分布式驱动汽车稳定性控制的Simulink模型研究
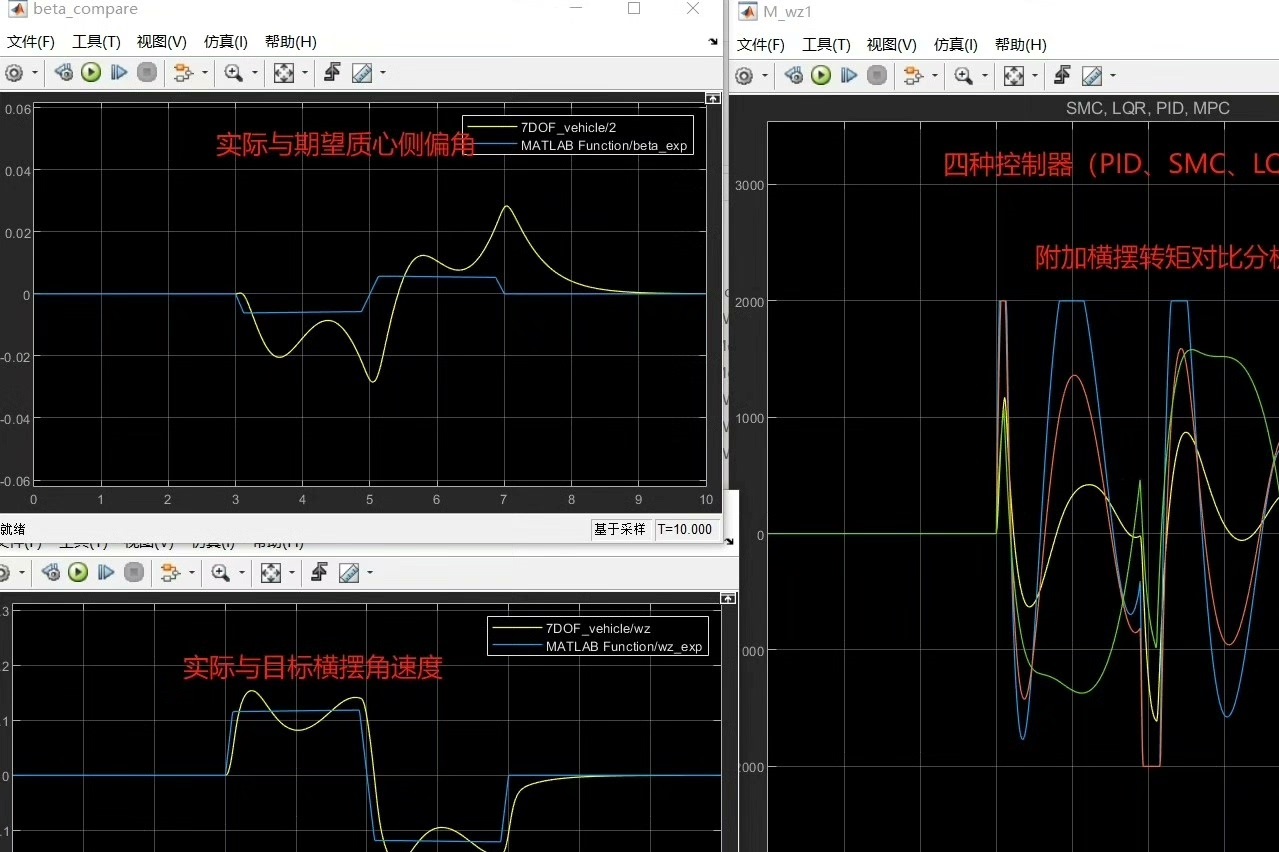
分布式驱动汽车稳定性控制。 采用纯Simulink模型搭建,包括控制策略和车辆动力学模型。 采用分层式直接横摆力矩控制,上层包括模型预测MPC,滑模控制SMC,PID控制,LQR控制。 可灵活对四种控制器对比和选择。 另外下层基于轮胎滑移率最优分配。 四种控制均可跟踪横摆角速度和质心侧偏角期望值。 车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度,二自由度模型输出理想质心侧偏角和横摆角速度。 具有初始化文件,Simulink模型,控制器说明,有参考文献和七自由度整车建模说明文档。 默认采用MATLAB2021a版本,另外提供了比较旧的2016a版本模型。
分布式驱动汽车稳定性控制这事儿,说白了就是让四个轮子各司其职还能协同作战。最近拿Simulink搭了个分层控制模型,上层用MPC、SMC、PID、LQR四个控制器搞决策,下层负责把力矩精准分配到每个轮胎。整套系统不仅能实时跟踪横摆角速度和质心侧偏角,还能随时切换对比不同控制策略——这可比实验室里焊电路板改参数痛快多了。
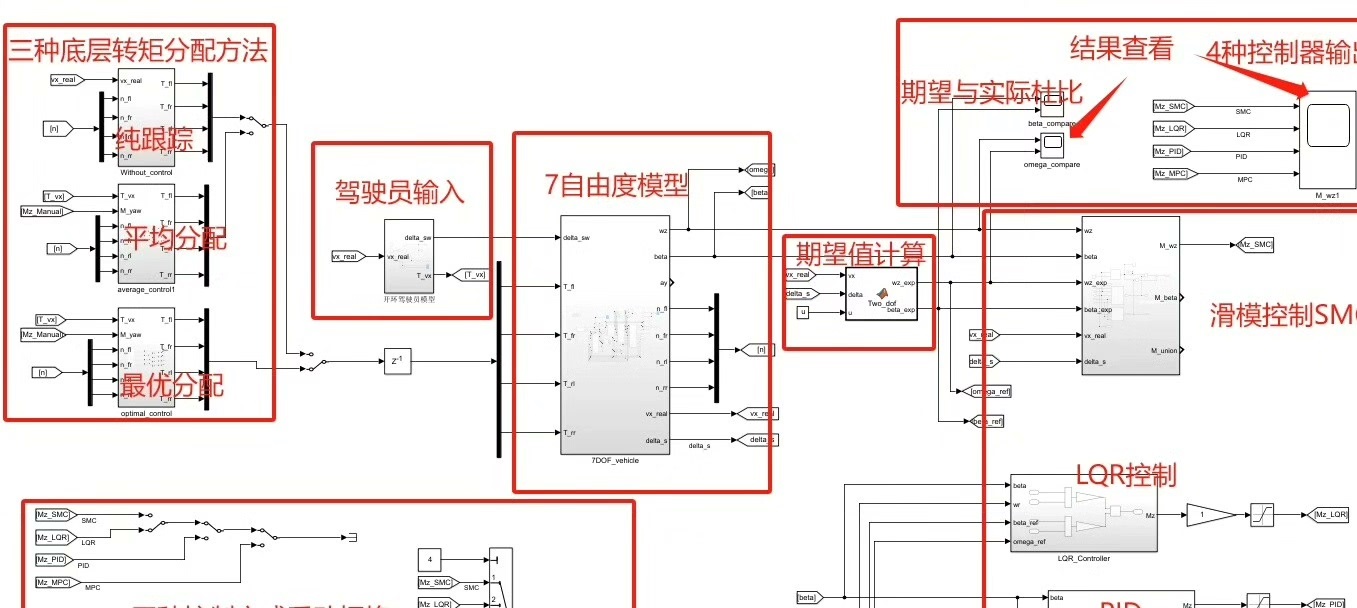
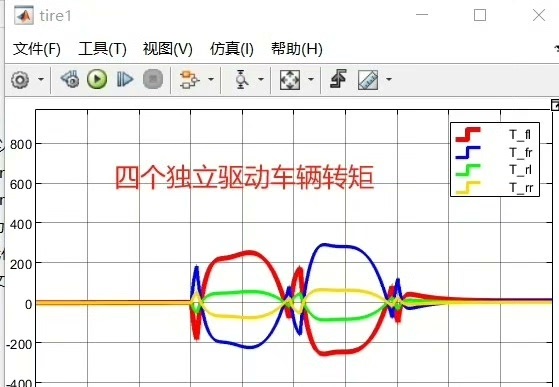
咱们先看模型架构。七自由度整车模型可不是吃素的,纵向/横向/横摆运动加上四个轮子旋转自由度,光状态方程就写满两页A4纸。但核心逻辑其实特直白:把上层算出来的总横摆力矩,按轮胎滑移率最优原则分配给各轮。这里头有个骚操作——用QP(二次规划)解分配问题,Matlab里quadprog函数直接搞定:
function [Fx_opt] = torque_distribution(H, f, Aeq, beq)
options = optimoptions('quadprog','Display','off');
Fx_opt = quadprog(H, f, [], [], Aeq, beq, [], [], [], options);
end这段代码的关键在于权重矩阵H的设计,得考虑轮胎载荷和附着系数,不然分配完可能某个轮子直接打滑失控。
上层控制器的切换才是重头戏。在Simulink里用Mask封装了四个控制器模块,想用哪个直接勾选。比如SMC(滑模控制)的趋近律设计:
s = beta_error + k_beta * dbeta_error; // 滑模面
delta_Mz = K_sat * sat(s / Phi); // 带边界层的饱和函数这里Phi参数调不好就容易抖振,实测从0.1改到0.5能让控制量平滑不少。而MPC的预测时域设置最玄学,设短了跟车反应似的迟钝,设长了计算量爆炸。后来发现预测步长取0.3秒,控制步长0.05秒是个甜点。
分布式驱动汽车稳定性控制。 采用纯Simulink模型搭建,包括控制策略和车辆动力学模型。 采用分层式直接横摆力矩控制,上层包括模型预测MPC,滑模控制SMC,PID控制,LQR控制。 可灵活对四种控制器对比和选择。 另外下层基于轮胎滑移率最优分配。 四种控制均可跟踪横摆角速度和质心侧偏角期望值。 车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度,二自由度模型输出理想质心侧偏角和横摆角速度。 具有初始化文件,Simulink模型,控制器说明,有参考文献和七自由度整车建模说明文档。 默认采用MATLAB2021a版本,另外提供了比较旧的2016a版本模型。
模型初始化脚本里有宝藏——预设了冰面、湿沥青、干地三种路面参数。跑仿真时直接load Road_ice.mat,立马能看到各控制器在低附着力路面的表现差异。有意思的是LQR在这种工况下反而比MPC稳,因为权重矩阵Q对侧偏角惩罚设得狠。

版本兼容这事坑过不少人。2016a用户打开模型会报错,主要是新版本Bus信号自动命名功能作妖。解决办法是在初始化时手动指定信号名称:
busElements(1) = Simulink.BusElement;
busElements(1).Name = 'YawRate_actual';
busElements(1).DataType = 'double';七自由度模型文档里藏了个彩蛋——作者把轮胎魔术公式的参数来源标注成了某轮胎厂家的内部代号,懂行的能直接对应到具体产品型号。搞控制的人都知道,轮胎特性摸不准,仿真结果就是空中楼阁。
最后说个实战技巧:跑对比仿真时别傻傻地逐个改参数,用Simulink的Batch模式批量运行。把四种控制器的配置写成结构体数组,配合parfor并行计算,原本两小时的仿真20分钟搞定。这招尤其在调MPC的权重参数时救命,毕竟谁也不想盯着进度条到凌晨三点。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 3
3 0
0- 0



 已为社区贡献31条内容
已为社区贡献31条内容

所有评论(0)