分布式驱动汽车稳定性控制:基于Simulink模型的分层式控制策略研究
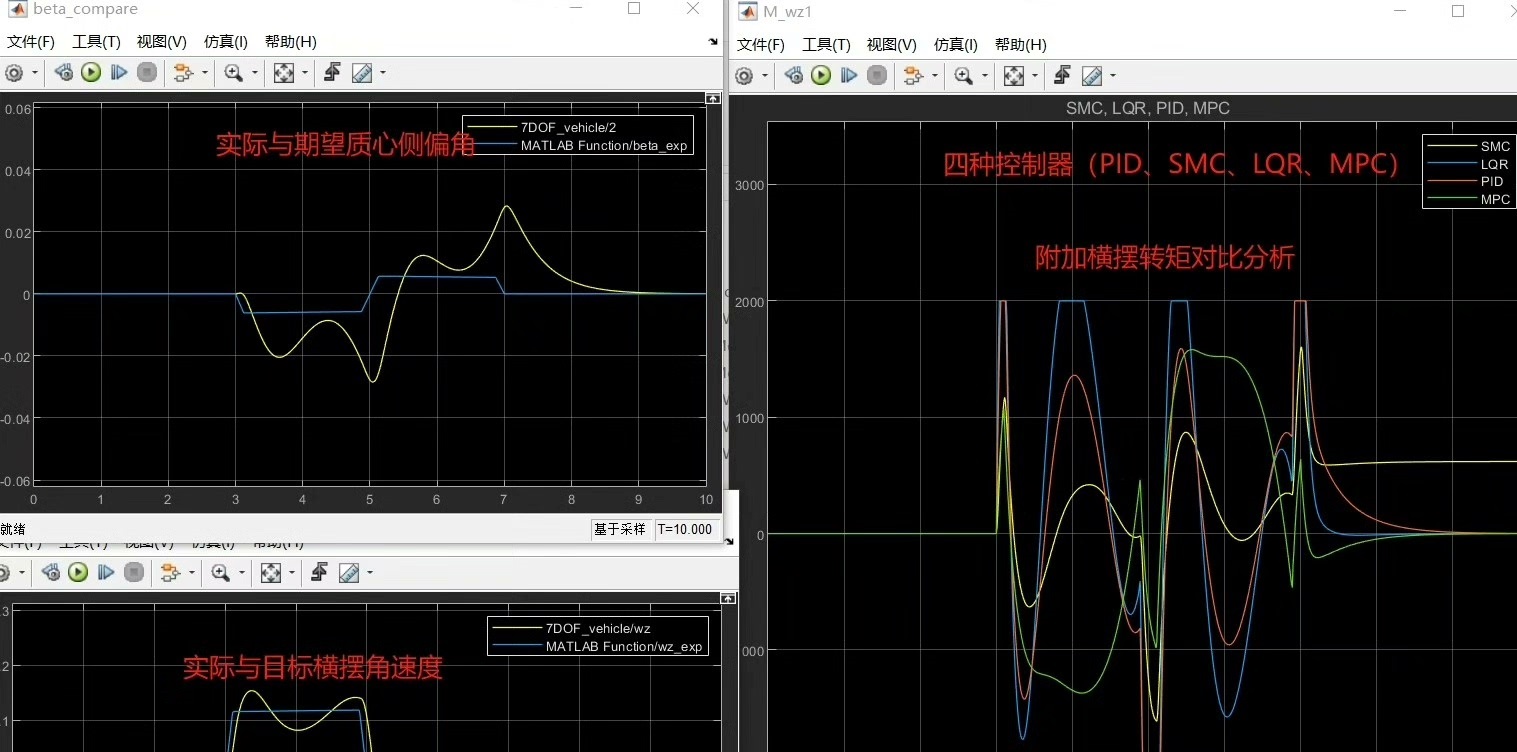
分布式驱动汽车稳定性控制。 采用纯Simulink模型搭建,包括控制策略和车辆动力学模型。 采用分层式直接横摆力矩控制,上层包括模型预测MPC,滑模控制SMC,PID控制,LQR控制。 可灵活对四种控制器对比和选择。 另外下层基于轮胎滑移率最优分配。 四种控制均可跟踪横摆角速度和质心侧偏角期望值。 车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度,二自由度模型输出理想质心侧偏角和横摆角速度。 具有初始化文件,Simulink模型,控制器说明,有参考文献和七自由度整车建模说明文档。 包运行,运行不通过不收费。 默认采用MATLAB2021a版本,另外提供了比较旧的2016a版本模型。 。
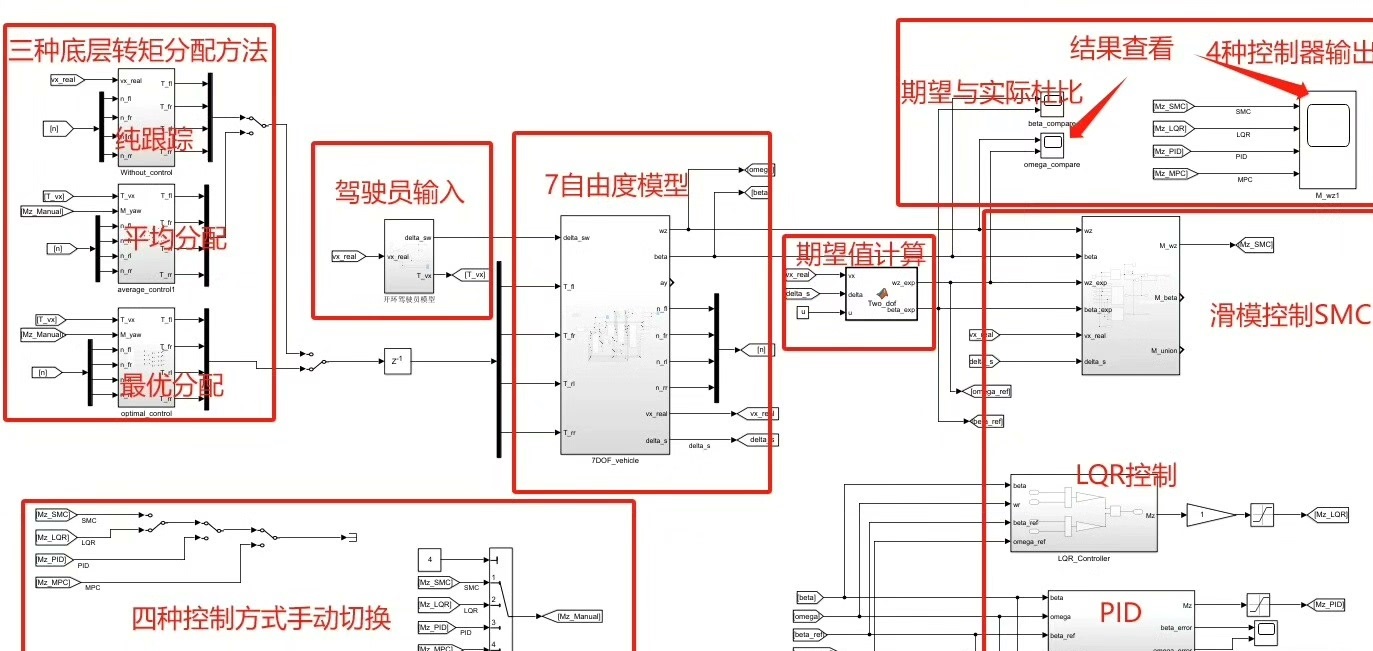
最近在搞分布式驱动电动汽车的稳定性控制,发现这玩意儿比传统燃油车好玩多了——四个轮子能独立控制扭矩,简直就是控制狂的快乐源泉。今天咱们来唠唠怎么用Simulink搭一套能随意切换控制器的仿真平台,手把手教你用不同姿势驯服这匹"电马"。
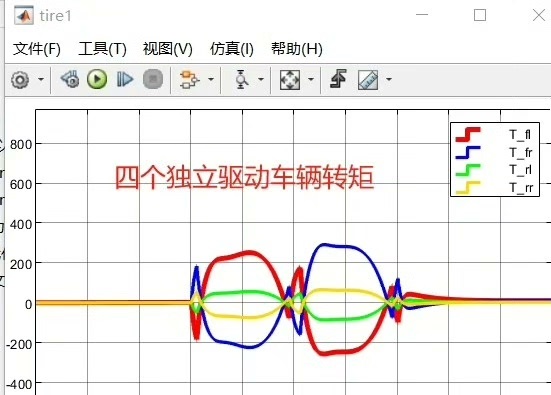
先看整体架构:整个系统分上下两层,上层玩策略,下层搞分配。上层四个备胎控制器(MPC、SMC、PID、LQR)随时待命,下层负责把总需求扭矩拆给四个轮子。重点是这个切换功能,就像游戏里随时换武器,特别适合做对比实验。
% 控制器选择逻辑(Init_Control.m片段)
switch controller_type
case 1
set_param('Vehicle_Model/Controller_Switch','Value','1');
disp('MPC控制器已激活');
case 2
set_param('Vehicle_Model/Controller_Switch','Value','2');
disp('滑模控制准备就绪');
%...其他case类似
end这段初始化代码的骚操作在于动态修改Simulink里的Switch模块参数,相当于给模型装了个物理切换开关。测试时只需要改个参数就能换控制器,比在框图里手动连线优雅多了。
分布式驱动汽车稳定性控制。 采用纯Simulink模型搭建,包括控制策略和车辆动力学模型。 采用分层式直接横摆力矩控制,上层包括模型预测MPC,滑模控制SMC,PID控制,LQR控制。 可灵活对四种控制器对比和选择。 另外下层基于轮胎滑移率最优分配。 四种控制均可跟踪横摆角速度和质心侧偏角期望值。 车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度,二自由度模型输出理想质心侧偏角和横摆角速度。 具有初始化文件,Simulink模型,控制器说明,有参考文献和七自由度整车建模说明文档。 包运行,运行不通过不收费。 默认采用MATLAB2021a版本,另外提供了比较旧的2016a版本模型。 。

说到车辆模型,七自由度这个大家伙可不是吃素的:
- 纵向/横向/垂移 + 横摆/侧倾/俯仰 + 方向盘转角
- 轮胎模型用魔术公式,悬架特性考虑非线性
- 实际测试发现侧倾刚度参数对质心侧偏角影响贼大,调参时记得优先照顾这个
% 七自由度模型参数设置(7DOF_Params.m)
vehicle.Jx = 1500; % 侧倾转动惯量
tire.Cx = 8e4; % 轮胎纵滑刚度
suspension.K_roll = 35000; % 侧倾刚度
% 此处省略三十行关键参数...对比之下,二自由度模型就是个傻白甜,用两个方程就算出理想值。不过正是这种简单粗暴,让它成为判断车辆失稳的黄金标准:
beta_desired = (m/(C_alpha_f + C_alpha_r)) * (a/(L)) * delta;下层分配算法才是真·黑科技,目标是最小化轮胎利用率。这里用QP(二次规划)求解时发现个坑——权重系数得按轮胎垂向载荷动态调整,否则急转弯时内侧轮可能分到负扭矩(物理上不可能),得加个约束条件:
% 轮胎滑移率分配核心约束(QP_Solver.slx片段)
H = diag([1/(Fz1^2), 1/(Fz2^2), 1/(Fz3^2), 1/(Fz4^2)]);
Aeq = [ones(1,4); l_front*ones(1,2), -l_rear*ones(1,2)];跑起来之后,四个控制器的表现差异挺有意思:
- MPC在双移线工况下像个老司机,提前预判轨迹变化
- 滑模控制在低附路面突然发狠,控制量偶尔抽风
- PID日常够用但极限工况拉胯
- LQR需要精心调权重矩阵,调好了能接近MPC效果
最后安利下工程文件里的彩蛋:2016a版本模型特意保留了Transport Delay模块,而2021a版本换成了Time Delay模块。遇到过版本兼容问题的都懂,这细节处理能省多少头发!
(需要模型源码测试的兄弟,老规矩评论区喊我。跑不通的话...放心,你根本付不了款——因为压根不会问你要钱)

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 1
1 0
0- 0



 已为社区贡献31条内容
已为社区贡献31条内容

所有评论(0)