单轮车辆 ABS 防抱死控制 Simulink 仿真模型探索
单轮车辆ABS防抱死控制Simulink仿真模型 1.可控制切换冰雪路面和开关ABS系统控制 2.仿真输出时域下的车速/轮速/制动距离/滑移率/控制信号曲线,可以配置车重/滑移率-摩擦系数曲线/主缸压力/制动效能因数等参数。 3.有基础说明文档
在汽车安全领域,ABS(防抱死制动系统)可谓是一项至关重要的技术。今天咱们就来聊聊如何构建一个单轮车辆 ABS 防抱死控制的 Simulink 仿真模型,这个模型具备一些很实用的功能。
一、功能特性
路面与 ABS 系统控制切换
这个模型可以轻松地在冰雪路面和正常路面之间切换,同时也能方便地控制 ABS 系统的开启与关闭。想象一下,在不同路况下,ABS 系统的工作状态对车辆制动性能有着巨大影响,而我们这个模型就能直观地展示这种差异。
丰富的仿真输出
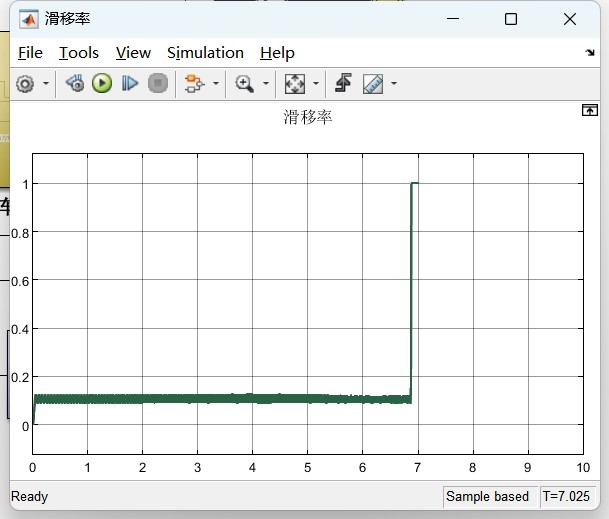
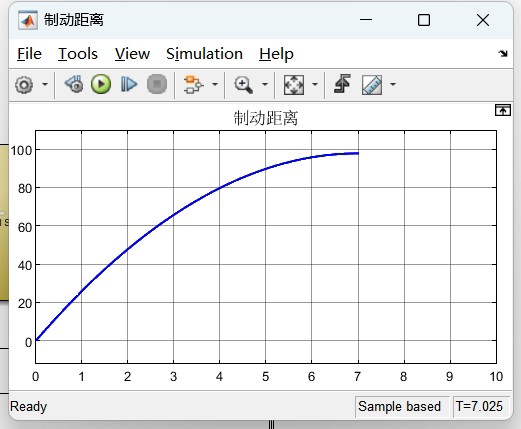
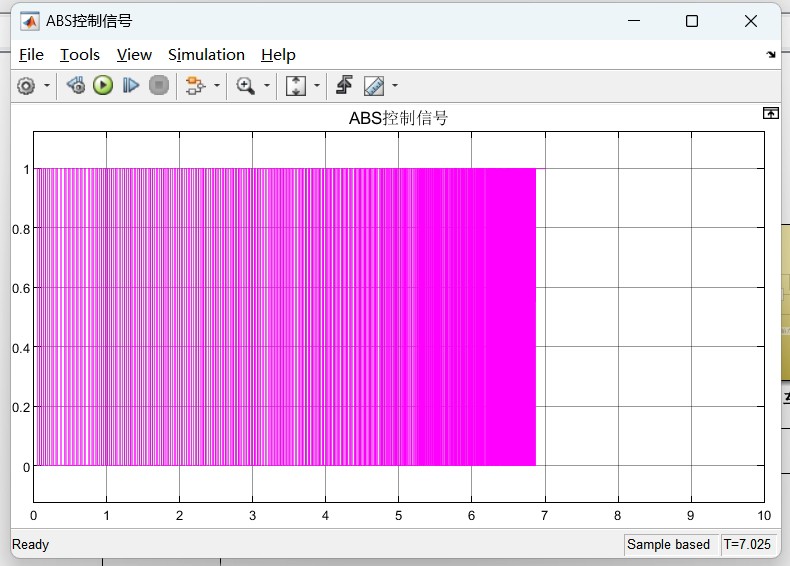
它能够输出时域下的车速、轮速、制动距离、滑移率以及控制信号曲线。并且,像车重、滑移率 - 摩擦系数曲线、主缸压力、制动效能因数等关键参数都可以自由配置。通过这些输出和参数配置,我们能深入了解车辆在各种条件下的制动特性。
基础说明文档
配套的基础说明文档,就像是模型的使用指南,无论是老手还是刚接触这块的新手,都能借助它快速上手,理解模型的工作原理和使用方法。
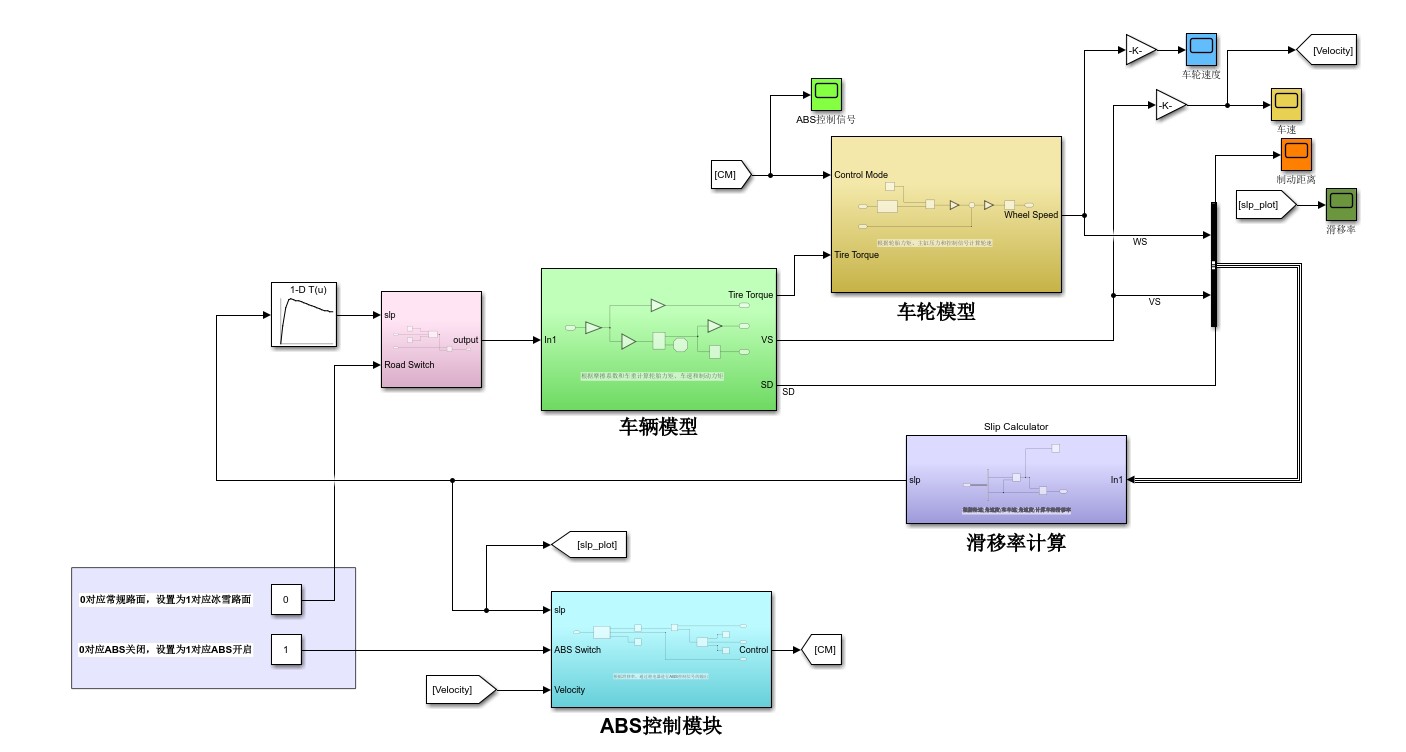
二、Simulink 模型搭建与代码分析
咱们先来看车速计算部分的代码(假设使用 S 函数来实现部分功能):
function [sys,x0,str,ts] = s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 1;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0 0];
function sys=mdlOutputs(t,x,u)
% u 假设为车轮转矩输入
% 简单的车速计算,这里假设车轮半径为 r
r = 0.3;
omega = u / (0.5 * 1000 * r^2); % 简单的转动惯量计算角速度
sys(1) = omega * r; % 计算车速这段代码是一个简单的 S 函数示例,在 Simulink 中它用于计算车速。首先在 mdlInitializeSizes 函数里设置了输入输出端口的数量等参数。在 mdlOutputs 函数中,根据输入的车轮转矩 u,通过简单的物理公式计算出车速 sys(1)。这里假设了车轮半径 r 为 0.3,并且用了一个简单的转动惯量公式计算角速度 omega,进而得到车速。
再看看滑移率计算部分,假设在 Simulink 中有一个自定义的模块来实现:
function y = slip_ratio_calculation(v, omega, r)
v_omega = omega * r;
if v_omega == 0
y = 1;
else
y = (v - v_omega) / v;
end
end这段代码很直观,slipratiocalculation 函数接收车速 v、车轮角速度 omega 和车轮半径 r 作为输入。它先计算出车轮线速度 vomega,然后根据滑移率的定义来计算滑移率 y。如果车轮线速度为 0,直接将滑移率设为 1;否则按照公式 (v - vomega) / v 计算。
三、参数配置与仿真输出曲线
在 Simulink 模型中,我们可以通过参数对话框方便地配置车重、滑移率 - 摩擦系数曲线等参数。比如车重参数的改变会影响车辆的惯性,进而影响制动距离和其他相关指标。
单轮车辆ABS防抱死控制Simulink仿真模型 1.可控制切换冰雪路面和开关ABS系统控制 2.仿真输出时域下的车速/轮速/制动距离/滑移率/控制信号曲线,可以配置车重/滑移率-摩擦系数曲线/主缸压力/制动效能因数等参数。 3.有基础说明文档
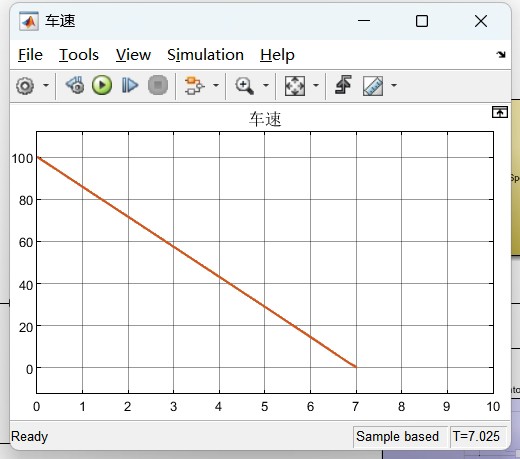
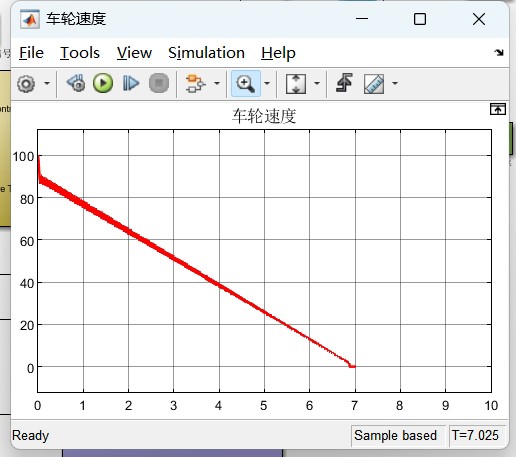
当我们运行仿真后,就能得到车速、轮速等时域曲线。这些曲线就像是车辆制动过程的“心电图”,清晰地展示了车辆在制动过程中的各种状态变化。例如车速曲线,能看到随着制动的进行,车速是如何逐渐降低的;滑移率曲线则能让我们了解到车轮在制动时的滑动状态,对于研究 ABS 系统如何防止车轮抱死有着重要意义。
总之,这个单轮车辆 ABS 防抱死控制 Simulink 仿真模型为我们研究车辆制动性能和 ABS 系统工作原理提供了一个非常好的平台。无论是做学术研究,还是对汽车技术感兴趣,都能从这个模型中挖掘出不少有趣的东西。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 2
2 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)