探索分布式四轮独立驱动汽车稳定性控制
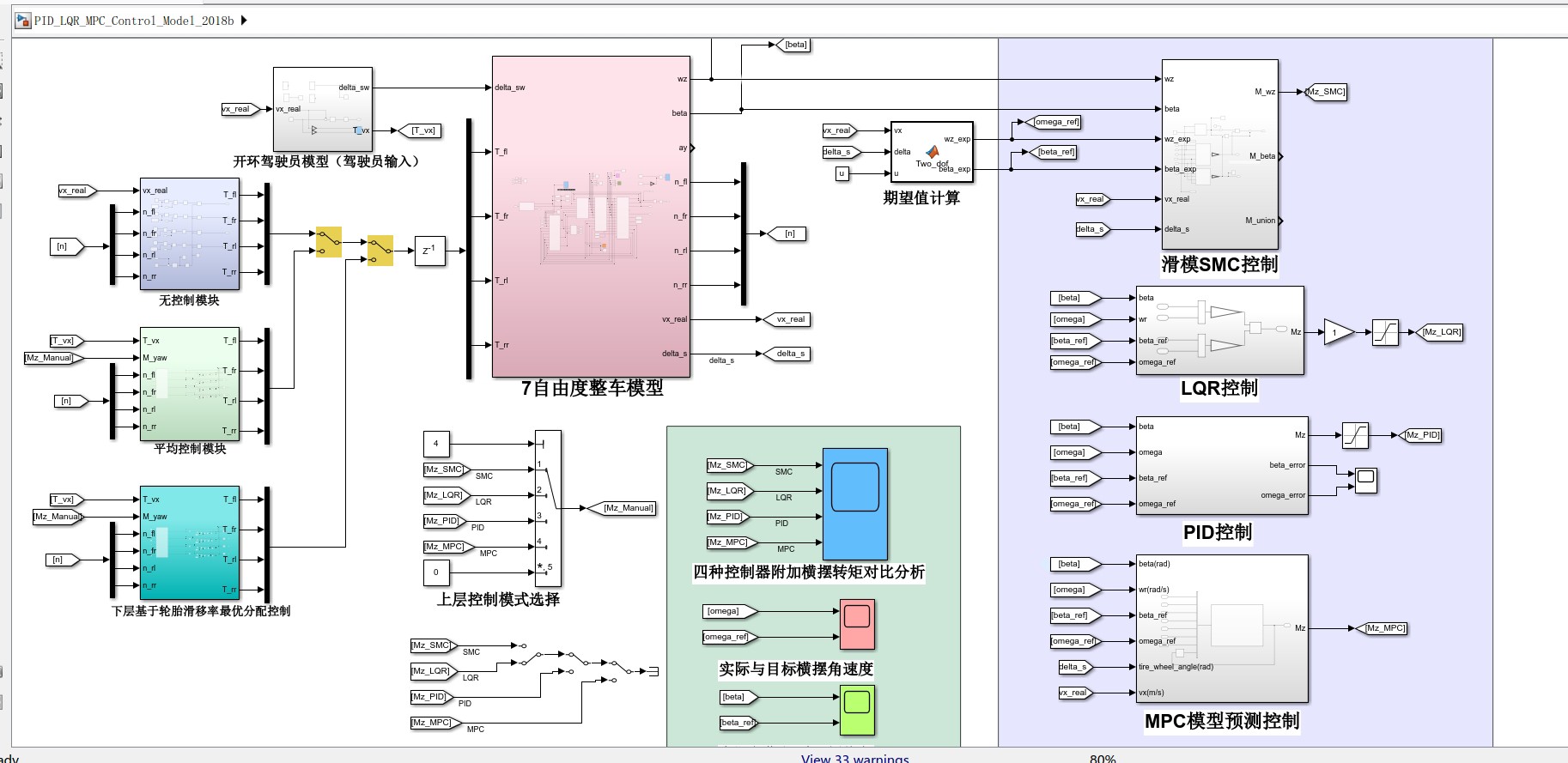
分布式四轮独立驱动汽车稳定性控制(说明文档+参考文献+仿真模型) (1)控制策略:采用分层式直接横摆力矩控制 ①上层:包括模型预测MPC,滑模控制SMC,PID控制,LQR控制,可灵活对四种控制器对比和选择 ②下层:基于轮胎滑移率最优分配。 四种控制均可跟踪横摆角速度和质心侧偏角期望值。 (2)车辆动力学模型 ①七自由度整车模型:车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度, ②二自由度模型:输出理想质心侧偏角和横摆角速度。 资料内容: 1.纯simulink仿真模型(2018b版本) 2.4份Word说明文档(七自由度建模、MPC模型预测、控制策略、矢量控制设计) 3.附参考文献 4.初始化m文件
在汽车领域,分布式四轮独立驱动汽车的稳定性控制是一个热门且关键的研究方向。今天就来和大家详细唠唠基于分层式直接横摆力矩控制的分布式四轮独立驱动汽车稳定性控制,还会涉及到相关的车辆动力学模型,以及给大家展示下配套的仿真模型等资料。
控制策略 - 分层式直接横摆力矩控制
上层控制 - 多样选择
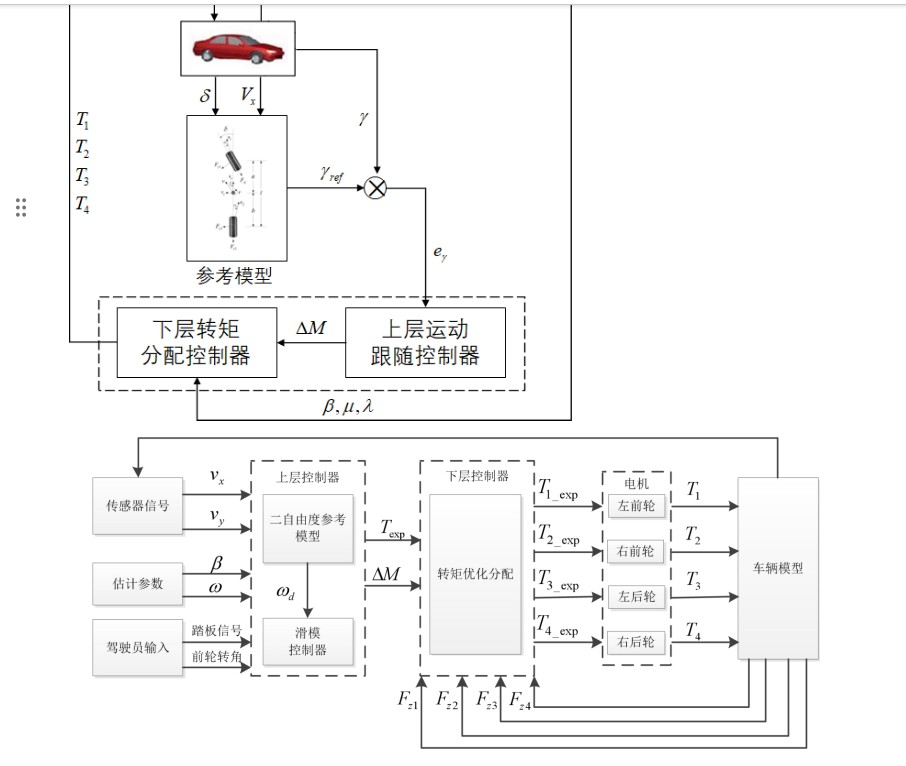
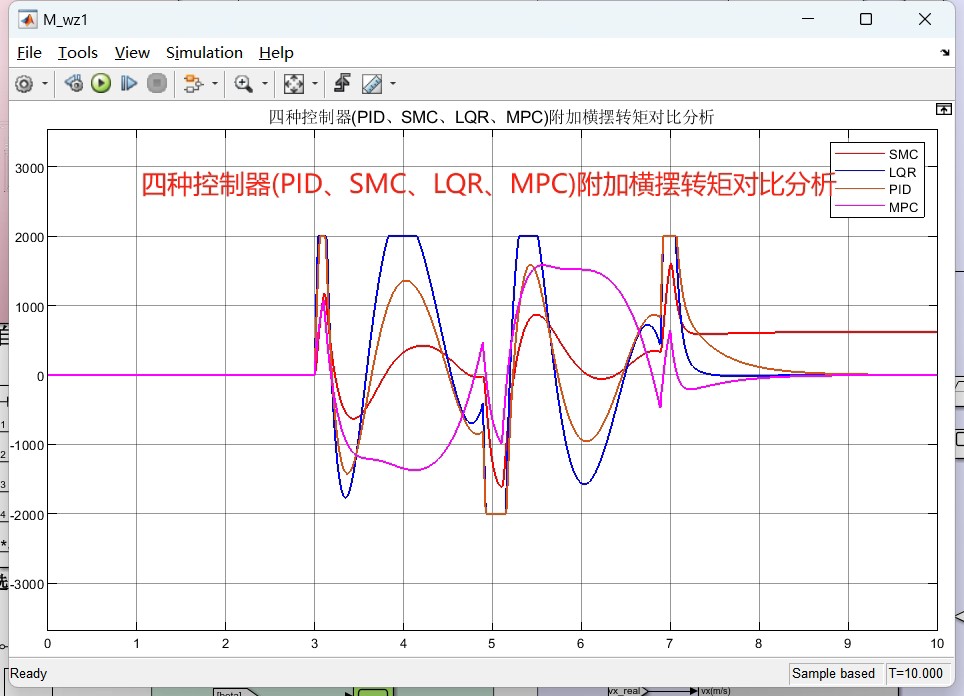
分层式直接横摆力矩控制的上层部分提供了多种控制算法供选择,包括模型预测MPC、滑模控制SMC、PID控制以及LQR控制 。这就像是给工程师们一个“百宝箱”,可以根据实际需求灵活对这四种控制器进行对比和挑选。
分布式四轮独立驱动汽车稳定性控制(说明文档+参考文献+仿真模型) (1)控制策略:采用分层式直接横摆力矩控制 ①上层:包括模型预测MPC,滑模控制SMC,PID控制,LQR控制,可灵活对四种控制器对比和选择 ②下层:基于轮胎滑移率最优分配。 四种控制均可跟踪横摆角速度和质心侧偏角期望值。 (2)车辆动力学模型 ①七自由度整车模型:车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度, ②二自由度模型:输出理想质心侧偏角和横摆角速度。 资料内容: 1.纯simulink仿真模型(2018b版本) 2.4份Word说明文档(七自由度建模、MPC模型预测、控制策略、矢量控制设计) 3.附参考文献 4.初始化m文件
比如说PID控制,它是一种经典且应用广泛的控制算法。代码示例如下:
% 简单的PID控制代码示例
Kp = 1; % 比例系数
Ki = 0.1; % 积分系数
Kd = 0.01; % 微分系数
error = desired_value - current_value;
integral = integral + error * dt;
derivative = (error - previous_error) / dt;
control_signal = Kp * error + Ki * integral + Kd * derivative;
previous_error = error;在这个代码片段里,通过调整Kp、Ki、Kd三个系数,就可以调节控制系统对误差的响应方式。比例项Kp根据当前误差大小直接做出反应,积分项Ki累积过往误差以消除稳态误差,微分项Kd则对误差的变化率做出响应,提前预测系统的变化趋势。
MPC(模型预测控制)则是基于模型预测系统未来的行为,并根据预测结果在线优化控制输入。它考虑了系统的动态模型以及约束条件,能实现更优的控制性能。虽然其原理相对复杂,但在应对复杂工况时优势明显。
下层控制 - 轮胎滑移率最优分配
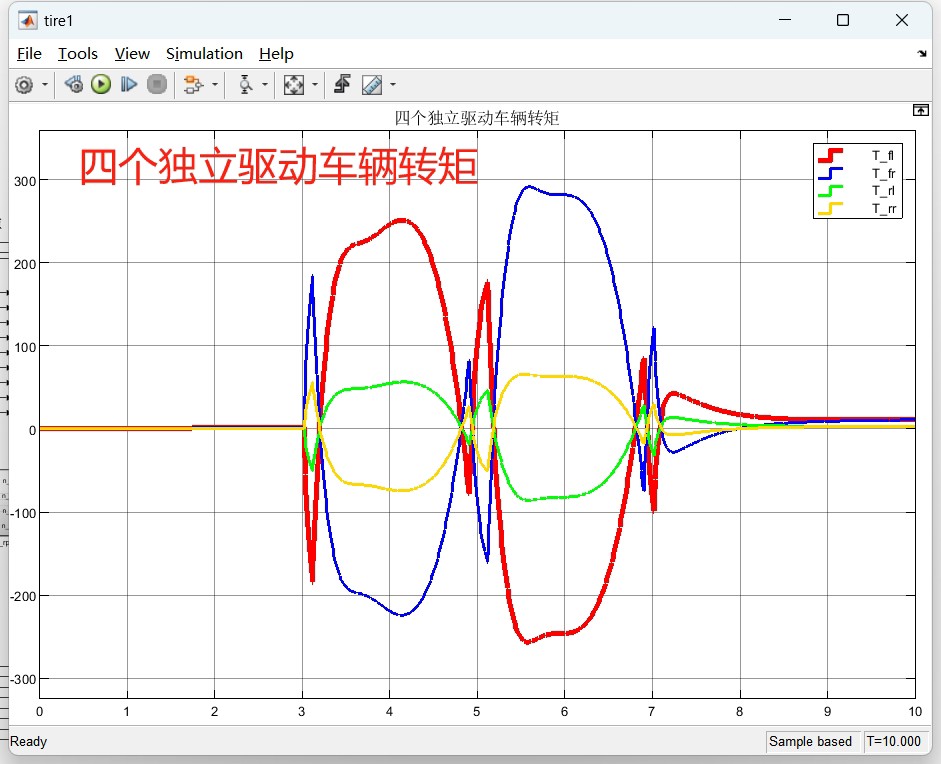
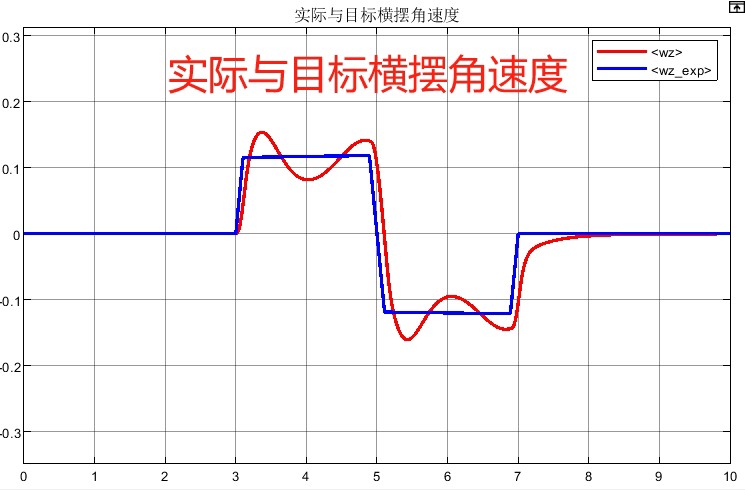
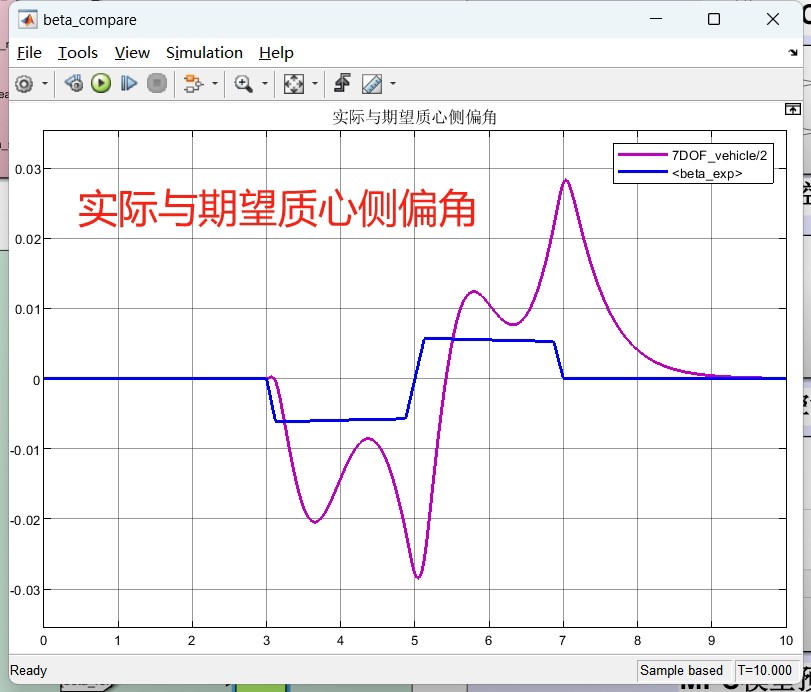
下层控制基于轮胎滑移率最优分配。不管是上层选择的哪种控制算法,最终目的都是要精确跟踪横摆角速度和质心侧偏角期望值。这就好比是各个“将领”(上层控制算法)制定战略,“士兵”(下层轮胎滑移率最优分配)负责具体执行,确保车辆的稳定性。
车辆动力学模型
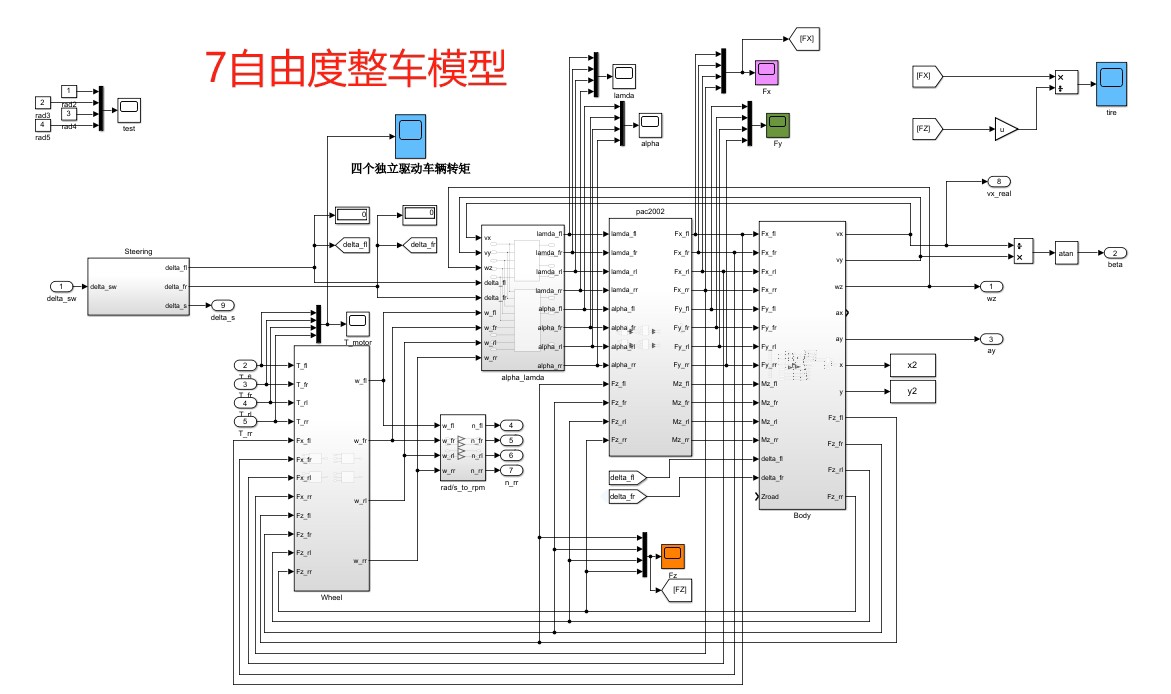
七自由度整车模型
车辆被控对象采用七自由度整车模型,这个模型输出实际质心侧偏角和横摆角速度。它更全面地考虑了车辆在行驶过程中的各种运动状态,能更真实地模拟车辆的实际情况。想象一下,车辆在高速行驶、转弯、躲避障碍物等各种复杂场景下,七自由度整车模型就像一个精密的“模拟器”,尽可能还原车辆的实际响应。
二自由度模型
与之相对的是二自由度模型,它输出理想质心侧偏角和横摆角速度。二自由度模型相对简单,计算量小,但是抓住了车辆运动的主要特征,在一些对实时性要求较高,对精度要求不是极高的场景下也有其用武之地。
丰富资料助力研究
这次的分布式四轮独立驱动汽车稳定性控制研究,配套资料非常丰富。
- 纯simulink仿真模型(2018b版本):Simulink为我们搭建了一个可视化的仿真平台,可以直观地观察控制算法在车辆动力学模型上的运行效果。通过调整模型参数、控制算法参数等,快速验证不同方案的可行性。
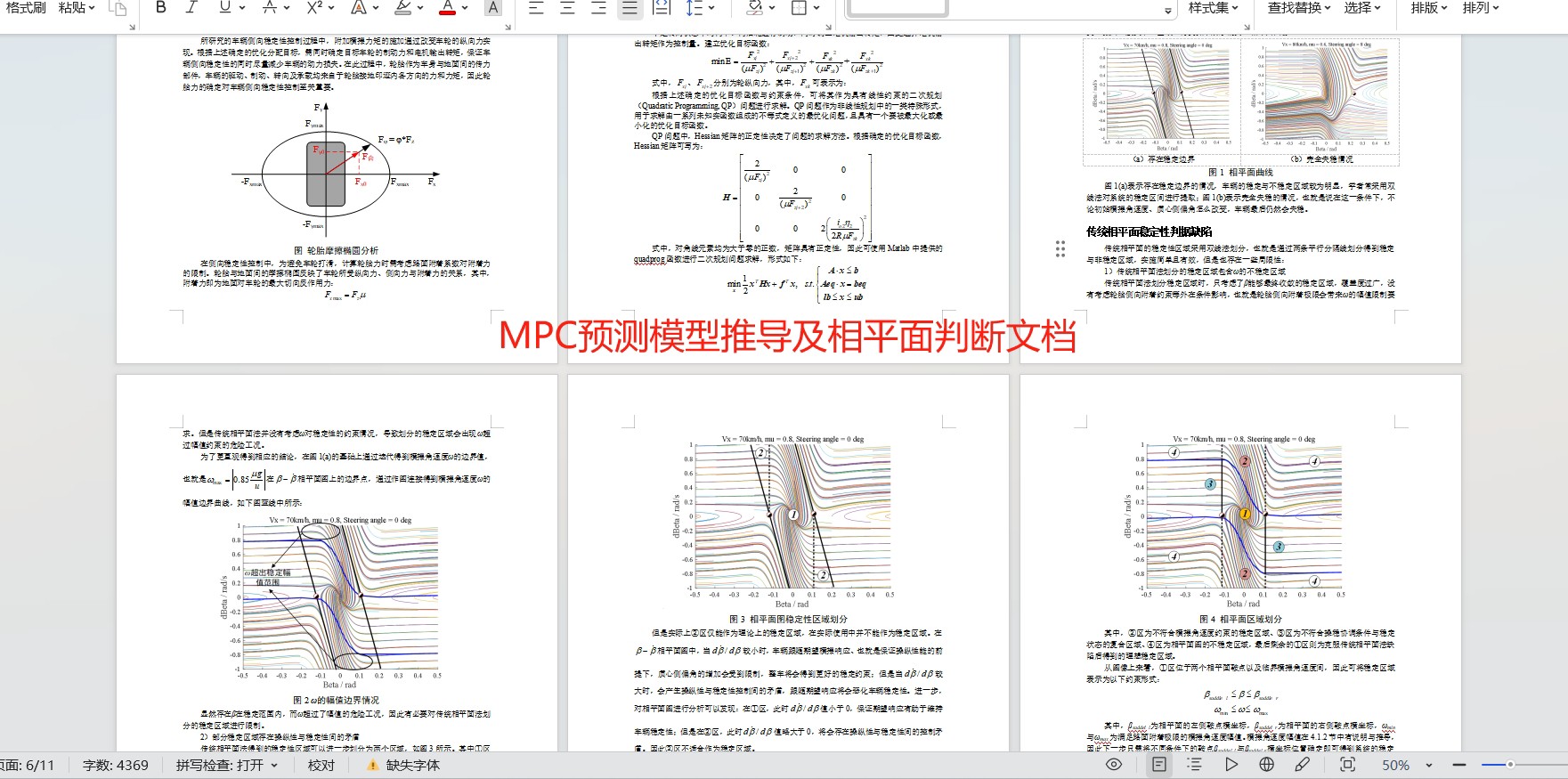
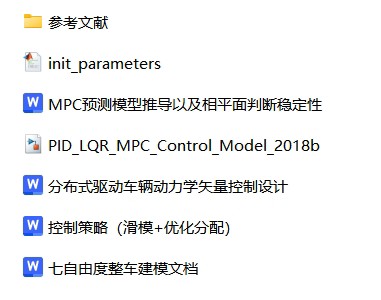
- 4份Word说明文档:涵盖了七自由度建模、MPC模型预测、控制策略、矢量控制设计等内容。这些文档就像“说明书”,详细地讲解了整个研究的理论基础、设计思路以及实现方法,帮助我们更好地理解和复用这些成果。
- 附参考文献:参考文献就像是一座知识的“桥梁”,链接到前人在这个领域的研究成果。通过阅读参考文献,可以了解到这个研究方向的发展脉络,站在巨人的肩膀上进一步探索。
- 初始化m文件:初始化m文件为整个仿真和研究提供了初始设置,确保各个模型和算法在一个已知的、可重复的初始状态下运行,方便我们进行对比和分析。
总的来说,分布式四轮独立驱动汽车稳定性控制涉及到精妙的控制策略以及不同复杂度的车辆动力学模型,而丰富的资料则为我们深入研究这个领域提供了有力的支持。希望今天的分享能让大家对这个方向有更清晰的认识,也期待大家在这个充满挑战与机遇的领域里有更多的探索和发现。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 9
9 0
0- 0



 已为社区贡献61条内容
已为社区贡献61条内容

所有评论(0)