四旋翼无人机轨迹跟踪PID控制仿真:让飞行更稳更准
四旋翼无人机uav轨迹跟踪PID控制仿真 包括位置三维图像,三个姿态角度图像,位置图像,以及参考位置实际位置对比图像。
说到无人机,大家可能第一时间想到的是航拍、送货或者花样飞行。而我们今天要聊的,是无人机最基础也是最重要的能力之一:轨迹跟踪。让无人机能够精准地沿着预定的路线飞行,无论是在复杂环境下完成任务,还是在表演中做出高难度动作,都需要可靠的控制算法。而在众多控制算法中,PID(比例-积分-微分)控制因其简单高效,仍是无人机控制中不可或缺的一部分。让我们一起走进无人机的控制世界,看看PID控制是如何让无人机飞行更稳更准的。
PID控制:无人机的“导航大脑”
想象一下,无人机想要实现精准飞行,必须实时感知自己的位置和姿态,同时根据设定的路径调整自己的飞行状态。这就像一个运动员在赛场上不断调整自己的动作,以保持最佳的运动状态。
PID控制的核心原理
PID控制通过三个参数(比例、积分、微分)调整控制量,从而实现对目标的稳定跟踪。具体来说:
- 比例项(P):实时纠正当前偏差,偏差越大,纠正力度越强。比例项就像运动员的即时反应。
- 积分项(I):积累历史偏差,防止系统长时间存在稳态误差。积分项就像教练员的指导,不断优化长期表现。
- 微分项(D):预估未来的偏差变化,从而实现超前控制,防止系统振荡。微分项就像是运动员对未来的预判和调整。
动力学模型:无人机的物理学基础
无人机的运动涉及位置和姿态两个层面。位置控制直接影响X、Y、Z三个轴的位置,而姿态控制则涉及俯仰角、横滚角和偏航角三个角度。PID控制在这两方面都需要发挥作用。
无人机的动力学模型可以简化为:
\[ \ddot{x} = \frac{1}{m} (F_x \sin{\phi} \cos{\theta} - m g \cos{\phi}) \]
\[ \ddot{y} = \frac{1}{m} (F_y \sin{\theta} \cos{\phi} + m g \sin{\phi}) \]
\[ \ddot{z} = \frac{1}{m} (F_z \cos{\phi} \cos{\theta} - m g) \]
其中,\( m \) 是无人机质量,\( Fx, Fy, F_z \) 是外部力,\( g \) 是重力加速度,\( \phi, \theta, \psi \) 分别是俯仰角、横滚角和偏航角。
仿真环境:构建虚拟飞行实验室
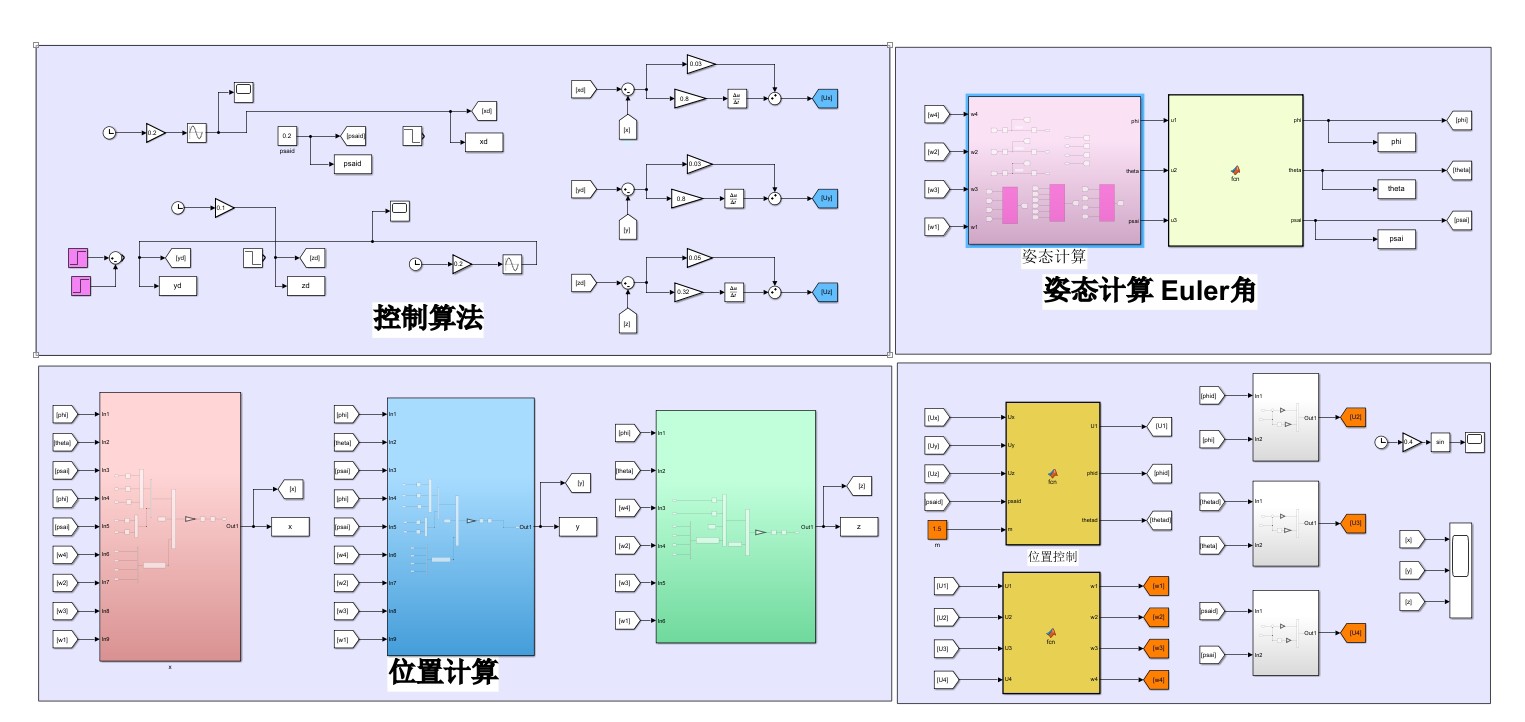
为了验证PID控制的效果,我们搭建了一个仿真实验环境,利用MATLAB实现四旋翼无人机的控制仿真。
PID参数的设置与调整
PID控制器的传递函数为:
四旋翼无人机uav轨迹跟踪PID控制仿真 包括位置三维图像,三个姿态角度图像,位置图像,以及参考位置实际位置对比图像。
\[ C(s) = Kp + \frac{Ki}{s} + K_d s \]
在实际应用中,Kp、Ki、Kd参数的设置至关重要。过大或过小的参数都会导致系统不稳定,因此需要通过反复调试和实验来确定最优参数组合。
代码实现:控制与仿真的结合
function [fx, fy, fz] = pid_controller(e_pos, e_att, Kp_pos, Ki_pos, Kd_pos, Kp_att, Ki_att, Kd_att)
% 计算位置控制输入
fx = Kp_pos(1)*e_pos(1) + Ki_pos(1)*integral_e_pos(1) + Kd_pos(1)*derivative_e_pos(1);
fy = Kp_pos(2)*e_pos(2) + Ki_pos(2)*integral_e_pos(2) + Kd_pos(2)*derivative_e_pos(2);
fz = Kp_pos(3)*e_pos(3) + Ki_pos(3)*integral_e_pos(3) + Kd_pos(3)*derivative_e_pos(3);
% 计算姿态控制输入
torque_x = Kp_att(1)*e_att(1) + Ki_att(1)*integral_e_att(1) + Kd_att(1)*derivative_e_att(1);
torque_y = Kp_att(2)*e_att(2) + Ki_att(2)*integral_e_att(2) + Kd_att(2)*derivative_e_att(2);
torque_z = Kp_att(3)*e_att(3) + Ki_att(3)*integral_e_att(3) + Kd_att(3)*derivative_e_att(3);
end在上述代码中,我们定义了一个PID控制器函数,分别处理位置和姿态偏差,计算出控制输入。需要注意的是,该函数需要维护误差的积分项和微分项,通常可以通过状态变量实现。
仿真结果:直观展现控制效果
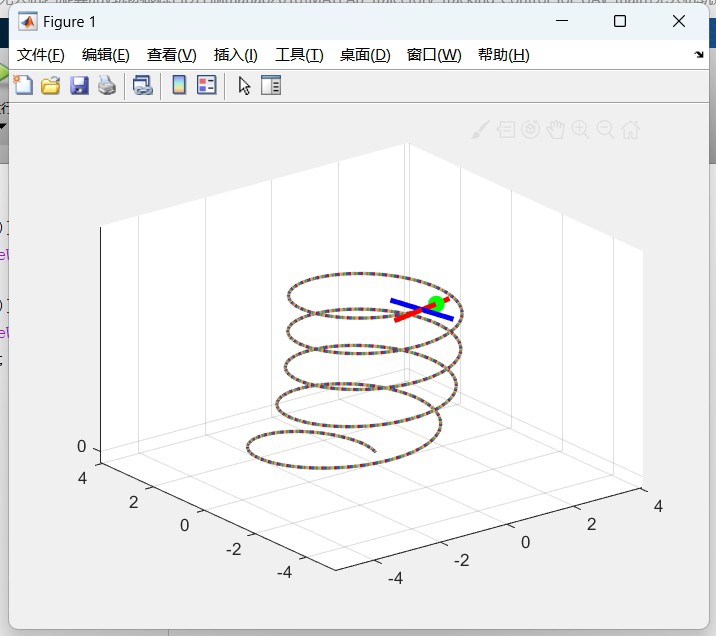
位置跟踪与三维轨迹展示
通过仿真,我们可以直观地看到无人机的位置跟踪效果。三维轨迹图展示了无人机在空间中的飞行路径,对比参考轨迹和实际轨迹,可以清晰地看到控制效果。
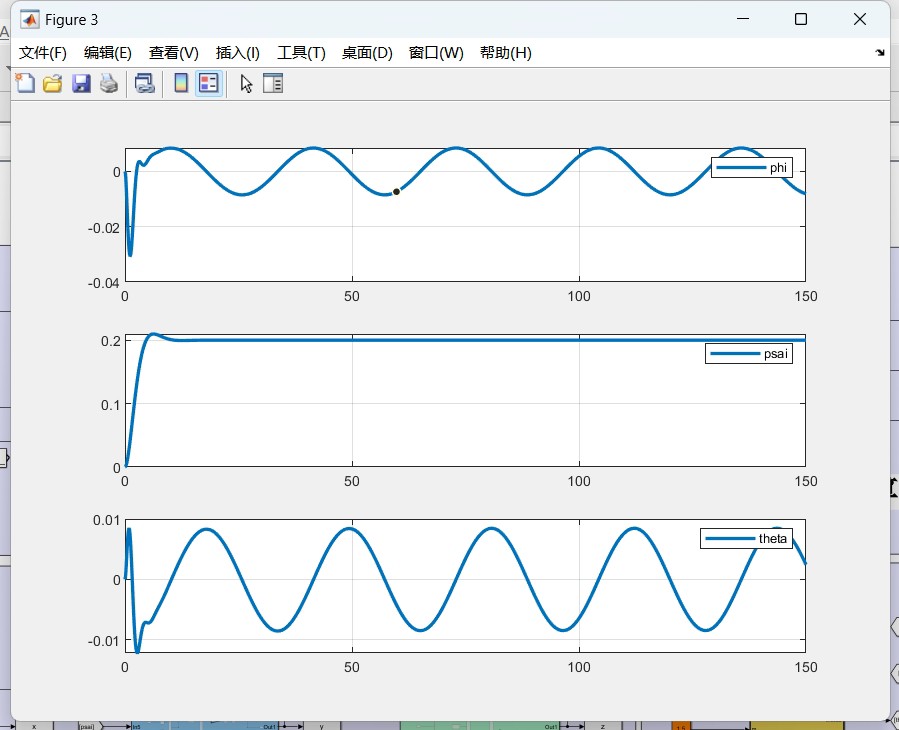
姿态控制:角度变化分析
无人机的姿态控制直接影响飞行稳定性。通过仿真,我们可以观察俯仰角、横滚角和偏航角的变化情况。
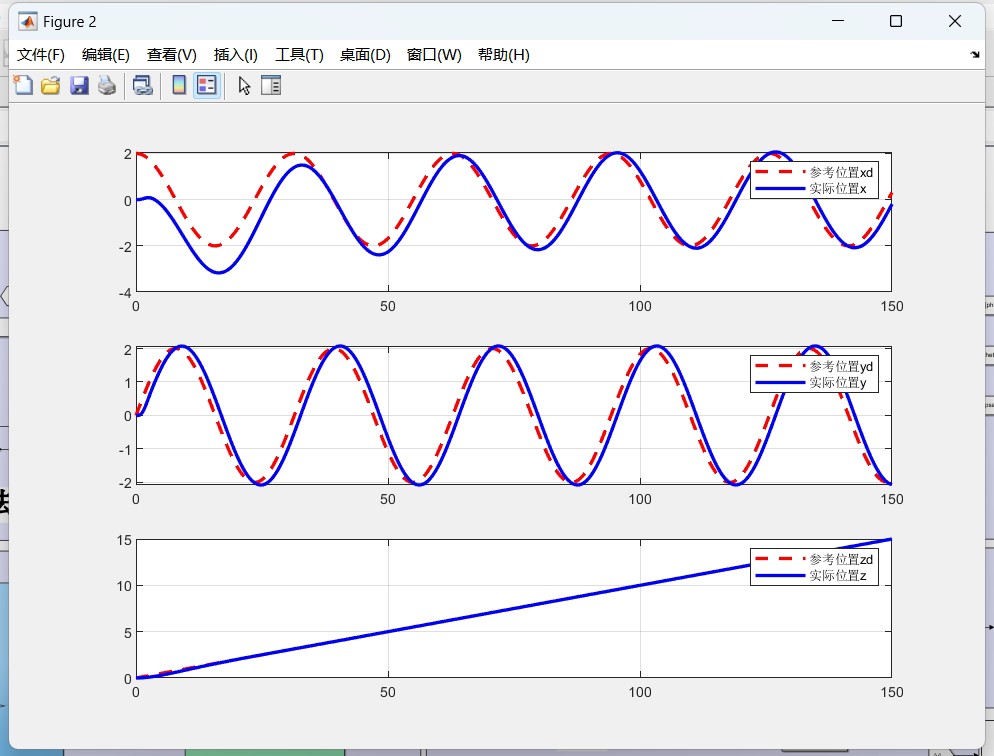
位置误差分析:控制精度的关键
位置误差图展示了无人机在飞行过程中与参考轨迹的偏差情况。误差的收敛性直接反映了PID控制的效果,理想的控制应使误差快速收敛至零。
总结与展望
通过这次仿真,我们看到了PID控制在四旋翼无人机轨迹跟踪中的高效应用。PID控制凭借其简单的结构和良好的控制效果,仍然在无人机控制中占据重要地位。然而,随着无人机任务复杂度的增加,单纯依赖PID控制可能难以应对复杂的动态环境和多目标优化问题。未来可以尝试引入改进型控制算法,如模糊PID、滑模控制或基于模型预测控制(MPC)的方法,进一步提升控制性能。
无人机的飞行控制是一门既有技术深度又充满创意的学科。每一次参数的调整,每一次算法的优化,都是让无人机更聪明、更灵活的契机。希望通过这次分享,能为无人机控制技术的爱好者提供一些启发和帮助。
如果你对无人机控制感兴趣,不妨尝试自己动手,调整PID参数,观察系统响应变化,或许你会找到属于自己的“最优控制方案”。飞行控制的世界,期待你的探索!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 2
2 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

{kind=link}
所有评论(0)