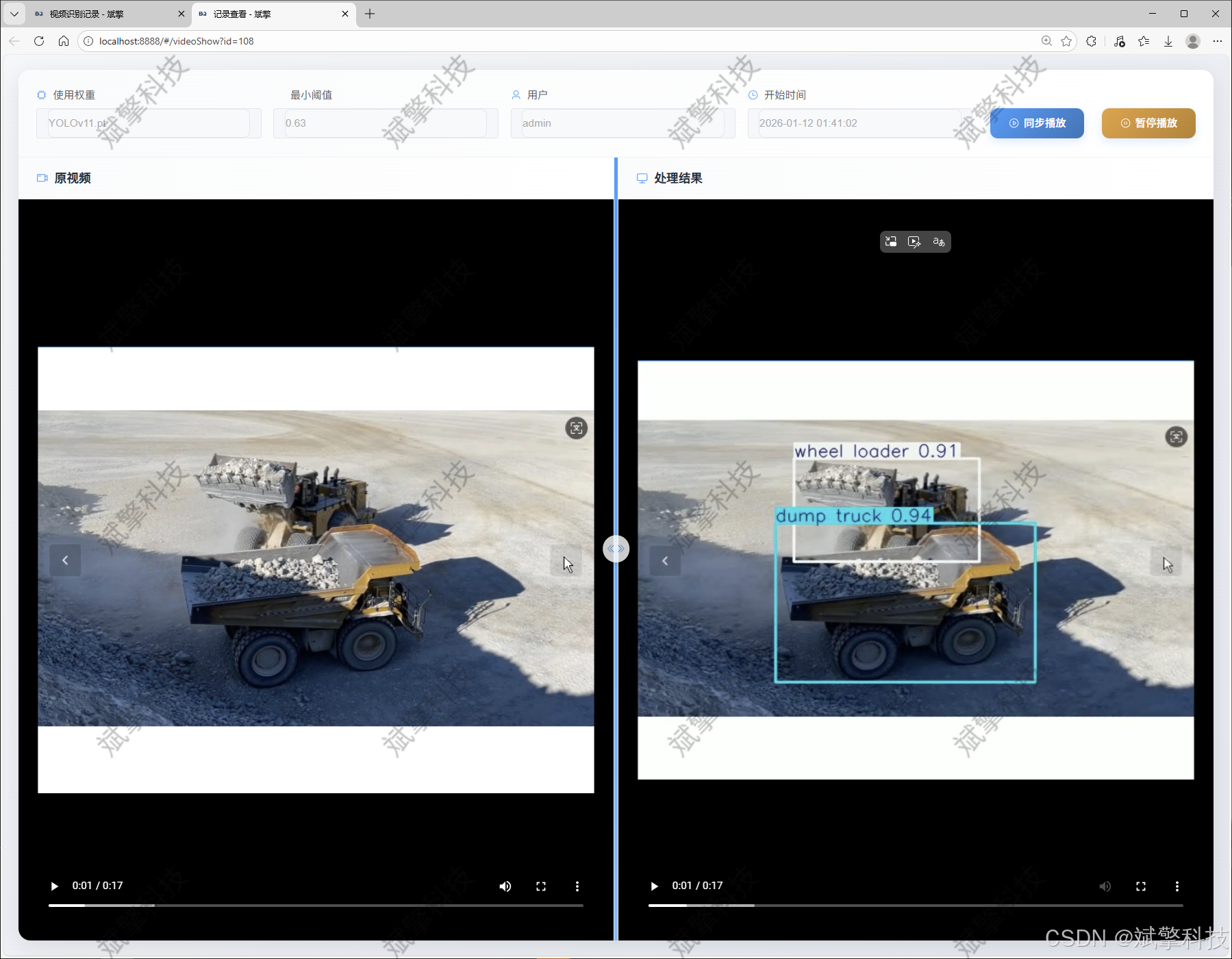
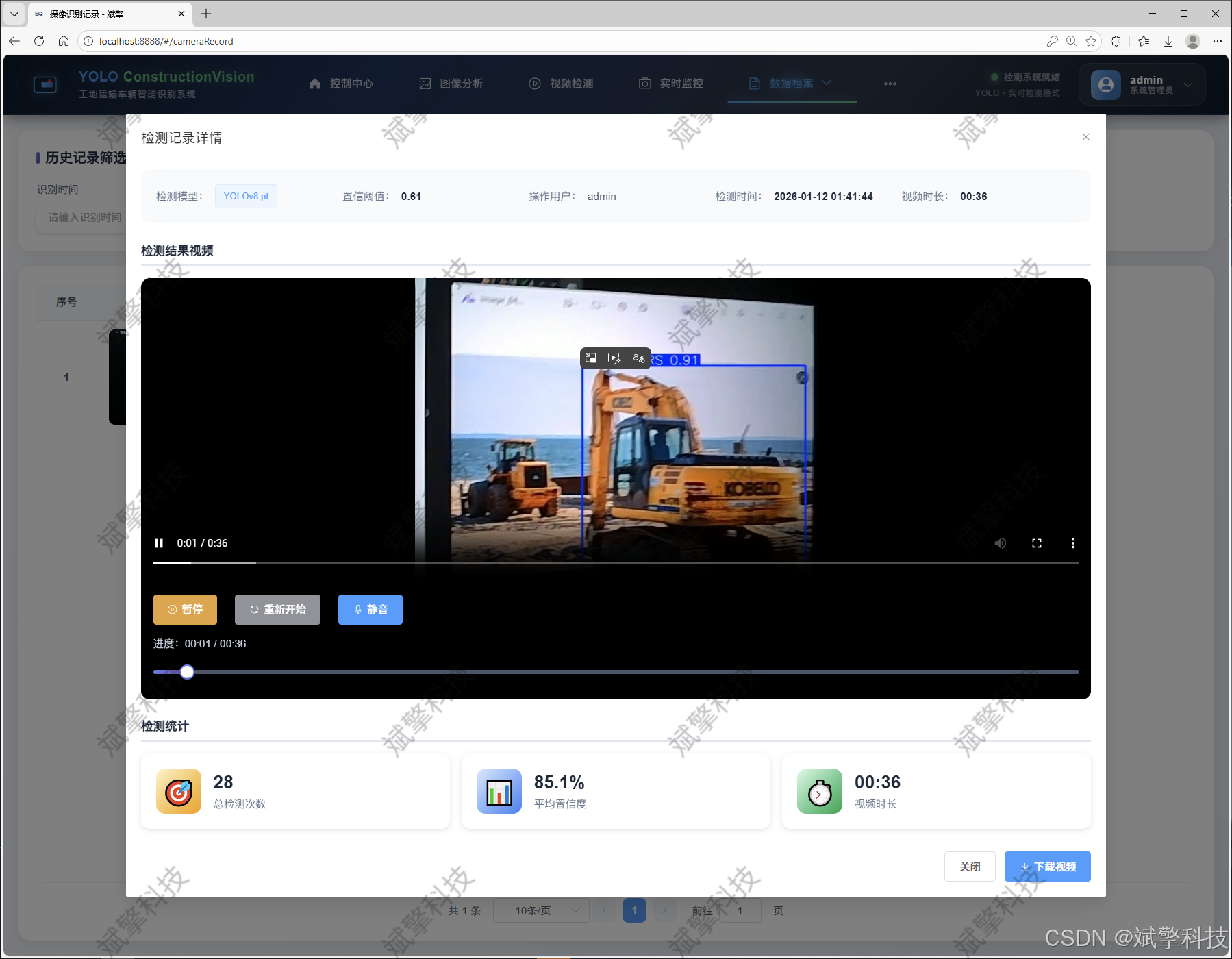
视频检测: 支持上传工地监控视频文件,系统进行逐帧或抽帧分析,输出带有检测框和类别的结果视频,同时生成检测统计报告。
-
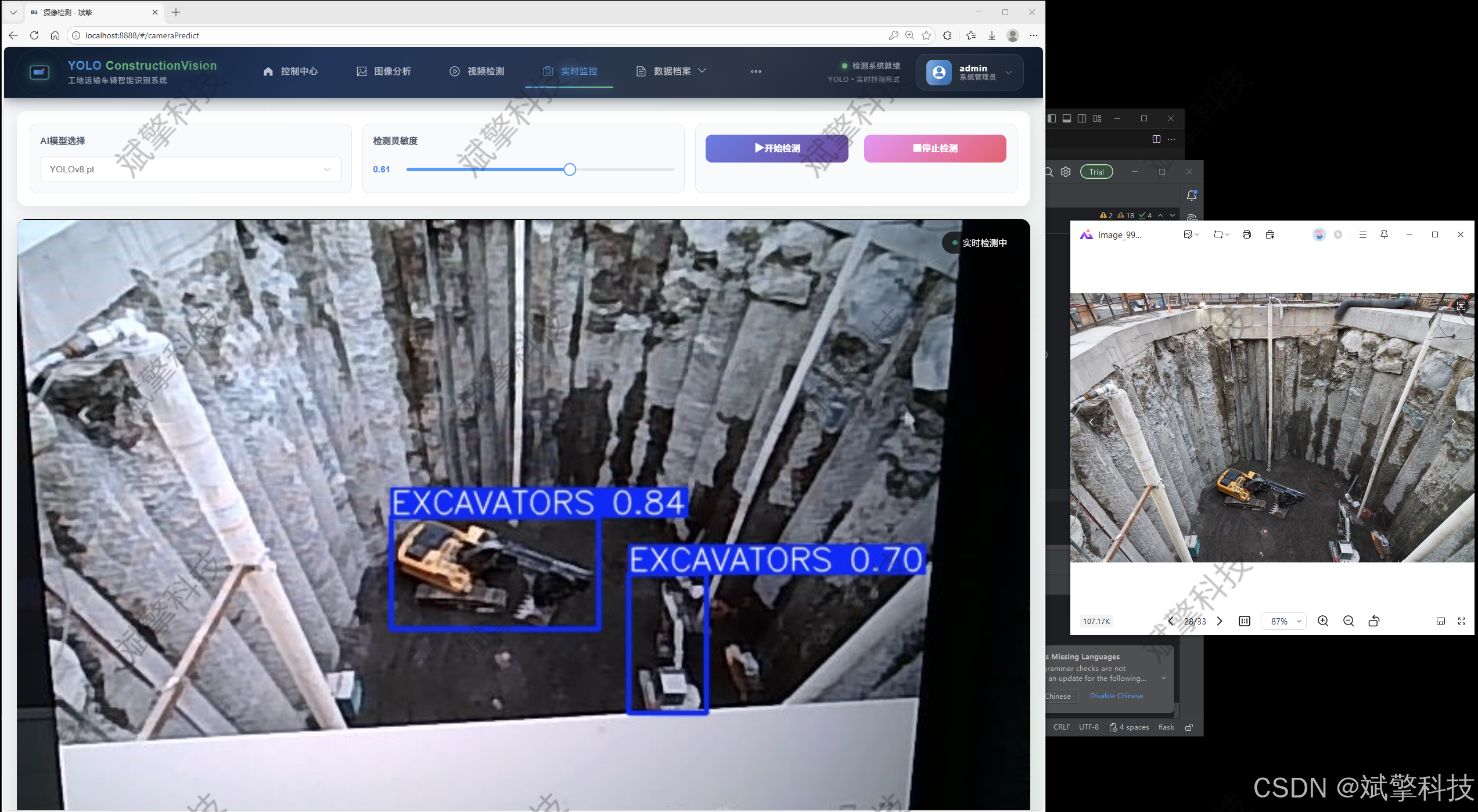
实时摄像头检测
-
-
数据管理可视化:
-
检测记录管理: 分别对图片、视频、摄像头检测产生的记录进行独立管理。
-
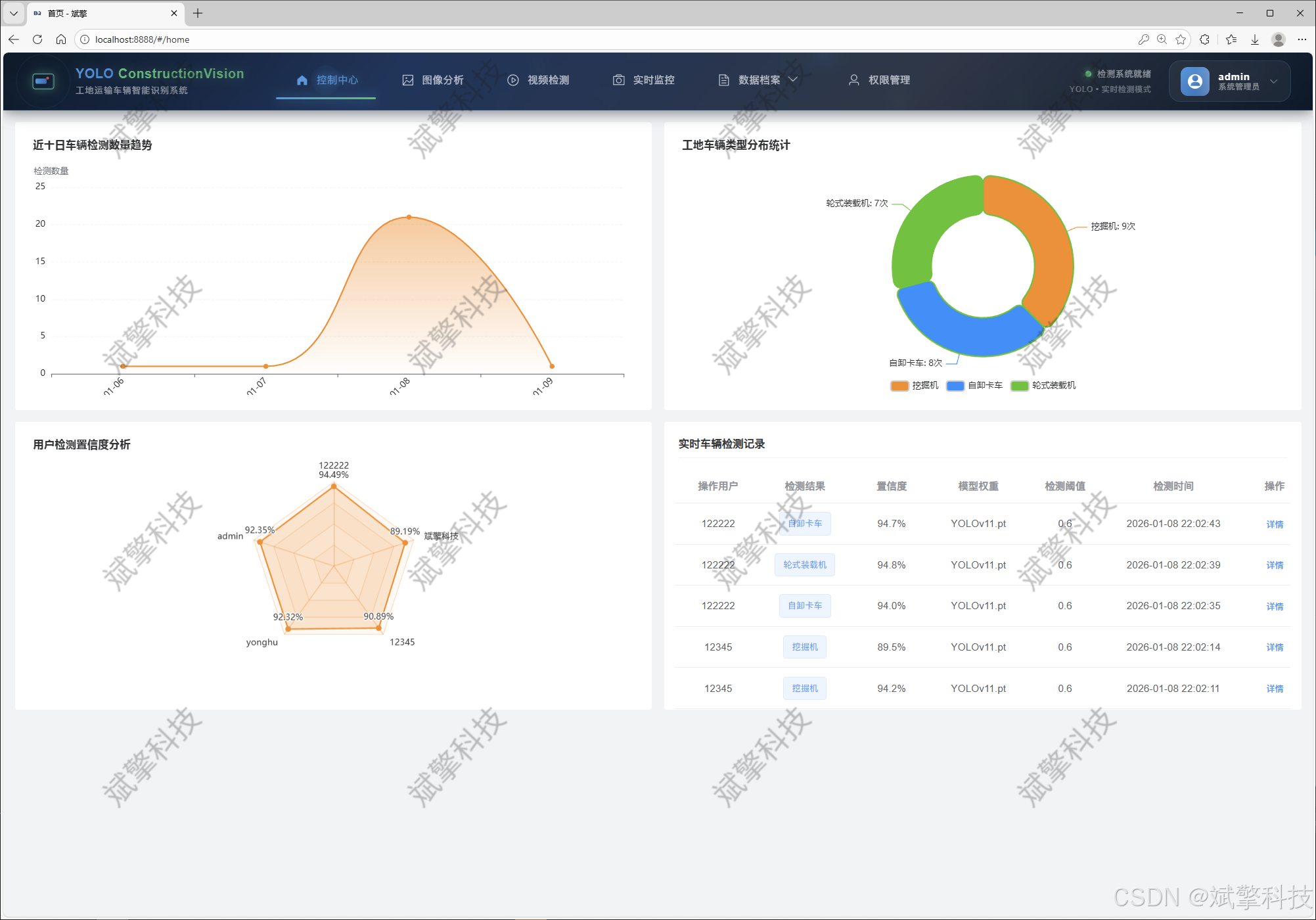
数据可视化: 通过ECharts等图表库,将车辆检测的统计数据以折线图、柱状图、饼图等形式直观展示,辅助管理者进行宏观决策。
-
-
智能分析集成(DeepSeek): 在检测流程中,系统将视觉检测结果(边界框、类别、置信度)作为输入,调用DeepSeek API,请求其对当前场景进行解读。
3. 技术集成与创新点
-
多版本YOLO模型动态切换: 提供了灵活的模型选择策略,平衡了实时性与准确性,适应不同计算资源条件和检测需求。
-
DeepSeek多模态智能分析: 将大语言模型的强大语义理解能力与目标检测的精准定位能力相结合,实现了从“感知”到“认知”的跨越,输出更具管理价值的见解。
-
全链路数据持久化: 从用户操作到每一次检测结果,均结构化存入MySQL,保证了数据的完整性与可审计性,为后续的大数据分析与模型持续优化奠定了数据基础。
-
一站式Web管理平台: 将复杂的AI模型能力封装成易用的Web服务,降低了工地管理人员的使用门槛,实现了检测、管理、分析功能的有机统一。
二、 系统核心特性概述
功能模块
✅ 用户登录注册:支持密码检测,保存到MySQL数据库。
✅ 支持四种YOLO模型切换,YOLOv8、YOLOv10、YOLOv11、YOLOv12。
✅ 信息可视化,数据可视化。
✅ 图片检测支持AI分析功能,deepseek
✅ 支持图像检测、视频检测和摄像头实时检测,检测结果保存到MySQL数据库。
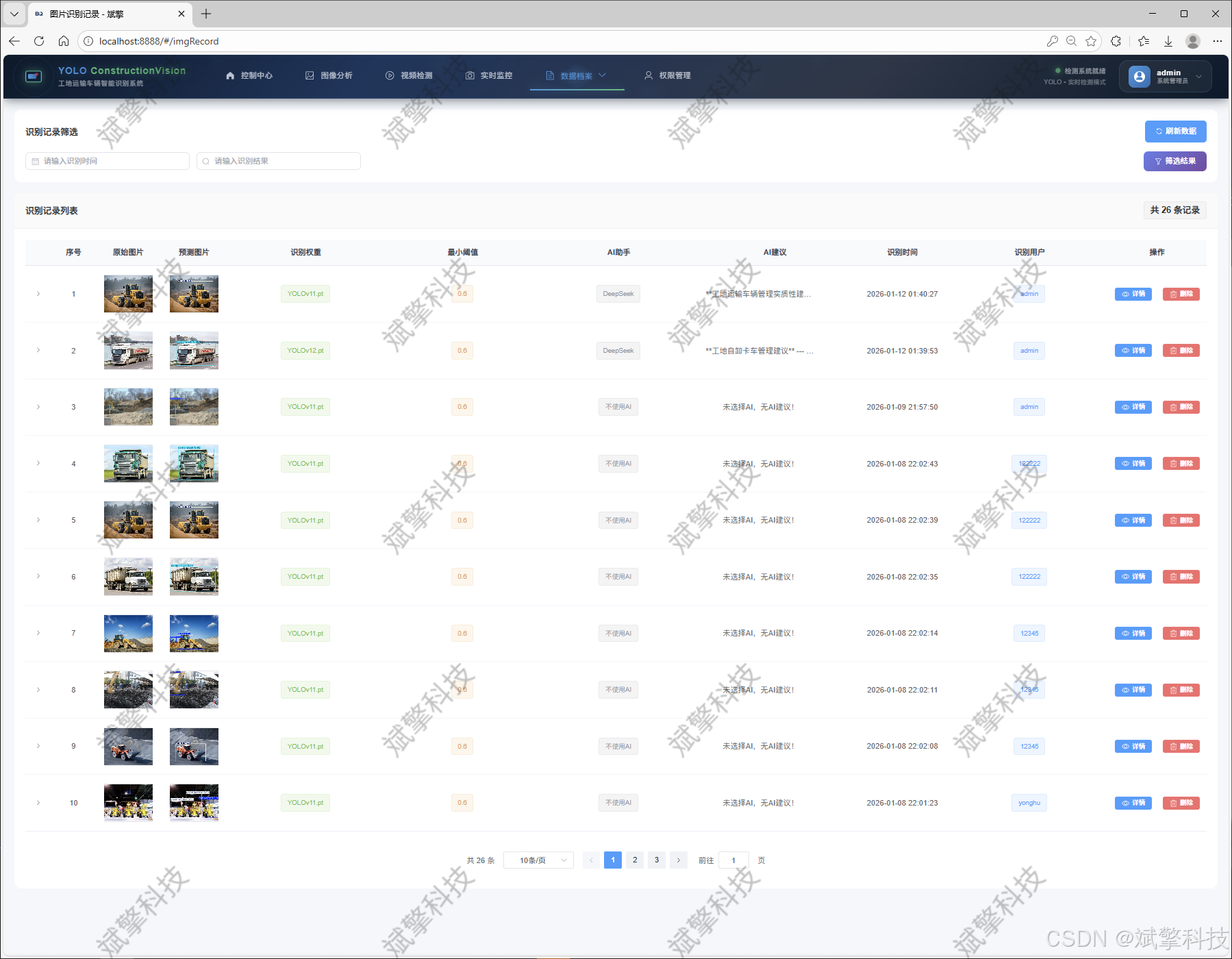
✅ 图片识别记录管理、视频识别记录管理和摄像头识别记录管理。
✅ 用户管理模块,管理员可以对用户进行增删改查。
✅ 个人中心,可以修改自己的信息,密码姓名头像等等。
登录注册模块
可视化模块
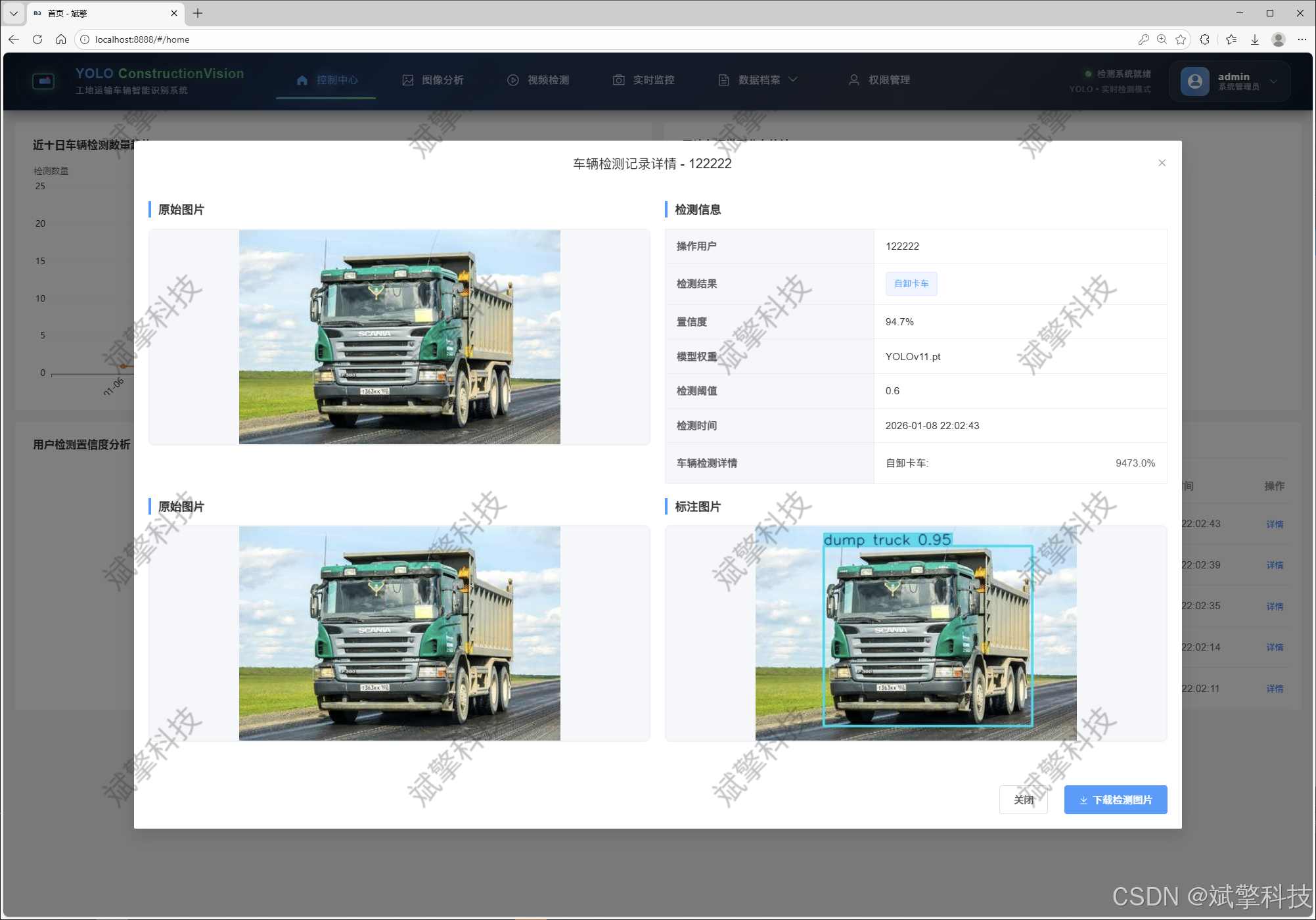
图像检测模块
-
YOLO模型集成 (v8/v10/v11/v12)
-
DeepSeek多模态分析
-
支持格式:JPG/PNG/MP4/RTSP
视频检测模块
实时检测模块
图片识别记录管理
视频识别记录管理
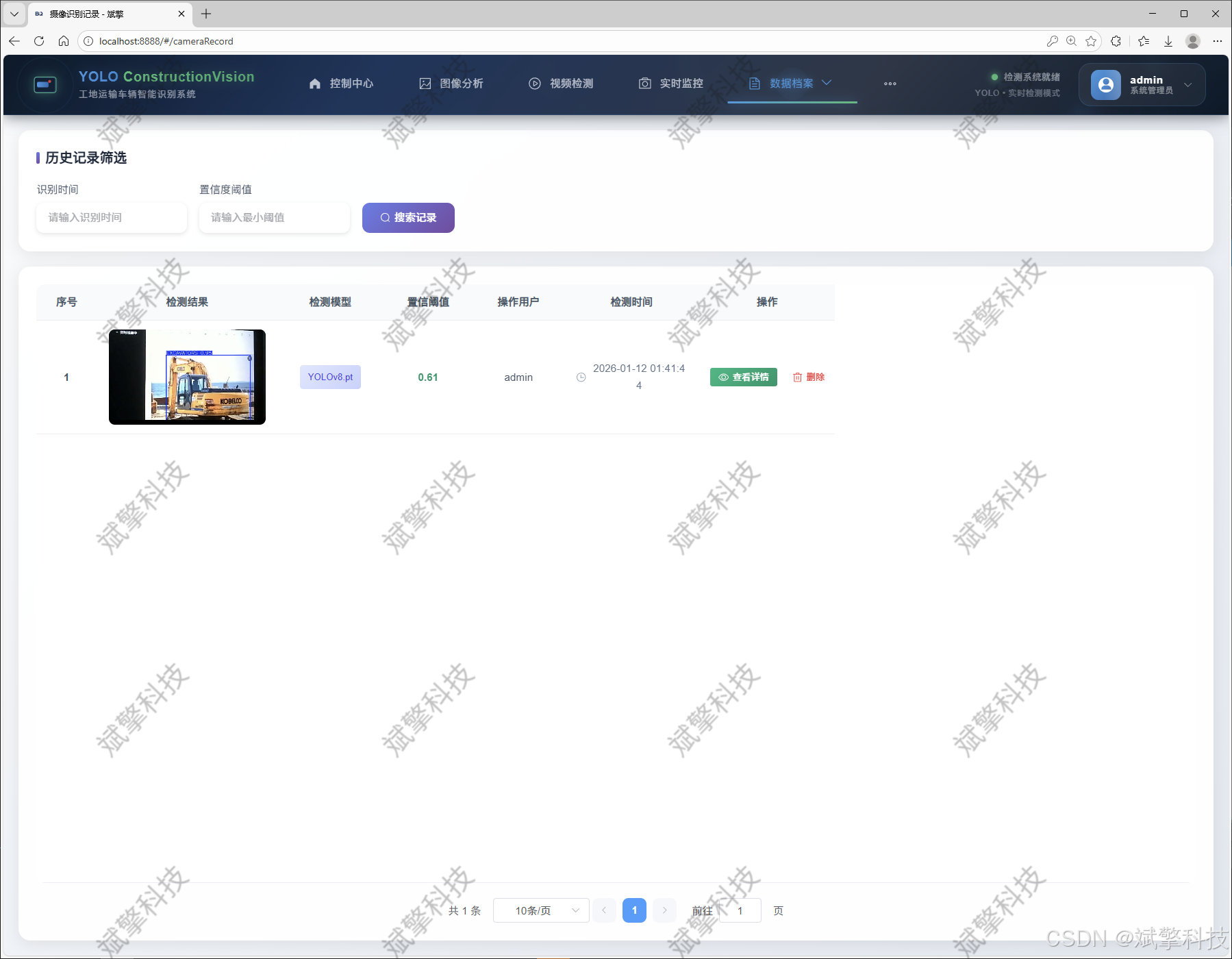
摄像头识别记录管理
用户管理模块
数据管理模块(MySQL表设计)
-
users- 用户信息表

-
imgrecords- 图片检测记录表
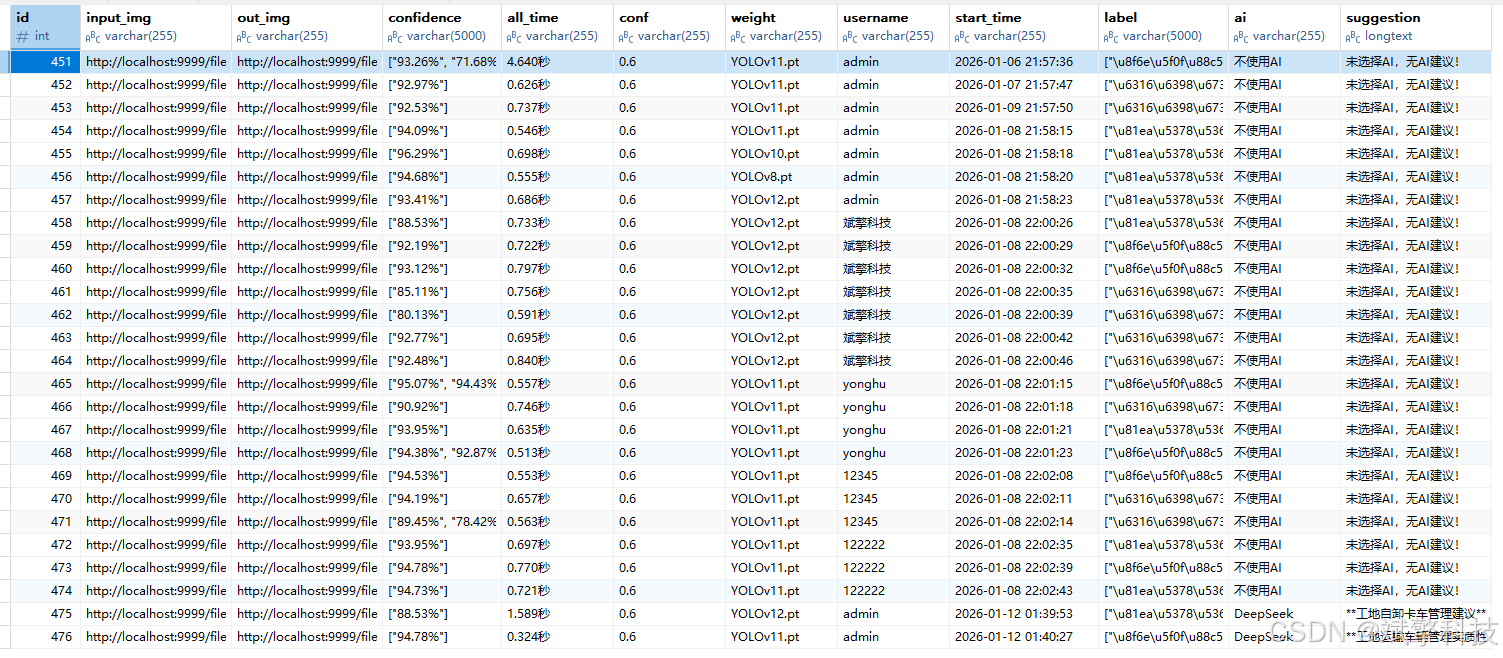
-
videorecords- 视频检测记录表

-
camerarecords- 摄像头检测记录表

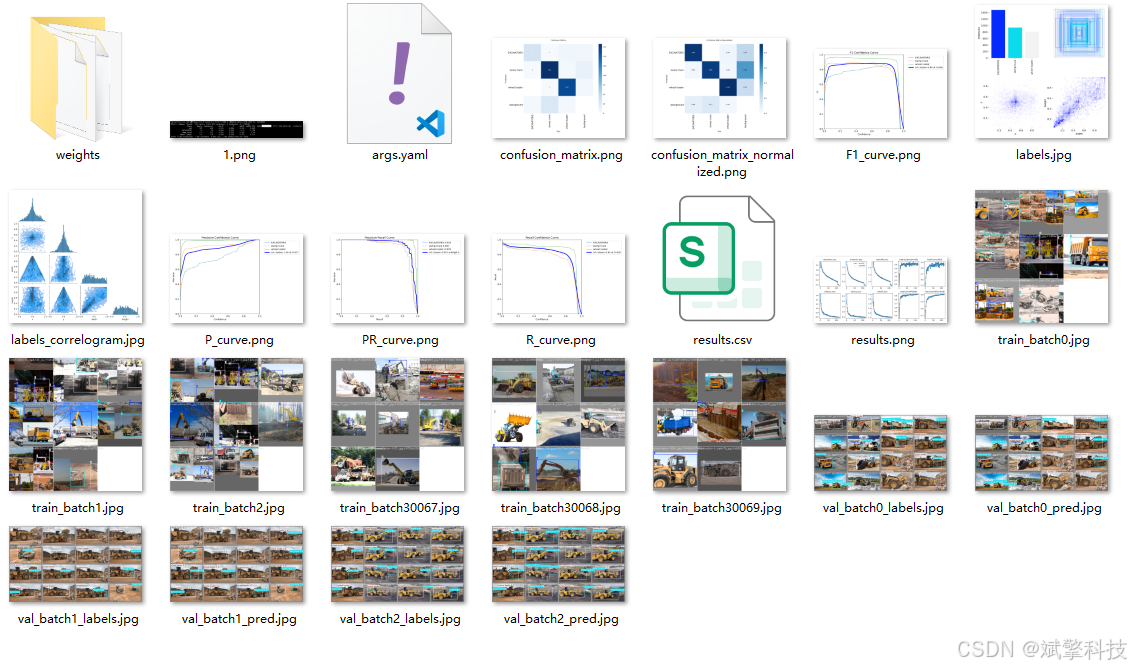
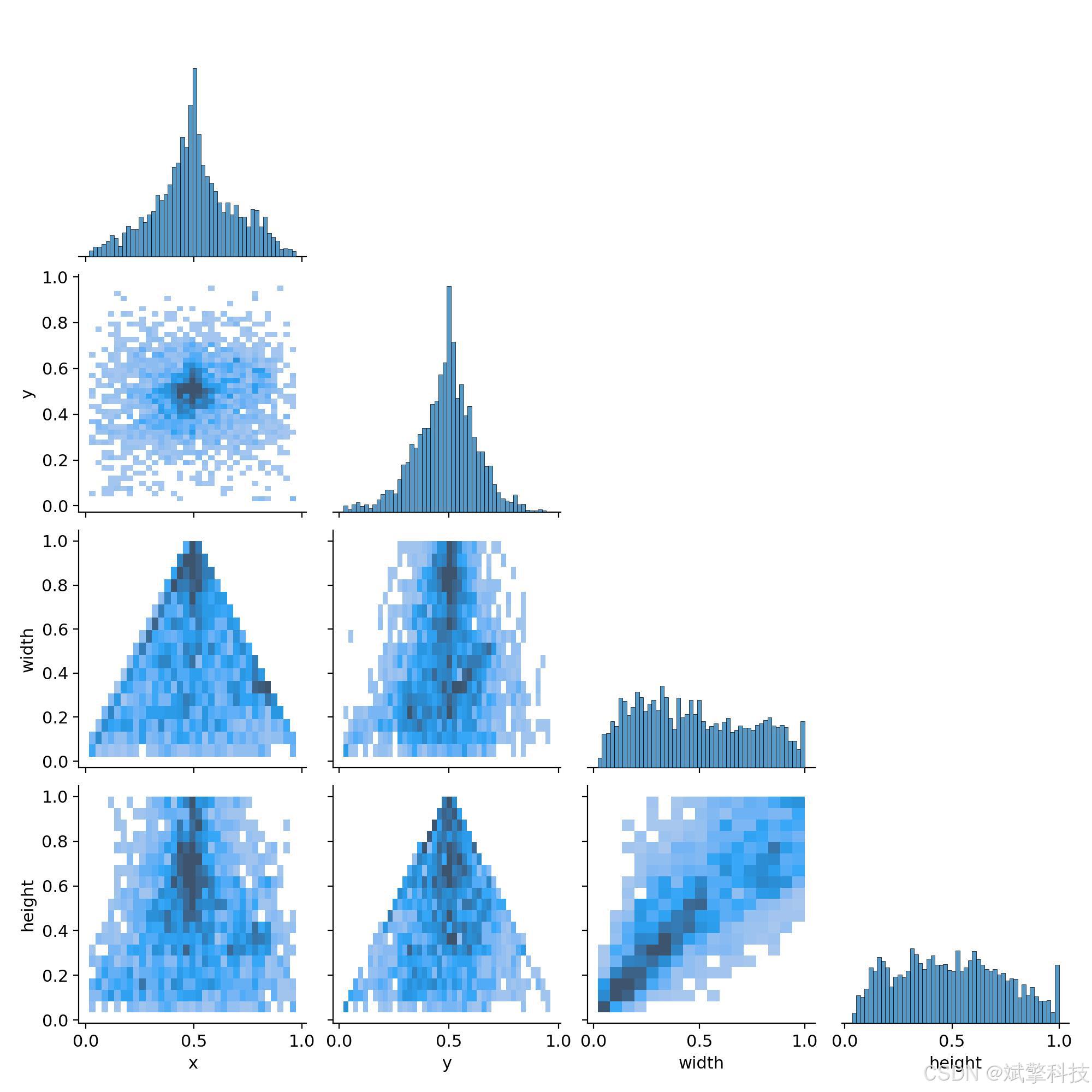
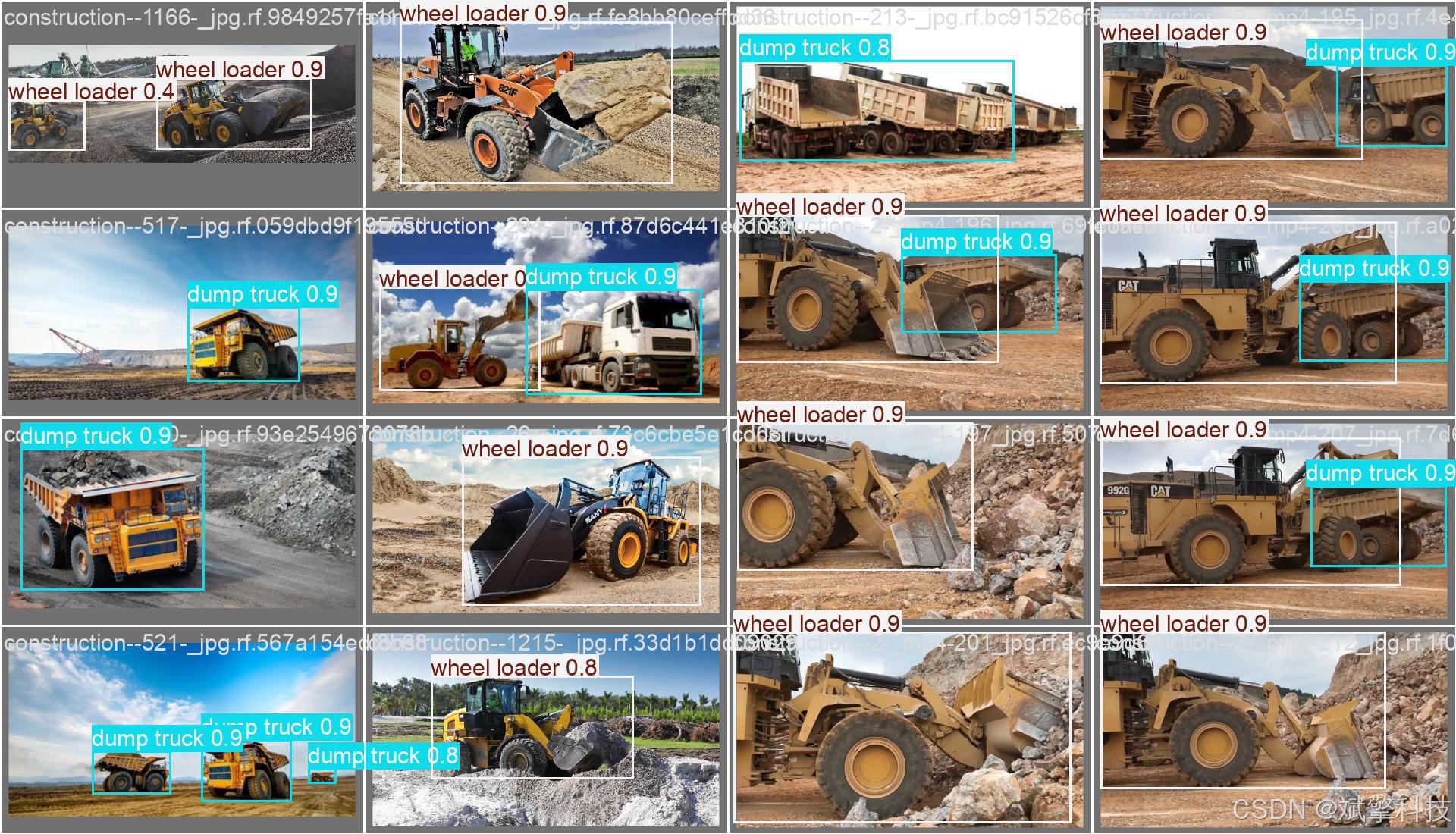
模型训练结果
#coding:utf-8
#根据实际情况更换模型
# yolon.yaml (nano):轻量化模型,适合嵌入式设备,速度快但精度略低。
# yolos.yaml (small):小模型,适合实时任务。
# yolom.yaml (medium):中等大小模型,兼顾速度和精度。
# yolob.yaml (base):基本版模型,适合大部分应用场景。
# yolol.yaml (large):大型模型,适合对精度要求高的任务。
from ultralytics import YOLO
model_path = 'pt/yolo12s.pt'
data_path = 'data.yaml'
if __name__ == '__main__':
model = YOLO(model_path)
results = model.train(data=data_path,
epochs=500,
batch=64,
device='0',
workers=0,
project='runs',
name='exp',
)


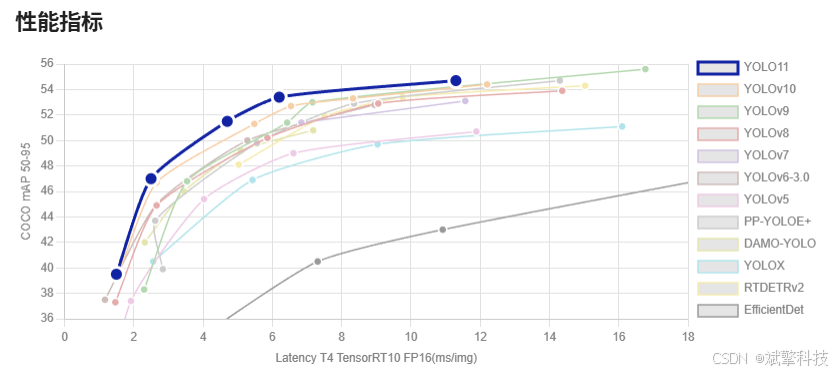
YOLO概述
YOLOv8
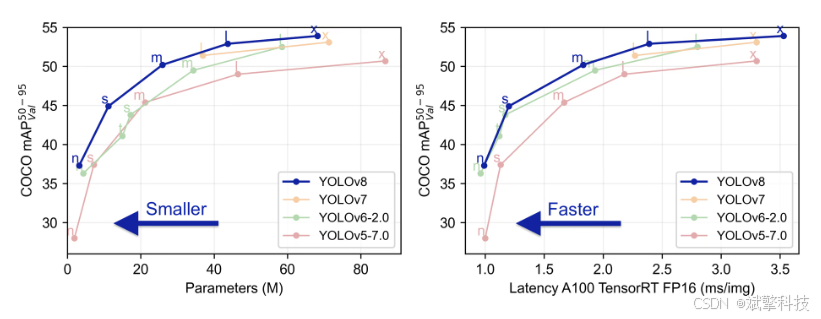
YOLOv8 由 Ultralytics 于 2023 年 1 月 10 日发布,在准确性和速度方面提供了尖端性能。基于先前 YOLO 版本的进步,YOLOv8 引入了新功能和优化,使其成为各种应用中目标检测任务的理想选择。
YOLOv8 的主要特性
- 高级骨干和颈部架构: YOLOv8 采用最先进的骨干和颈部架构,从而改进了特征提取和目标检测性能。
- 无锚点分离式 Ultralytics Head: YOLOv8 采用无锚点分离式 Ultralytics head,与基于锚点的方法相比,这有助于提高准确性并提高检测效率。
- 优化的准确性-速度权衡: YOLOv8 专注于在准确性和速度之间保持最佳平衡,适用于各种应用领域中的实时对象检测任务。
- 丰富的预训练模型: YOLOv8提供了一系列预训练模型,以满足各种任务和性能要求,使您更容易为特定用例找到合适的模型。
YOLOv10
YOLOv10 由 清华大学研究人员基于 Ultralytics Python构建,引入了一种新的实时目标检测方法,解决了先前 YOLO 版本中存在的后处理和模型架构缺陷。通过消除非极大值抑制 (NMS) 并优化各种模型组件,YOLOv10 以显著降低的计算开销实现了最先进的性能。大量实验表明,它在多个模型尺度上都具有卓越的精度-延迟权衡。
概述
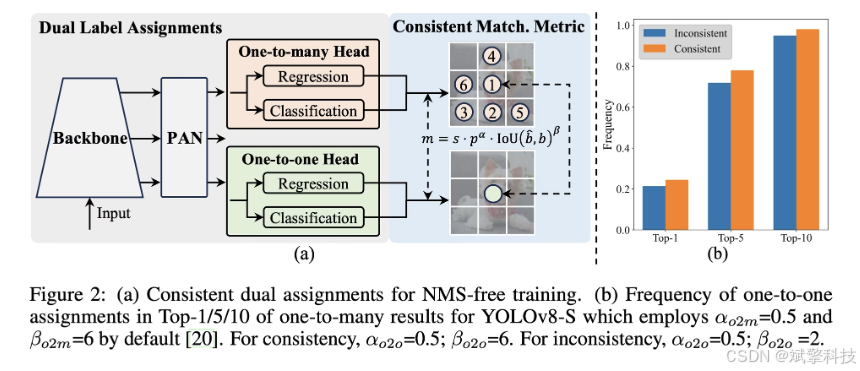
实时目标检测旨在以低延迟准确预测图像中的对象类别和位置。YOLO 系列因其在性能和效率之间的平衡而一直处于这项研究的前沿。然而,对 NMS 的依赖和架构效率低下阻碍了最佳性能。YOLOv10 通过引入用于无 NMS 训练的一致双重分配和整体效率-准确性驱动的模型设计策略来解决这些问题。
架构
YOLOv10 的架构建立在之前 YOLO 模型优势的基础上,同时引入了几项关键创新。该模型架构由以下组件组成:
- 骨干网络:负责特征提取,YOLOv10 中的骨干网络使用增强版的 CSPNet (Cross Stage Partial Network),以改善梯度流并减少计算冗余。
- Neck:Neck 的设计目的是聚合来自不同尺度的特征,并将它们传递到 Head。它包括 PAN(路径聚合网络)层,用于有效的多尺度特征融合。
- One-to-Many Head:在训练期间为每个对象生成多个预测,以提供丰富的监督信号并提高学习准确性。
- 一对一头部:在推理时为每个对象生成一个最佳预测,以消除对NMS的需求,从而降低延迟并提高效率。
主要功能
- 免NMS训练:利用一致的双重分配来消除对NMS的需求,从而降低推理延迟。
- 整体模型设计:从效率和准确性的角度对各种组件进行全面优化,包括轻量级分类 Head、空间通道解耦下采样和秩引导块设计。
- 增强的模型功能: 结合了大内核卷积和部分自注意力模块,以提高性能,而无需显着的计算成本。
YOLOv11
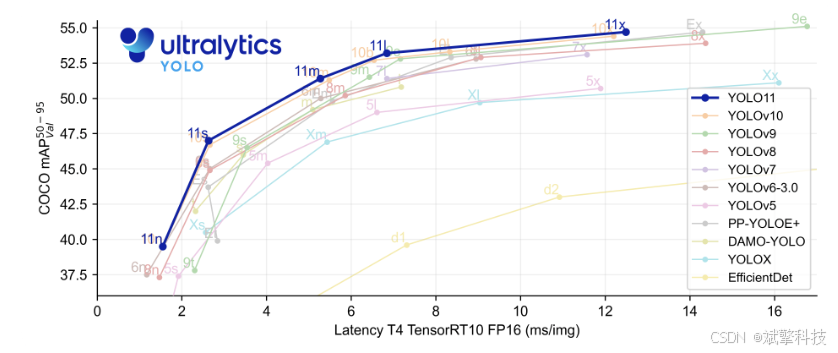
YOLO11 是 Ultralytics YOLO 系列实时目标检测器的最新迭代版本,它以前沿的精度、速度和效率重新定义了可能性。YOLO11 在之前 YOLO 版本的显著进步基础上,在架构和训练方法上进行了重大改进,使其成为各种计算机视觉任务的多功能选择。
主要功能
- 增强的特征提取: YOLO11 采用改进的 backbone 和 neck 架构,从而增强了特征提取能力,以实现更精确的目标检测和复杂的任务性能。
- 优化效率和速度: YOLO11 引入了改进的架构设计和优化的训练流程,从而提供更快的处理速度,并在精度和性能之间保持最佳平衡。
- 更高精度,更少参数: 随着模型设计的进步,YOLO11m 在 COCO 数据集上实现了更高的 平均精度均值(mAP),同时比 YOLOv8m 少用 22% 的参数,在不牺牲精度的情况下提高了计算效率。
- 跨环境的适应性: YOLO11 可以无缝部署在各种环境中,包括边缘设备、云平台和支持 NVIDIA GPU 的系统,从而确保最大的灵活性。
- 广泛支持的任务范围: 无论是目标检测、实例分割、图像分类、姿势估计还是旋转框检测 (OBB),YOLO11 都旨在满足各种计算机视觉挑战。
Ultralytics YOLO11 在其前代产品的基础上进行了多项重大改进。主要改进包括:
- 增强的特征提取: YOLO11 采用了改进的骨干网络和颈部架构,增强了特征提取能力,从而实现更精确的目标检测。
- 优化的效率和速度: 改进的架构设计和优化的训练流程提供了更快的处理速度,同时保持了准确性和性能之间的平衡。
- 更高精度,更少参数: YOLO11m 在 COCO 数据集上实现了更高的平均 精度均值 (mAP),同时比 YOLOv8m 少用 22% 的参数,在不牺牲精度的情况下提高了计算效率。
- 跨环境的适应性: YOLO11 可以部署在各种环境中,包括边缘设备、云平台和支持 NVIDIA GPU 的系统。
- 广泛支持的任务范围: YOLO11 支持各种计算机视觉任务,例如目标检测、实例分割、图像分类、姿势估计和旋转框检测 (OBB)。
YOLOv12
YOLO12引入了一种以注意力为中心的架构,它不同于之前YOLO模型中使用的传统基于CNN的方法,但仍保持了许多应用所需的实时推理速度。该模型通过在注意力机制和整体网络架构方面的新颖方法创新,实现了最先进的目标检测精度,同时保持了实时性能。尽管有这些优势,YOLO12仍然是一个社区驱动的版本,由于其沉重的注意力模块,可能表现出训练不稳定、内存消耗增加和CPU吞吐量较慢的问题,因此Ultralytics仍然建议将YOLO11用于大多数生产工作负载。
主要功能
- 区域注意力机制: 一种新的自注意力方法,可以有效地处理大型感受野。它将 特征图 分成 l 个大小相等的区域(默认为 4 个),水平或垂直,避免复杂的运算并保持较大的有效感受野。与标准自注意力相比,这大大降低了计算成本。
- 残差高效层聚合网络(R-ELAN):一种基于 ELAN 的改进的特征聚合模块,旨在解决优化挑战,尤其是在更大规模的以注意力为中心的模型中。R-ELAN 引入:
- 具有缩放的块级残差连接(类似于层缩放)。
- 一种重新设计的特征聚合方法,创建了一个类似瓶颈的结构。
- 优化的注意力机制架构:YOLO12 精简了标准注意力机制,以提高效率并与 YOLO 框架兼容。这包括:
- 使用 FlashAttention 来最大限度地减少内存访问开销。
- 移除位置编码,以获得更简洁、更快速的模型。
- 调整 MLP 比率(从典型的 4 调整到 1.2 或 2),以更好地平衡注意力和前馈层之间的计算。
- 减少堆叠块的深度以改进优化。
- 利用卷积运算(在适当的情况下)以提高其计算效率。
- 在注意力机制中添加一个7x7可分离卷积(“位置感知器”),以隐式地编码位置信息。
- 全面的任务支持: YOLO12 支持一系列核心计算机视觉任务:目标检测、实例分割、图像分类、姿势估计和旋转框检测 (OBB)。
- 增强的效率: 与许多先前的模型相比,以更少的参数实现了更高的准确率,从而证明了速度和准确率之间更好的平衡。
- 灵活部署: 专为跨各种平台部署而设计,从边缘设备到云基础设施。
主要改进
-
增强的 特征提取:
- 区域注意力: 有效处理大型感受野,降低计算成本。
- 优化平衡: 改进了注意力和前馈网络计算之间的平衡。
- R-ELAN:使用 R-ELAN 架构增强特征聚合。
-
优化创新:
- 残差连接:引入具有缩放的残差连接以稳定训练,尤其是在较大的模型中。
- 改进的特征集成:在 R-ELAN 中实现了一种改进的特征集成方法。
- FlashAttention: 整合 FlashAttention 以减少内存访问开销。
-
架构效率:
- 减少参数:与之前的许多模型相比,在保持或提高准确性的同时,实现了更低的参数计数。
- 简化的注意力机制:使用简化的注意力实现,避免了位置编码。
- 优化的 MLP 比率:调整 MLP 比率以更有效地分配计算资源。
前端代码展示
首页界面一小部分代码:
// 折线图 - 近十日检测数量
const initLineChart = () => {
if (!state.global.dispose.some((b: any) => b === state.global.homeChartOne)) state.global.homeChartOne?.dispose();
state.global.homeChartOne = markRaw(echarts.init(homeLineRef.value, state.charts.theme));
// 统计每天的检测数量
const counts: Record<string, number> = {};
state.data.forEach((detection: any) => {
if (detection.startTime) {
const date = detection.startTime.split(' ')[0];
counts[date] = (counts[date] || 0) + 1;
}
});
const sortedDatesDesc = Object.keys(counts).sort((a, b) => b.localeCompare(a));
const latestDatesDesc = sortedDatesDesc.slice(0, 10);
const latestDates = latestDatesDesc.sort((a, b) => a.localeCompare(b));
const result = {
dateData: latestDates,
valueData: latestDates.map(date => counts[date])
};
const option = {
backgroundColor: state.charts.bgColor,
title: {
text: '近十日车辆检测数量趋势',
x: 'left',
textStyle: { fontSize: 15, color: state.charts.color },
},
grid: { top: 70, right: 20, bottom: 30, left: 30 },
tooltip: {
trigger: 'axis',
formatter: (params: any) => {
const data = params[0];
return `${data.name}<br/>车辆检测数量: ${data.value}`;
}
},
xAxis: {
data: result.dateData,
axisLabel: {
color: state.charts.color,
rotate: 45
},
},
yAxis: [
{
type: 'value',
name: '检测数量',
splitLine: { show: true, lineStyle: { type: 'dashed', color: state.charts.theme === 'dark' ? '#444' : '#f5f5f5' } },
axisLabel: {
color: state.charts.color,
},
},
],
series: [
{
name: '车辆检测数量',
type: 'line',
symbolSize: 6,
symbol: 'circle',
smooth: true,
data: result.valueData,
lineStyle: { color: '#fa8c16' }, // 使用橙色(挖掘机颜色)作为主色调
itemStyle: { color: '#fa8c16', borderColor: '#fa8c16' },
areaStyle: {
color: new echarts.graphic.LinearGradient(0, 0, 0, 1, [
{ offset: 0, color: '#fa8c16b3' },
{ offset: 1, color: '#fa8c1603' },
]),
},
},
],
};
state.global.homeChartOne.setOption(option);
state.myCharts.push(state.global.homeChartOne);
};
// 饼图 - 车辆类型分布
const initPieChart = () => {
if (!state.global.dispose.some((b: any) => b === state.global.homeChartTwo)) state.global.homeChartTwo?.dispose();
state.global.homeChartTwo = markRaw(echarts.init(homePieRef.value, state.charts.theme));
const vehicleCounts: Record<string, number> = {};
state.data.forEach((detection: any) => {
try {
const labels = JSON.parse(detection.label || '[]');
if (labels.length > 0) {
const vehicleIndex = parseInt(labels[0]);
if (vehicleIndex >= 0 && vehicleIndex < VEHICLE_TYPES.length) {
const vehicle = VEHICLE_TYPES[vehicleIndex];
vehicleCounts[vehicle] = (vehicleCounts[vehicle] || 0) + 1;
} else if (labels[0] in VEHICLE_COLORS) {
// 如果已经是车辆名称
vehicleCounts[labels[0]] = (vehicleCounts[labels[0]] || 0) + 1;
}
}
} catch {
// 如果解析失败,尝试直接使用
if (detection.label in VEHICLE_COLORS) {
vehicleCounts[detection.label] = (vehicleCounts[detection.label] || 0) + 1;
}
}
});
// 确保所有车辆类型都有数据
VEHICLE_TYPES.forEach(vehicle => {
if (!vehicleCounts[vehicle]) {
vehicleCounts[vehicle] = 0;
}
});
const pieData = VEHICLE_TYPES.map(vehicle => ({
name: vehicle,
value: vehicleCounts[vehicle],
itemStyle: {
color: VEHICLE_COLORS[vehicle]
}
})).filter(item => item.value > 0);
const option = {
backgroundColor: state.charts.bgColor,
title: {
text: '工地车辆类型分布统计',
x: 'left',
textStyle: { fontSize: '15', color: state.charts.color },
},
legend: {
top: 'bottom',
textStyle: {
color: state.charts.color
}
},
tooltip: {
trigger: 'item',
formatter: '{a} <br/>{b}: {c}次 ({d}%)'
},
series: [
{
type: 'pie',
radius: ['40%', '70%'],
center: ['50%', '50%'],
avoidLabelOverlap: true,
itemStyle: {
borderRadius: 10,
borderColor: state.charts.bgColor,
borderWidth: 2
},
label: {
show: true,
formatter: '{b}: {c}次',
color: state.charts.color
},
emphasis: {
label: {
show: true,
fontSize: '14',
fontWeight: 'bold'
}
},
data: pieData
}
]
};
state.global.homeChartTwo.setOption(option);
state.myCharts.push(state.global.homeChartTwo);
};后端代码展示
详细功能展示视频
基于深度学习和千问|DeepSeek的工地运输车检测系统(web界面+YOLOv8/YOLOv10/YOLOv11/YOLOv12+前后端分离+python)_哔哩哔哩_bilibili
https://www.bilibili.com/video/BV1uJcsz6EeL/

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 6
6 0
0- 0



 已为社区贡献236条内容
已为社区贡献236条内容

所有评论(0)