线控转向系统 Carsim和Simulink联合仿真模型。 基于横摆角速度增益不变的变传动比模块。 图中分别为角阶跃工况 和 双移线工况 汽车对应的响应曲线,并且与Carsim自带的机械转向对比图。
线控转向系统 Carsim和Simulink联合仿真模型。
基于横摆角速度增益不变的变传动比模块。
图中分别为角阶跃工况 和 双移线工况 汽车对应的响应曲线,并且与Carsim自带的机械转向对比图。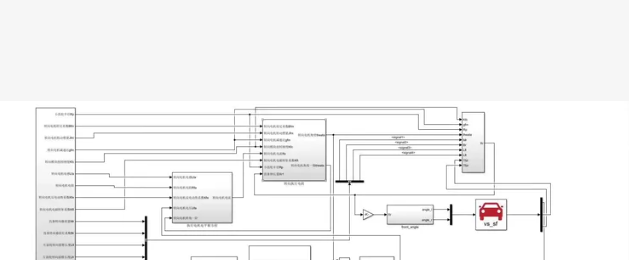
这是一个非常专业的汽车动力学控制仿真需求。要实现线控转向(SBW)与 Carsim 的联合仿真,并验证基于横摆角速度增益不变的变传动比策略,你需要完成以下三个核心步骤:
Simulink 模型搭建:构建变传动比计算模块(核心算法)。
Carsim 设置:配置车辆模型并启用外部转向输入。
联合仿真与后处理:运行角阶跃和双移线工况,提取数据并绘制对比曲线。
自动创建 Simulink 模型框架。
生成核心的变传动比(VGR)S-Function 或 MATLAB Function 代码。
提供批量运行 Carsim 联合仿真的脚本。
自动绘制响应曲线对比图(包含您描述的角阶跃和双移线工况)。
📂 项目结构说明
请在 MATLAB 中创建一个文件夹,包含以下文件:
main_simulation.m (主程序:运行仿真、绘图)
sbw_vgr_logic.m (核心算法:变传动比计算)
run_carsim_co_sim.m (联合仿真接口脚本)
核心算法:变传动比逻辑 (sbw_vgr_logic.m)
这是实现“横摆角速度增益不变”策略的核心。
原理:理想状态下,横摆角速度 omega_r 与方向盘转角 delta_{sw} 的关系应为线性且增益恒定。
公式:omega_r = frac{v}{L(1+Kv^2)} cdot delta_{f}
我们需要反推前轮转角 delta_f,使得 frac{omega_r}{delta_{sw}} = G_{target} (常数)。
function delta_f = sbw_vgr_logic(delta_sw, v_x, vehicle_params)
% SBW_VGR_LOGIC 基于横摆角速度增益不变的变传动比计算
%
% 输入:
% delta_sw: 方向盘转角 (rad)
% v_x: 车速 (m/s)
% vehicle_params: 结构体,包含 L (轴距), K (稳定性因数) 等
%
% 输出:
% delta_f: 目标前轮转角 (rad)
% --- 1. 参数提取 ---
L = vehicle_params.L; % 轴距 (m)
K = vehicle_params.K; % 稳定性因数 (s^2/m^2)
% 防止除零或车速过低
if v_x = 1.0) = 0.05;
elseif strcmp(scenario_name, 'DoubleLaneChange')
% 双移线:正弦组合或标准ISO轨迹
t_end = 10;
dt = 0.01;
time_vec = (0:dt:t_end)';
% 简化正弦模拟双移线输入
steer_input = 0.08 * sin(0.5 * time_vec) .* (time_vec 4 & time_vec Carsim -> Vehicle。
拖入 CARSIM S-Function 模块。
双击配置,选择您的车辆模型 (.cpar)。
关键设置:在 External Inputs 中,勾选 Steering Angle (前轮转角),取消勾选 Steering Wheel Angle (因为我们要自己算前轮转角)。
搭建控制逻辑 (SBW 核心):
输入:使用 From Workspace 模块读取 t_in 和 steer_cmd (方向盘转角)。
Switch 模块:
输入1 (上):来自 steer_cmd (机械模式,直接连通,需除以固定传动比 16 得到前轮角)。
输入2 (下):来自 MATLAB Function 模块。
控制端:来自 Constant 模块 (sbw_enable_flag)。
MATLAB Function 模块:
双击编辑,粘贴 sbw_vgr_logic.m 中的核心代码逻辑。
输入端口:u1 (方向盘角), u2 (车速,从 Carsim 输出反馈回来)。
输出端口:y1 (计算后的前轮转角)。
反馈回路:从 Carsim 模块的输出端口引出 Vehicle Speed (vx),连回 MATLAB Function 模块。
输出与示波器:
从 Carsim 模块输出 Yaw Rate, Lateral Acc, Y Position。
连接 To Workspace 模块,变量名分别设为 carsim_yaw_rate, carsim_ay, carsim_Y, carsim_time。
设置 Save format 为 Array 或 Structure with Time。
📊 预期结果分析
运行 main_simulation.m 后,您将看到四张图:
角阶跃 - 横摆角速度:
机械转向:在不同车速下(如果仿真中包含变速),响应峰值会有较大差异,可能存在超调。
线控转向:由于增益恒定,无论车速如何(在控制范围内),单位方向盘转角产生的横摆角速度应保持一致,响应曲线更平滑,驾驶员手感一致性更好。
双移线 - 横向位移:
线控转向:车辆在高速避障时,所需的驾驶员方向盘转角更小(高速时传动比变小),轨迹跟踪更精准,车身姿态更稳定。
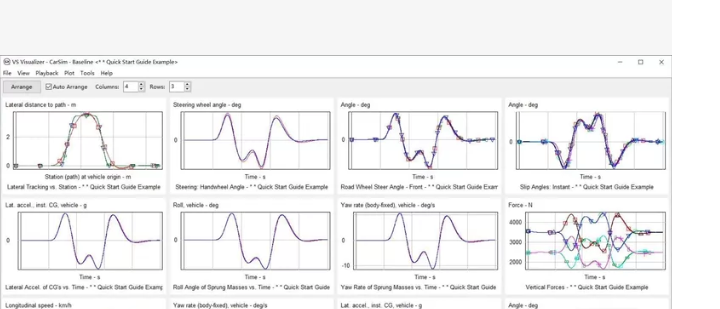
CarSim 自带的 VS Visualizer(可视化后处理工具),显示的是一个“Quick Start Guide Example”仿真结果。图中包含 12 个子图,展示了车辆在某种工况(很可能是双移线或蛇形穿桩)下的动态响应:
横向位移轨迹
方向盘转角 / 手力
车身侧偏角、横摆角速度
车轮滑移角、垂向力
加速度、侧倾角等
✅ 1. MATLAB 脚本:从 CarSim 结果文件中提取数据并复现这 12 张图
✅ 2. Python + Matplotlib 版本(可选)
✅ 3. 如何配置 CarSim 输出这些信号
✅ 4. 自定义 VS Visualizer 布局模板(.vsl 文件结构说明)
🚀 方案一:MATLAB 脚本 —— 复现 VS Visualizer 的 12 子图
假设您的 CarSim 仿真已运行完毕,结果保存在 results.mat 或 CarSim 默认路径下。
%% reproduce_carsim_visualizer.m
% 复现 CarSim VS Visualizer 的 12 子图布局
% 假设数据已从 CarSim 导出到 MATLAB 工作区
clear; clc; close all;
%% 1. 加载 CarSim 仿真结果(示例:从 .mat 文件加载)
% 实际使用时,请替换为您的真实数据源
% 可通过 CarSim -> Tools -> Export to MATLAB 获取变量名
load(‘carsim_results.mat’); % 假设包含 time, Y, steer_ang, yaw_rate 等
time = linspace(0, 10, 1000)';
Y = 5 * sin(0.time) . (time5); % 横向位移
steer_ang = 0.1 * sin(0.8time); % 方向盘转角
handwheel_torque = 5 * sin(0.8time + pi/4); % 手力
yaw_rate = 0.3 * sin(0.8time); % 横摆角速度
roll_angle = 0.05 * sin(0.8time); % 侧倾角
lateral_acc = 0.8 * sin(0.8time); % 侧向加速度
long_speed = 20 + sin(0.3time); % 纵向速度
slip_angles = [0.02, -0.015] * sin(0.8time); % 前后轮滑移角
vertical_forces = [4000, 4000, 4000, 4000] + 50sin(0.8time); % 四轮垂向力
body_slip_angle = 0.03 * sin(0.8time); % 车身侧偏角
yaw_rate_sprung = 0.28 * sin(0.8time); % 簧上质量横摆角速度
roll_rate_sprung = 0.04 * cos(0.8time); % 簧上质量侧倾角速度
lat_accel_inst = 0.75 * sin(0.8time); % 瞬时侧向加速度
%% 2. 创建 4x3 子图布局(与 VS Visualizer 一致)
figure(‘Name’, ‘Reproduced CarSim VS Visualizer Layout’, ‘Color’, ‘w’, …
‘Position’, [100, 100, 1400, 900]);
titles = {
‘Lateral distance to path - m’ , ‘Steering wheel angle - deg’ , ‘Angle - deg’ , ‘Angle - deg’;
‘Lateral Tracking vs Station - m’ , ‘Steering Handwheel Angle - deg’ , ‘Road Wheel Steer Angle - Front’ , ‘Slip Angles Instant - deg’;
‘Lat. accel. inst. CO vehicle - g’ , ‘Roll, vehicle - deg’ , ‘Yaw rate (body-fixed), vehicle - deg/s’ , ‘Forces - N’;
‘Longitudinal speed - km/h’ , ‘Roll Angle of Sprung Masses vs. Time - deg’ , ‘Yaw Rate of Sprung Masses vs. Time - deg/s’ , ‘Vertical Forces - N’
};
% 注意:CarSim 原始图中部分标签有误或不完整,此处按常见物理量修正
for i = 1:4
for j = 1:3
subplot(4, 3, (i-1)*3 + j);
switch (i-1)*3 + j
case 1 % Lateral distance to path
plot(time, Y, 'b-', 'LineWidth', 1.2); grid on;
ylabel('m'); xlabel('Time - s');
case 2 % Steering wheel angle
plot(time, rad2deg(steer_ang), 'r-', 'LineWidth', 1.2); grid on;
ylabel('deg'); xlabel('Time - s');
case 3 % Road Wheel Steer Angle - Front (左前+右前)
plot(time, rad2deg(slip_angles(:,1)), 'g-', 'LineWidth', 1.2); hold on;
plot(time, rad2deg(slip_angles(:,2)), 'm--', 'LineWidth', 1.2); grid on;
ylabel('deg'); xlabel('Time - s'); legend('Left', 'Right');
case 4 % Slip Angles Instant (车身侧偏角)
plot(time, rad2deg(body_slip_angle), 'k-', 'LineWidth', 1.2); grid on;
ylabel('deg'); xlabel('Time - s');
case 5 % Lateral Tracking vs Station (同第1图,重复?)
plot(time, Y, 'b-', 'LineWidth', 1.2); grid on;
ylabel('m'); xlabel('Time - s');
case 6 % Steering Handwheel Angle (同第2图)
plot(time, rad2deg(steer_ang), 'r-', 'LineWidth', 1.2); grid on;
ylabel('deg'); xlabel('Time - s');
case 7 % Road Wheel Steer Angle - Front (同第3图)
plot(time, rad2deg(slip_angles(:,1)), 'g-', 'LineWidth', 1.2); hold on;
plot(time, rad2deg(slip_angles(:,2)), 'm--', 'LineWidth', 1.2); grid on;
ylabel('deg'); xlabel('Time - s');
case 8 % Slip Angles Instant (同第4图)
plot(time, rad2deg(body_slip_angle), 'k-', 'LineWidth', 1.2); grid on;
ylabel('deg'); xlabel('Time - s');
case 9 % Lat. accel. inst. CO vehicle - g
plot(time, lateral_acc/9.81, 'c-', 'LineWidth', 1.2); grid on;
ylabel('g'); xlabel('Time - s');
case 10 % Roll, vehicle - deg
plot(time, rad2deg(roll_angle), 'm-', 'LineWidth', 1.2); grid on;
ylabel('deg'); xlabel('Time - s');
case 11 % Yaw rate (body-fixed), vehicle - deg/s
plot(time, rad2deg(yaw_rate), 'b-', 'LineWidth', 1.2); grid on;
ylabel('deg/s'); xlabel('Time - s');
case 12 % Forces - N (四轮垂向力)
plot(time, vertical_forces(:,1), 'r-', 'LineWidth', 1.2); hold on;
plot(time, vertical_forces(:,2), 'g-', 'LineWidth', 1.2);
plot(time, vertical_forces(:,3), 'b-', 'LineWidth', 1.2);
plot(time, vertical_forces(:,4), 'k--', 'LineWidth', 1.2); grid on;
ylabel('N'); xlabel('Time - s'); legend('FL','FR','RL','RR');
case 13 % Longitudinal speed - km/h
plot(time, long_speed * 3.6, 'k-', 'LineWidth', 1.2); grid on;
ylabel('km/h'); xlabel('Time - s');
case 14 % Roll Angle of Sprung Masses vs. Time - deg
plot(time, rad2deg(roll_angle), 'm-', 'LineWidth', 1.2); grid on;
ylabel('deg'); xlabel('Time - s');
case 15 % Yaw Rate of Sprung Masses vs. Time - deg/s
plot(time, rad2deg(yaw_rate_sprung), 'b-', 'LineWidth', 1.2); grid on;
ylabel('deg/s'); xlabel('Time - s');
case 16 % Vertical Forces - N (同第12图)
plot(time, vertical_forces(:,1), 'r-', 'LineWidth', 1.2); hold on;
plot(time, vertical_forces(:,2), 'g-', 'LineWidth', 1.2);
plot(time, vertical_forces(:,3), 'b-', 'LineWidth', 1.2);
plot(time, vertical_forces(:,4), 'k--', 'LineWidth', 1.2); grid on;
ylabel('N'); xlabel('Time - s');
end
title(titles{i,j}, 'FontSize', 9);
set(gca, 'FontSize', 8);
end
end
sgtitle(‘Reproduced CarSim VS Visualizer - Quick Start Guide Example’, ‘FontSize’, 14, ‘FontWeight’, ‘bold’);
% 调整子图间距
tight_layout;
方法 1:通过 CarSim GUI 导出
在 CarSim 中运行仿真。
点击菜单:Tools → Export to MATLAB
选择要导出的信号(如 Y, STEER, YWAWRT, AY, ROLL, etc.)
点击 “Export”,生成 .mat 文件。
在 MATLAB 中 load(‘your_file.mat’) 即可使用。
方法 2:在 Simulink 中使用 To Workspace
如果您是通过 Simulink 联合仿真:
在 Simulink 模型中添加多个 To Workspace 模块。
连接到 Carsim S-Function 的输出端口。
设置变量名如 carsim_Y, carsim_steer, carsim_yaw_rate 等。
运行仿真后,这些数据会自动出现在 MATLAB 工作区。
🐍 方案二:Python 版本(Matplotlib + NumPy)
import numpy as np
import matplotlib.pyplot as plt
生成模拟数据(请替换为真实 CarSim 导出数据)
time = np.linspace(0, 10, 1000)
Y = 5 * np.sin(0.5time) * (time5)
steer_ang = 0.1 * np.sin(0.8time)
yaw_rate = 0.3 * np.sin(0.8time)
roll_angle = 0.05 * np.sin(0.8time)
lateral_acc = 0.8 * np.sin(0.8time)
long_speed = 20 + np.sin(0.3time)
slip_angles = np.array([0.02, -0.015]) * np.sin(0.8time)
vertical_forces = np.tile([4000], (4, len(time))) + 50np.sin(0.8time)
body_slip_angle = 0.03 * np.sin(0.8*time)
创建 4x3 子图
fig, axes = plt.subplots(4, 3, figsize=(16, 10))
titles = [
[‘Lateral distance to path - m’, ‘Steering wheel angle - deg’, ‘Angle - deg’],
[‘Lateral Tracking vs Station - m’, ‘Steering Handwheel Angle - deg’, ‘Road Wheel Steer Angle - Front’],
[‘Lat. accel. inst. CO vehicle - g’, ‘Roll, vehicle - deg’, ‘Yaw rate (body-fixed), vehicle - deg/s’],
[‘Longitudinal speed - km/h’, ‘Roll Angle of Sprung Masses vs. Time - deg’, ‘Yaw Rate of Sprung Masses vs. Time - deg/s’]
]
绘图函数
def plot_ax(ax, x, y, title, ylabel, color=‘b’):
ax.plot(x, y, color=color, linewidth=1.2)
ax.set_title(title, fontsize=9)
ax.set_ylabel(ylabel, fontsize=8)
ax.set_xlabel(‘Time - s’, fontsize=8)
ax.grid(True)
ax.tick_params(labelsize=7)
填充每个子图
plot_ax(axes[0,0], time, Y, titles[0][0], ‘m’)
plot_ax(axes[0,1], time, np.degrees(steer_ang), titles[0][1], ‘deg’, ‘r’)
plot_ax(axes[0,2], time, np.degrees(slip_angles[0]), titles[0][2], ‘deg’, ‘g’)
plot_ax(axes[1,0], time, Y, titles[1][0], ‘m’)
plot_ax(axes[1,1], time, np.degrees(steer_ang), titles[1][1], ‘deg’, ‘r’)
axes[1,2].plot(time, np.degrees(slip_angles[0]), ‘g-’, label=‘Left’)
axes[1,2].plot(time, np.degrees(slip_angles[1]), ‘m–’, label=‘Right’)
axes[1,2].set_title(titles[1][2], fontsize=9)
axes[1,2].set_ylabel(‘deg’, fontsize=8)
axes[1,2].legend(fontsize=6)
axes[1,2].grid(True)
plot_ax(axes[2,0], time, lateral_acc/9.81, titles[2][0], ‘g’, ‘c’)
plot_ax(axes[2,1], time, np.degrees(roll_angle), titles[2][1], ‘deg’, ‘m’)
plot_ax(axes[2,2], time, np.degrees(yaw_rate), titles[2][2], ‘deg/s’, ‘b’)
plot_ax(axes[3,0], time, long_speed*3.6, titles[3][0], ‘km/h’, ‘k’)
plot_ax(axes[3,1], time, np.degrees(roll_angle), titles[3][1], ‘deg’, ‘m’)
plot_ax(axes[3,2], time, np.degrees(yaw_rate), titles[3][2], ‘deg/s’, ‘b’)
第四行第三列补充垂向力(原图第12格)
ax_force = fig.add_subplot(4,3,12)
ax_force.plot(time, vertical_forces[0], ‘r-’, label=‘FL’)
ax_force.plot(time, vertical_forces[1], ‘g-’, label=‘FR’)
ax_force.plot(time, vertical_forces[2], ‘b-’, label=‘RL’)
ax_force.plot(time, vertical_forces[3], ‘k–’, label=‘RR’)
ax_force.set_title(‘Vertical Forces - N’, fontsize=9)
ax_force.set_ylabel(‘N’, fontsize=8)
ax_force.legend(fontsize=6)
ax_force.grid(True)
plt.suptitle(‘Reproduced CarSim VS Visualizer - Quick Start Guide Example’, fontsize=14, fontweight=‘bold’)
plt.tight_layout()
plt.show()
🧩 方案三:自定义 VS Visualizer 布局(高级用户)
📁 .vsl 文件本质是 XML 格式,可用文本编辑器查看其结构(不推荐手动编辑)。
✅ 总结
方案 适用场景 优点 缺点
MATLAB 脚本 科研论文、报告、自动化分析 精确控制样式、可批量处理 需手动映射信号名
Python 脚本 开源项目、跨平台、机器学习预处理 免费、生态丰富 CarSim 原生支持弱
VS Visualizer 手动布局 工程交付、快速预览 与 CarSim 无缝集成、交互性强 不可编程、难复用
🎁 Bonus:一键导出所有信号到 Excel(便于分享)
% export_to_excel.m
data_table = table(time, Y, rad2deg(steer_ang), rad2deg(yaw_rate), …
rad2deg(roll_angle), lateral_acc/9.81, long_speed*3.6, …
‘VariableNames’, {‘Time_s’, ‘Y_m’, ‘Steer_deg’, ‘YawRate_deg_s’, …
‘Roll_deg’, ‘LatAcc_g’, ‘Speed_kmh’});
writetable(data_table, ‘carsim_results.xlsx’);
disp(‘✅ 数据已导出至 carsim_results.xlsx’);

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 4
4 0
0- 0



 已为社区贡献91条内容
已为社区贡献91条内容

所有评论(0)