永磁同步电机SVPWM无位置算法控制仿真Simulink模型探索
永磁同步电机SVPWM无位置算法控制仿真simulink模型。 滑膜锁相环,邮箱发送。
最近在研究永磁同步电机(PMSM)相关控制算法,今天来跟大家分享下SVPWM无位置算法控制仿真以及滑膜锁相环,最后还会涉及到邮箱发送相关内容,希望对同样在钻研这块的小伙伴有所帮助。
永磁同步电机SVPWM无位置算法控制仿真
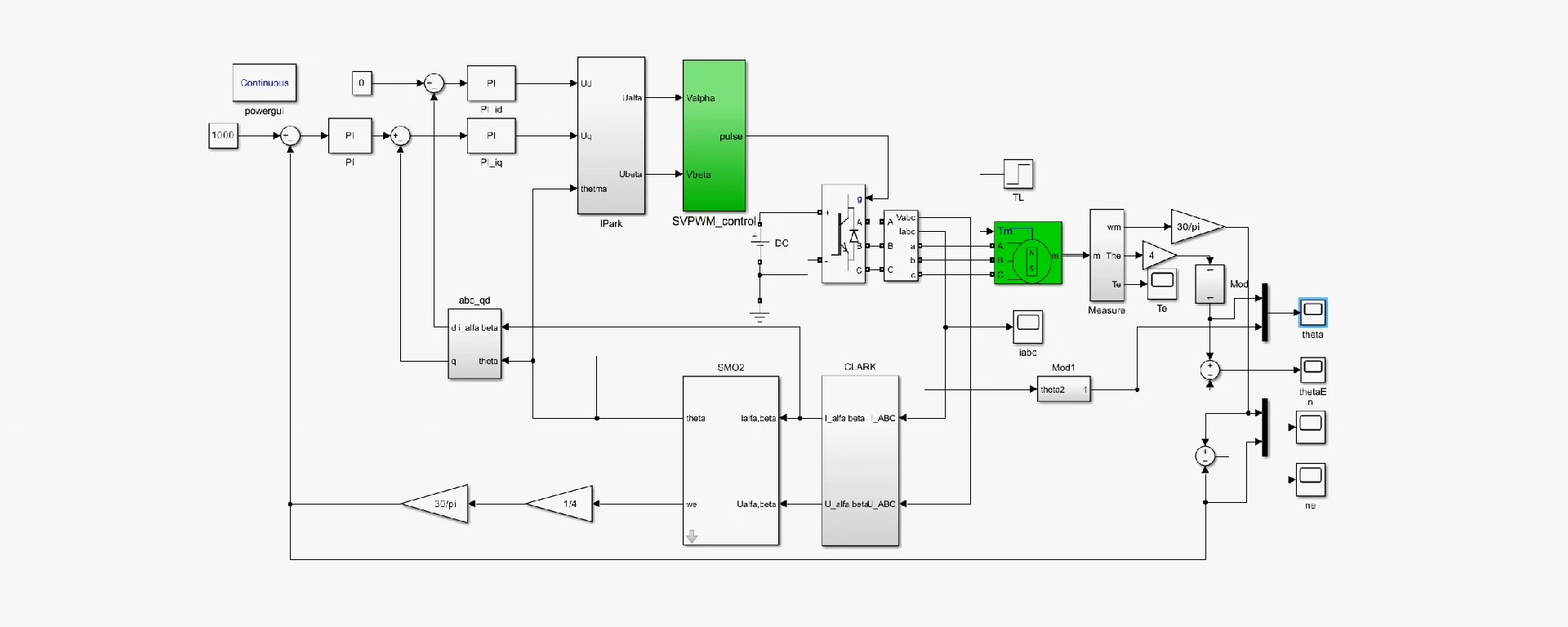
永磁同步电机以其高效、高功率密度等优点,在工业驱动领域应用广泛。而SVPWM(空间矢量脉宽调制)技术能有效提高直流电压利用率,减少电机转矩脉动,是PMSM控制中常用的调制方式。无位置传感器算法则避免了使用位置传感器带来的成本增加、可靠性降低等问题。
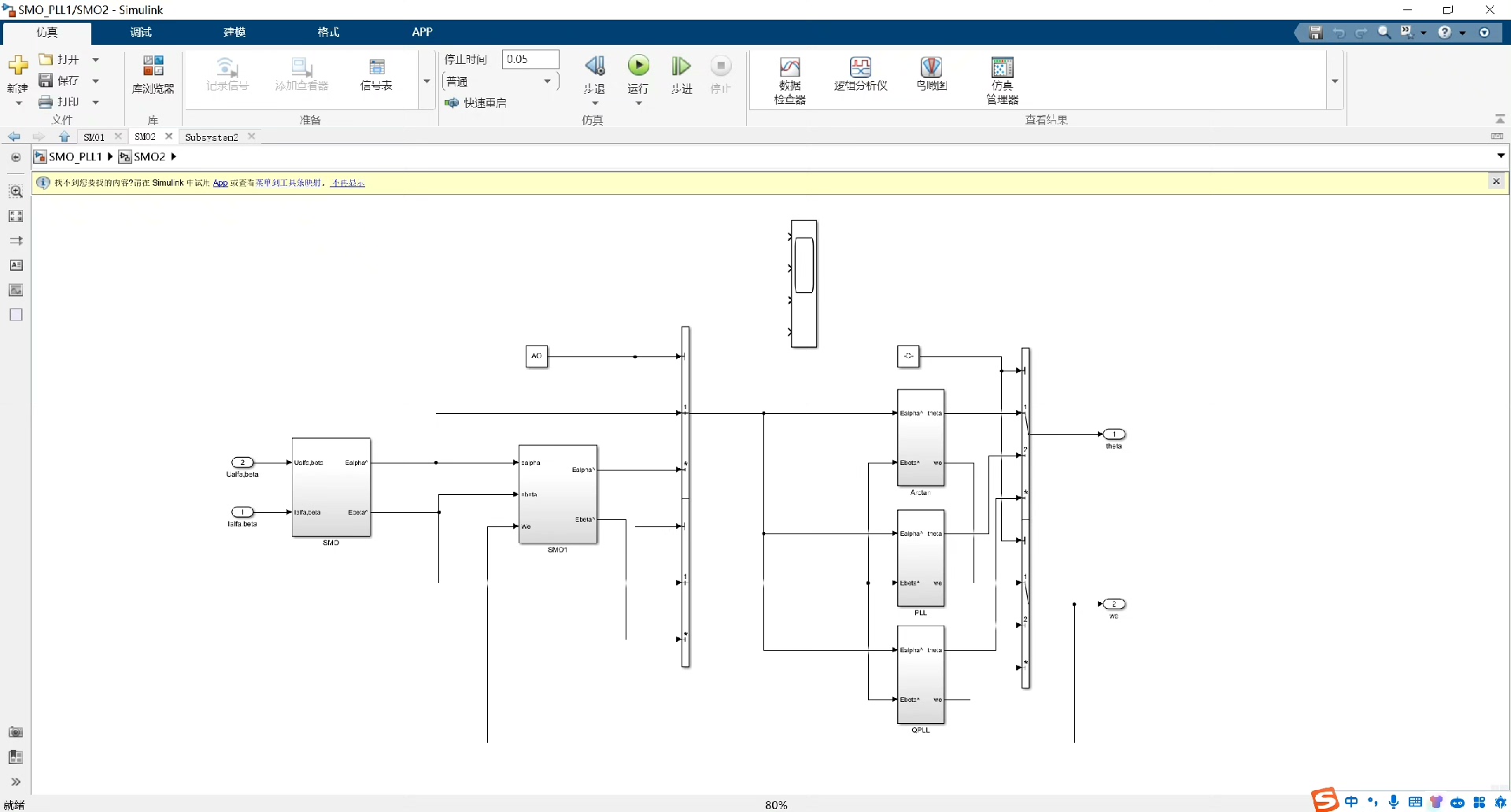
在Simulink中搭建SVPWM无位置算法控制模型,主要模块包括:电机模型、坐标变换模块、速度和电流控制器、SVPWM生成模块以及无位置传感器算法模块。
电机模型
在Simulink中,我们可以利用Simscape Electrical库中的永磁同步电机模型。这里简单示例下代码调用(Matlab脚本调用Simscape模型,实际模型搭建在Simulink中操作):
% 创建并打开模型
open_system('PMSM_SVPWM_Sensorless.slx');
% 获取电机模型参数
model = 'PMSM_Sensorless';
motor = get_param([model '/Permanent - Magnet Synchronous Machine'],'Object');
R = motor.R; % 定子电阻
Ld = motor.Ld; % d轴电感
Lq = motor.Lq; % q轴电感这段代码展示了如何获取电机模型的基本参数,定子电阻、d轴电感和q轴电感,这些参数对于后续控制算法的设计和调整至关重要。
坐标变换模块
坐标变换是将电机在三相静止坐标系下的物理量转换到两相旋转坐标系下,便于控制。常用的变换有Clark变换和Park变换。
% Clark变换
function [alpha, beta] = clark(a, b, c)
alpha = a;
beta = (sqrt(3)/2)*(b - c);
end
% Park变换
function [d, q] = park(alpha, beta, theta)
d = alpha*cos(theta) + beta*sin(theta);
q = -alpha*sin(theta) + beta*cos(theta);
endClark变换将三相电流转换为两相静止坐标系下的电流,而Park变换则进一步将其转换到两相旋转坐标系下。这里theta为转子位置角,在无位置传感器算法中,这个角度需要通过估算得到。
速度和电流控制器
通常采用PI控制器来调节速度和电流。
classdef PIController
properties
Kp;
Ki;
integral;
end
methods
function obj = PIController(Kp, Ki)
obj.Kp = Kp;
obj.Ki = Ki;
obj.integral = 0;
end
function output = update(obj, setpoint, feedback)
error = setpoint - feedback;
obj.integral = obj.integral + error;
output = obj.Kp*error + obj.Ki*obj.integral;
end
end
end通过调整Kp(比例系数)和Ki(积分系数),可以优化控制器的性能,使电机的速度和电流能快速准确地跟踪给定值。
SVPWM生成模块
SVPWM模块根据给定的电压矢量合成期望的三相PWM波。这个模块在Simulink中有现成的模块可以使用,当然也可以自己编写代码实现。
% SVPWM扇区判断
function sector = getSector(Valpha, Vbeta)
if Vbeta >= 0
if Valpha >= 0
if Vbeta <= sqrt(3)*(1 - Valpha/2)
sector = 1;
else
sector = 2;
end
else
if Vbeta <= -sqrt(3)*Valpha/2
sector = 6;
else
sector = 1;
end
end
else
if Valpha >= 0
if -Vbeta <= sqrt(3)*(1 - Valpha/2)
sector = 3;
else
sector = 4;
end
else
if -Vbeta <= -sqrt(3)*Valpha/2
sector = 5;
else
sector = 4;
end
end
end
end这段代码通过给定的Valpha和Vbeta来判断当前处于SVPWM的哪个扇区,为后续的矢量作用时间计算做准备。
无位置传感器算法模块
无位置传感器算法有多种,这里以滑膜锁相环为例。
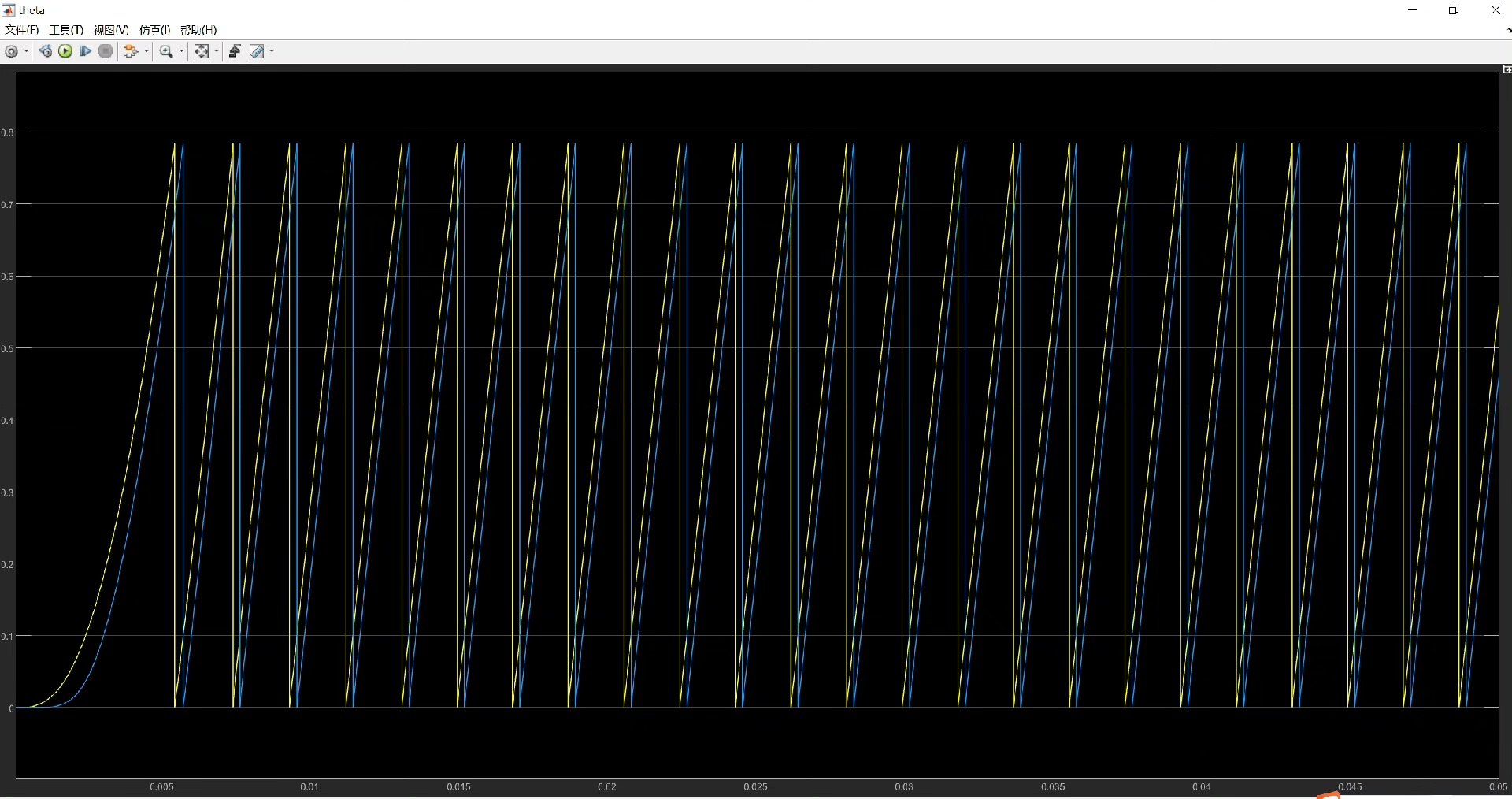
滑膜锁相环
滑膜锁相环(Sliding - Mode Phase - Locked Loop,SMPLL)常用于估算永磁同步电机的转子位置和速度。滑膜控制具有对参数变化和外部干扰不敏感的优点,适合在无位置传感器控制中应用。
永磁同步电机SVPWM无位置算法控制仿真simulink模型。 滑膜锁相环,邮箱发送。
在Matlab中实现滑膜锁相环的核心代码如下:
classdef SMPLL
properties
k; % 滑膜控制增益
omega_hat; % 估算角速度
theta_hat; % 估算角度
error; % 误差
end
methods
function obj = SMPLL(k)
obj.k = k;
obj.omega_hat = 0;
obj.theta_hat = 0;
obj.error = 0;
end
function [omega_hat, theta_hat] = update(obj, is, Valpha, Vbeta)
% 这里is为定子电流,Valpha, Vbeta为电压分量
% 滑膜面函数计算
s = is*sin(obj.theta_hat) - Valpha*cos(obj.theta_hat) + Vbeta*sin(obj.theta_hat);
% 估算角速度更新
obj.omega_hat = obj.omega_hat + obj.k*sign(s);
% 估算角度更新
obj.theta_hat = obj.theta_hat + obj.omega_hat;
omega_hat = obj.omega_hat;
theta_hat = obj.theta_hat;
end
end
end在这段代码中,通过滑膜面函数s来计算误差,并根据滑膜控制增益k更新估算的角速度omegahat和角度thetahat。随着电机运行,不断迭代更新这些值,从而较为准确地估算出转子位置和速度。
邮箱发送
在实际项目中,我们可能需要将仿真结果或者一些关键数据发送到指定邮箱,方便远程查看和分析。Matlab提供了sendmail函数来实现这个功能。
% 邮箱发送示例
sender = 'your_email@example.com';
password = 'your_password';
recipient ='recipient_email@example.com';
subject = 'PMSM SVPWM Sensorless Simulation Results';
message = 'Here are the simulation results of PMSM SVPWM sensorless control.';
attachment = 'PMSM_Simulation_Results.xlsx';
props = java.util.Properties;
props.setProperty('mail.smtp.auth', 'true');
props.setProperty('mail.smtp.starttls.enable', 'true');
props.setProperty('mail.smtp.host','smtp.example.com');
props.setProperty('mail.smtp.port', '587');
session = javax.mail.Session.getInstance(props, javax.mail.Authenticator(...
handle(~, ~)
javax.mail.PasswordAuthentication(sender, password);
end
));
msg = javax.mail.internet.MimeMessage(session);
msg.setFrom(javax.mail.internet.InternetAddress(sender));
msg.addRecipient(javax.mail.Message.RecipientType.TO, javax.mail.internet.InternetAddress(recipient));
msg.setSubject(subject);
msg.setText(message);
part = javax.mail.internet.MimeBodyPart;
part.attachFile(attachment);
multipart = javax.mail.internet.MimeMultipart;
multipart.addBodyPart(part);
msg.setContent(multipart);
javax.mail.Transport.send(msg);上述代码通过设置邮箱服务器、认证信息等,将包含仿真结果附件的邮件发送给指定收件人。这样即使不在仿真现场,也能及时获取相关数据。
以上就是永磁同步电机SVPWM无位置算法控制仿真Simulink模型以及滑膜锁相环、邮箱发送的相关内容啦,大家在实际操作中可以根据具体需求进一步优化和调整。希望能给大家带来一些启发,一起在电机控制领域探索更多有趣的东西!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 6
6 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)