基于PI控制的PMSM永磁同步电机控制系统Simulink建模与仿真
基于PI控制的PMSM永磁同步电机控制系统simulink建模与仿真 1.功能介绍 基于PI控制的PMSM永磁同步电机控制系统simulink建模与仿真。 其中,基于PI(比例-积分)控制器的矢量控制策略因其简单、可靠的特点而被广泛采用。 永磁同步电机采用建模方式实现,不使用simulink的自带模型。 2.使用版本 matlab2022a 3.本作品包含内容 项目工程源文件/完整中文注释,程序操作方法视频(包含程序部分简要讲解), 仿真测试效果截图
永磁同步电机(PMSM)因其高效、高精度的特点,在工业自动化、电动汽车等领域得到了广泛应用。而基于PI控制的矢量控制策略,凭借其简单可靠的优势,成为了PMSM控制系统中常用的控制方法。本文将基于MATLAB 2022a版本,详细讲解如何通过Simulink实现PMSM系统的建模与仿真。
一、PMSM系统的基本原理
PMSM是一种交流电机,其转子由永磁材料制成,定子绕组通过交流电产生旋转磁场。在矢量控制策略中,我们通常将定子电流分解为励磁分量和转矩分量,从而实现对电机转矩和磁通的独立控制。
PI控制器(比例-积分控制器)是控制系统中经典的控制算法,其控制律为:
$$
u(t) = Kp e(t) + Ki \int_0^t e(\tau) d\tau
$$
其中,\( Kp \) 是比例系数,\( Ki \) 是积分系数,\( e(t) \) 是控制误差。PI控制算法能够有效抑制系统的稳态误差,并具有良好的鲁棒性。
二、基于Simulink的PMSM建模
在Simulink中,我们可以从零开始搭建PMSM的模型,而不依赖于内置的PMSM模块。这不仅能够加深对电机内部工作原理的理解,还能为后续的控制算法设计提供更灵活的平台。
1. PMSM模型的搭建
PMSM的数学模型可以表示为:
定子电压方程:
$$
\begin{aligned}
vd &= Rs id + \frac{d\psid}{dt} \\
vq &= Rs iq + \frac{d\psiq}{dt} + \omegam \psid
\end{aligned}
$$
磁链方程:
$$
\begin{aligned}
基于PI控制的PMSM永磁同步电机控制系统simulink建模与仿真 1.功能介绍 基于PI控制的PMSM永磁同步电机控制系统simulink建模与仿真。 其中,基于PI(比例-积分)控制器的矢量控制策略因其简单、可靠的特点而被广泛采用。 永磁同步电机采用建模方式实现,不使用simulink的自带模型。 2.使用版本 matlab2022a 3.本作品包含内容 项目工程源文件/完整中文注释,程序操作方法视频(包含程序部分简要讲解), 仿真测试效果截图
\psid &= Ld id + \psif \\
\psiq &= Lq i_q
\end{aligned}
$$
转矩方程:
$$
Tm = \frac{3}{2} (Lq - Ld) iq \psi_f
$$
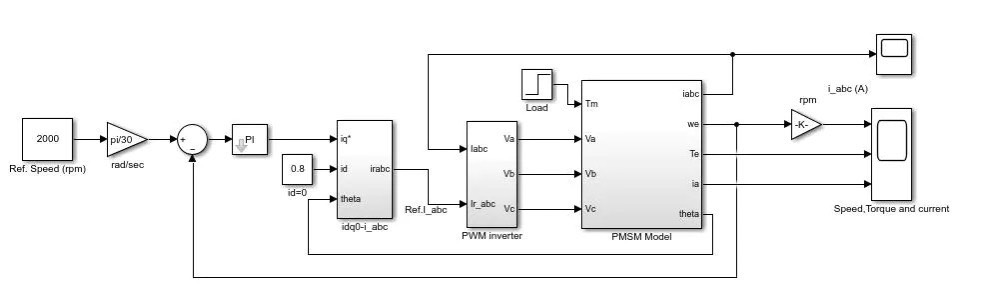
在Simulink中,我们可以使用Integrator模块模拟微分方程,通过Gain模块实现系数的乘法运算,最终搭建出如图1所示的PMSM模型。
(图1:PMSM模型结构)
2. 电机参数的设定
PMSM模型的参数对仿真结果有着重要影响。以下是一些典型的PMSM参数:
| 参数名称 | 符号 | 单位 | 默认值 |
|---|---|---|---|
| 定子电阻 | \( R_s \) | Ω | 0.1 |
| d轴电感 | \( L_d \) | H | 0.01 |
| q轴电感 | \( L_q \) | H | 0.005 |
| 转子磁通 | \( \psi_f \) | Wb | 0.1 |
这些参数可以通过查找资料或实验测量获得。在Simulink中,我们通常将这些参数存储为全局变量或通过模块参数配置。
三、PI控制器的设计与实现
PI控制器的设计是PMSM控制系统的关键部分。我们以速度控制为例,设计一个基于PI控制的速度调节器。
1. 控制器的实现
PI控制器的传递函数为:
$$
G(s) = Kp + \frac{Ki}{s}
$$
在Simulink中,PI控制器可以使用PID Controller模块实现。通过调整比例系数 \( Kp \) 和积分系数 \( Ki \),可以优化系统的动态性能和稳态精度。
2. 参数选择
PI控制器的参数选择需要根据系统的特性进行调整。例如,\( Kp \) 的大小会影响系统的响应速度,而 \( Ki \) 的大小则会影响系统的积分作用。一个常用的调整方法是基于系统的频率特性进行整定。
四、仿真与结果分析
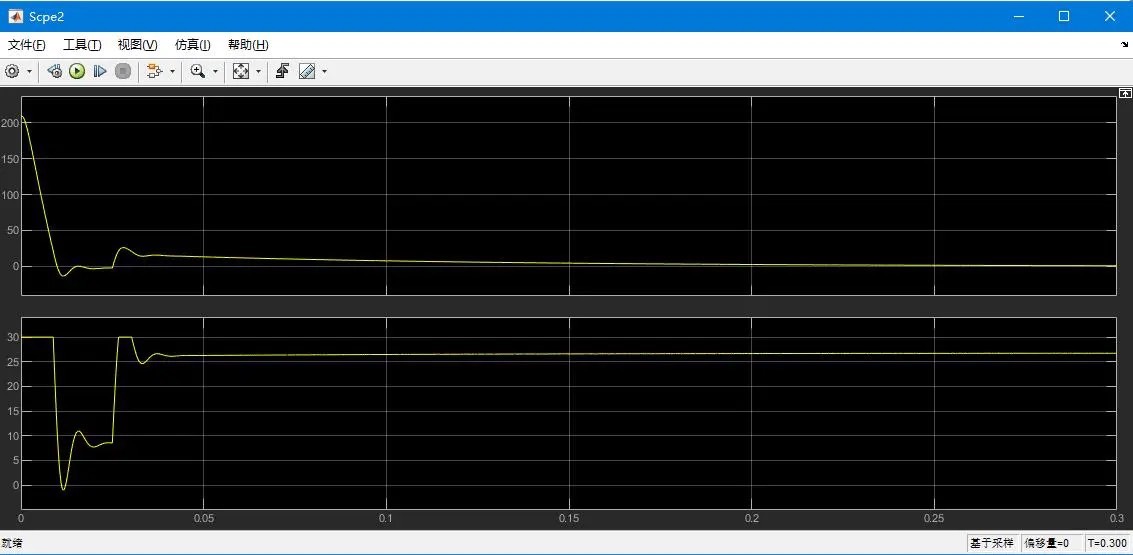
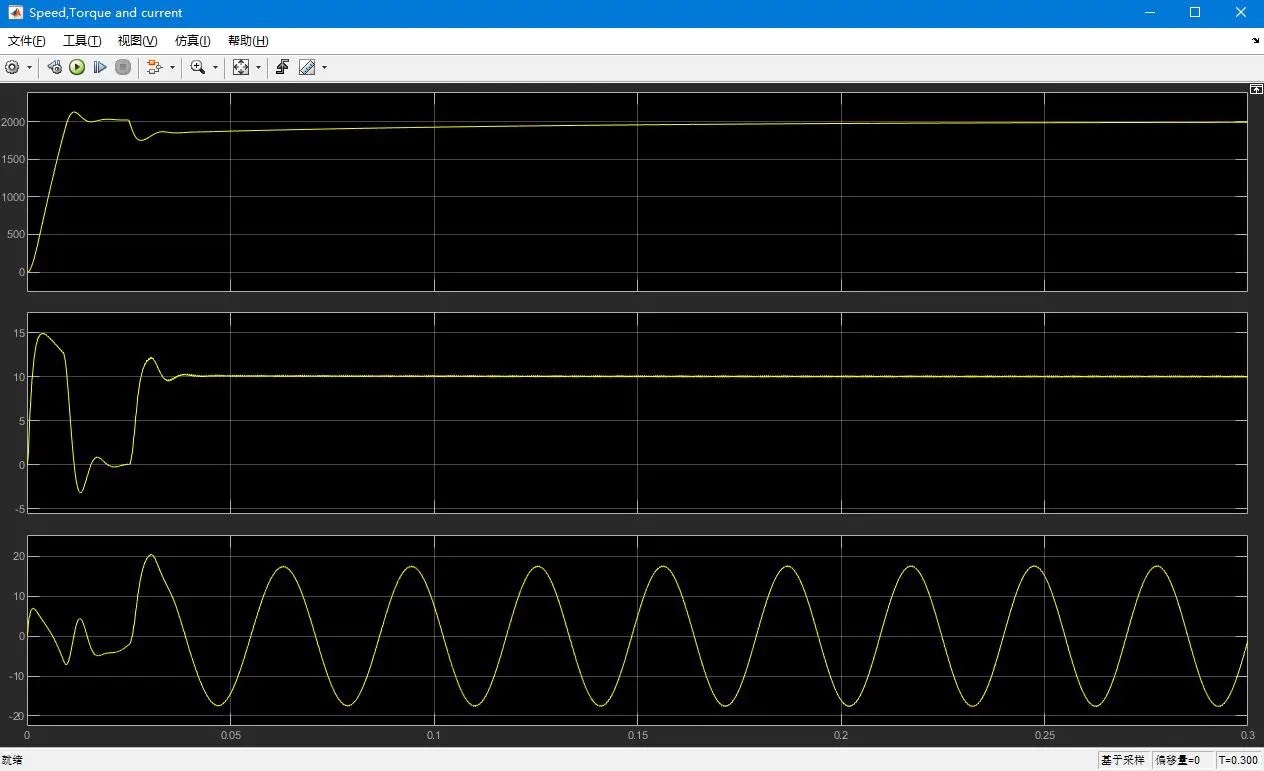
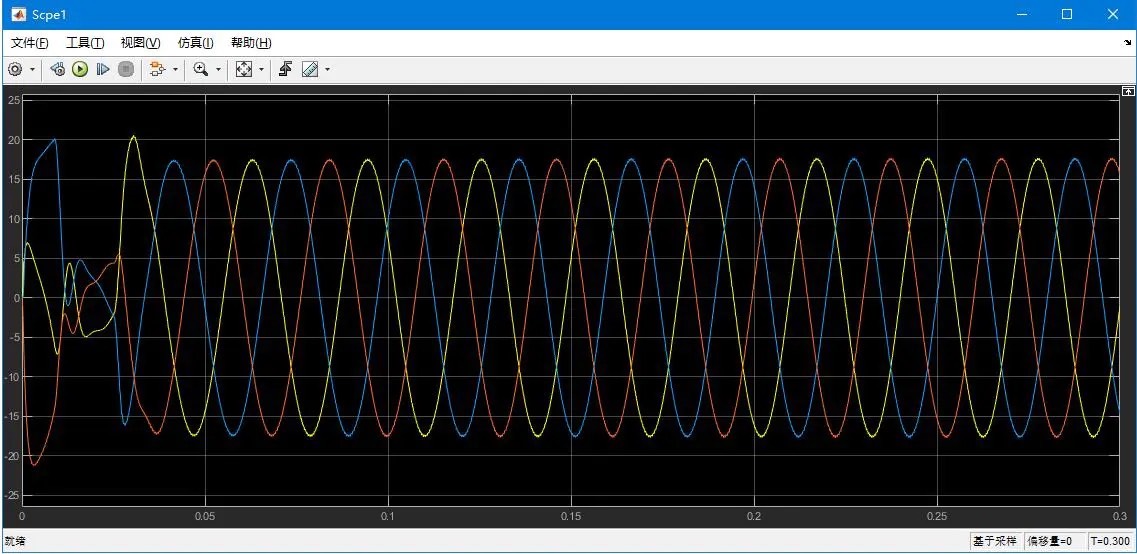
完成系统搭建后,我们可以在Simulink中配置仿真参数并运行仿真。图2展示了PMSM系统的仿真结果。
(图2:PMSM系统仿真结果)
从仿真结果可以看出,系统在0.5秒内达到了设定的转速目标(500 rad/s),转速超调较小,动态响应较快。这表明PI控制器的设计是合理的,系统具有良好的控制性能。
五、项目资源与扩展
本项目包含以下资源:
- 项目工程源文件:包含完整的Simulink模型和参数配置。
- 完整中文注释:对模型中的每个模块进行了详细说明。
- 程序操作方法视频:展示了如何运行仿真以及如何调整控制器参数。
- 仿真测试效果截图:直观展示了系统的动态和稳态性能。
这些资源可以帮助读者快速上手,同时为后续的研究和改进提供参考。
总之,通过Simulink搭建基于PI控制的PMSM控制系统是一种高效且直观的方法。希望本文能够帮助读者理解PMSM的建模与控制原理,并为后续的研究提供一定的参考价值。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 3
3 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)