光伏交直流混合微电网离网(孤岛)模式双下垂控制Matlab/Simulink仿真探究
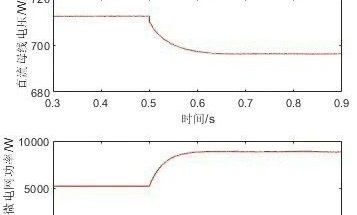
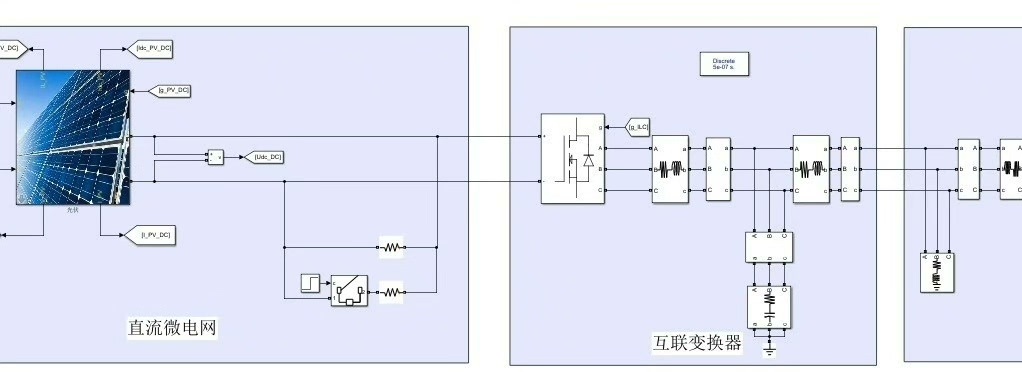
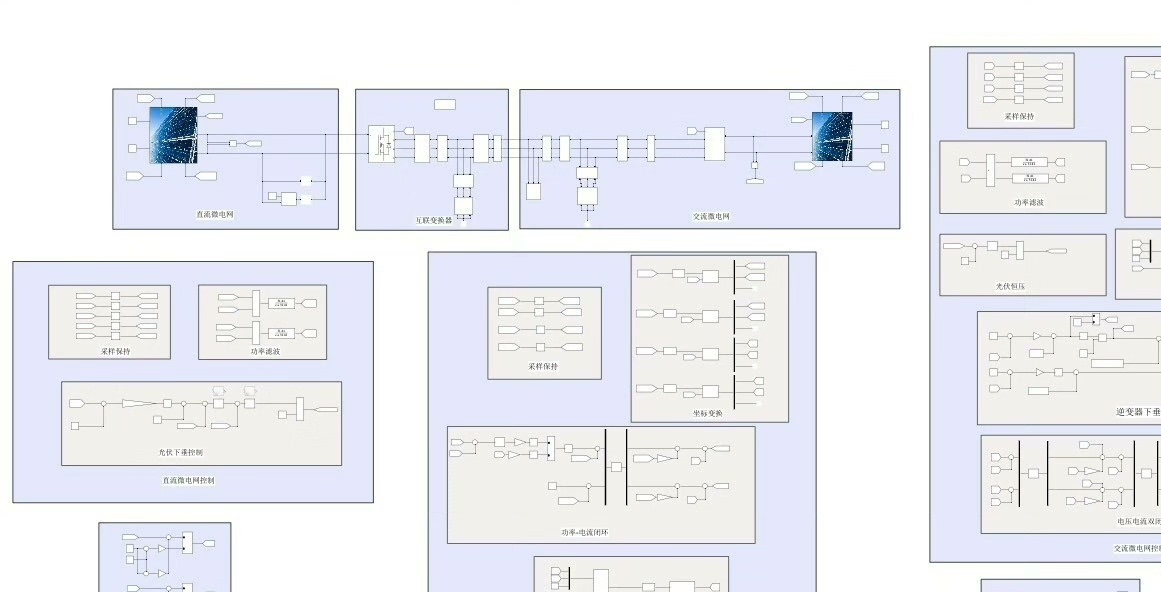
光伏交直流混合微电网离网(孤岛)模式双下垂控制Matlab/Simulink仿真模型 交直流混合微电网结构: 1.直流微电网,由光伏板+Boost变换器组成,最大输出功率10 kW。 2.交流微电网,由光伏板+Boost变换器+LCL逆变器组成,最大输出功率15 kW。 3.互联变换器(ILC),由LCL逆变器组成,用于连接交直流微电网。 模型内容: 1.直流微电网采用下垂控制,控制方式为电压电流双闭环,直流母线额定电压700 V。 2.交流微电网中,Boost变换器采用恒压控制,直流电容电压为700 V,LCL逆变器采用下垂控制,额定频率50 Hz,额定相电压有效值220 V。 3.ILC采用双下垂控制策略,首先将交流母线频率和直流母线电压进行归一化,使其范围控制在[-1,1],之后通过ILC的归一化下垂控制调节交流母线频率和直流母线电压的偏差,最终使二者数值相同。 4.其余部分包括采样保持、坐标变换、功率滤波、SVPWM等环节。 0.5 s时刻负载由12 kW增至16 kW,可以看出系统仍能稳定运行,波形质量良好,且交流母线频率和直流母线电压归一化的参数在ILC控制下趋于一致。 仿真版本为Matlab2020b,由于部分模块低版本没有,因此只能用20b或以上版本
在新能源领域,光伏交直流混合微电网离网(孤岛)模式的研究愈发重要,今天咱们就来聊聊基于Matlab/Simulink的双下垂控制仿真模型。
一、交直流混合微电网结构剖析
- 直流微电网:由光伏板搭配Boost变换器构成,它能输出的最大功率为10kW。在实际场景中,光伏板捕获太阳能并转化为直流电,Boost变换器则负责对电压进行提升等处理,以满足后续用电设备或电网的需求。
- 交流微电网:其组成更为复杂,光伏板产生直流电后,先经过Boost变换器,然后再通过LCL逆变器转化为交流电,最大输出功率可达15kW。Boost变换器在此起到稳定直流侧电压等作用,而LCL逆变器则是实现从直流到交流的关键转换部件,同时还对交流电的波形质量等进行优化。
- 互联变换器(ILC):它由LCL逆变器组成,肩负着连接交直流微电网的重任,让两者之间能够实现电能的顺畅交互。
二、模型具体内容解析
- 直流微电网的下垂控制:采用电压电流双闭环的控制方式,直流母线额定电压设定为700V 。在Simulink模型搭建时,电压环负责维持直流母线电压稳定,电流环则对输出电流进行有效控制,保证电能输出的可靠性。比如在代码实现中,我们可以通过如下方式简单示意电压环的部分控制逻辑(这里只是简单示意,实际更为复杂):
% 假设已经获取到测量的直流母线电压 measured_dc_voltage
% 以及给定的直流母线额定电压 rated_dc_voltage
error_voltage = rated_dc_voltage - measured_dc_voltage;
kp_voltage = 0.5; % 电压环比例系数
ki_voltage = 0.1; % 电压环积分系数
integral_voltage = integral_voltage + error_voltage * Ts; % Ts为采样时间
control_signal_voltage = kp_voltage * error_voltage + ki_voltage * integral_voltage;上述代码中,通过计算电压误差,并利用比例积分控制来生成控制信号,以调节直流微电网的相关参数。
- 交流微电网的控制:Boost变换器采用恒压控制,将直流电容电压稳定在700V。而LCL逆变器采用下垂控制,额定频率为50Hz,额定相电压有效值为220V。以LCL逆变器下垂控制为例,我们来看看可能涉及的一些代码逻辑:
% 假设获取到测量的交流频率 measured_ac_frequency
% 以及额定交流频率 rated_ac_frequency
error_frequency = rated_ac_frequency - measured_ac_frequency;
kp_frequency = 0.01; % 频率下垂控制比例系数
delta_frequency = kp_frequency * (P - P_nom); % P为当前功率,P_nom为额定功率
new_frequency = rated_ac_frequency + delta_frequency;这段代码展示了根据功率偏差来调整交流频率的过程,是下垂控制在交流侧实现的关键部分。
- ILC的双下垂控制策略:这是整个模型的一大亮点。首先要将交流母线频率和直流母线电压进行归一化,把它们的范围控制在[-1,1] 。之后通过ILC的归一化下垂控制去调节交流母线频率和直流母线电压的偏差,最终让二者数值相同。代码实现上可以类似这样:
% 假设已经获取到交流母线频率 ac_frequency 和直流母线电压 dc_voltage
% 以及它们对应的额定值 rated_ac_frequency 和 rated_dc_voltage
normalized_ac_frequency = (ac_frequency - rated_ac_frequency) / rated_ac_frequency;
normalized_dc_voltage = (dc_voltage - rated_dc_voltage) / rated_dc_voltage;
error_normalized = normalized_ac_frequency - normalized_dc_voltage;
kp_normalized = 0.1; % 归一化下垂控制比例系数
control_signal_ILC = kp_normalized * error_normalized;这段代码实现了归一化以及基于归一化参数的偏差调节,确保交直流两侧在ILC的协调下更好地协同工作。
- 其余部分:像采样保持、坐标变换、功率滤波、SVPWM等环节也不可或缺。采样保持环节确保数据的准确采集和稳定传输;坐标变换将不同坐标系下的电量进行转换,方便控制;功率滤波则去除功率信号中的杂波;SVPWM用于生成逆变器所需的脉冲信号,优化输出波形。
三、仿真测试与结果
在0.5s时刻,负载由12kW增至16kW ,从仿真结果来看,系统依旧能够稳定运行,波形质量也相当不错。而且交流母线频率和直流母线电压归一化的参数在ILC控制下逐渐趋于一致。这里需要注意的是,本次仿真使用的是Matlab2020b版本,因为部分模块在低版本中并不存在,所以建议大家使用20b或以上版本进行仿真。
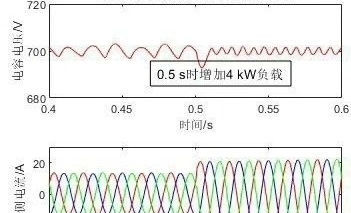
光伏交直流混合微电网离网(孤岛)模式双下垂控制Matlab/Simulink仿真模型 交直流混合微电网结构: 1.直流微电网,由光伏板+Boost变换器组成,最大输出功率10 kW。 2.交流微电网,由光伏板+Boost变换器+LCL逆变器组成,最大输出功率15 kW。 3.互联变换器(ILC),由LCL逆变器组成,用于连接交直流微电网。 模型内容: 1.直流微电网采用下垂控制,控制方式为电压电流双闭环,直流母线额定电压700 V。 2.交流微电网中,Boost变换器采用恒压控制,直流电容电压为700 V,LCL逆变器采用下垂控制,额定频率50 Hz,额定相电压有效值220 V。 3.ILC采用双下垂控制策略,首先将交流母线频率和直流母线电压进行归一化,使其范围控制在[-1,1],之后通过ILC的归一化下垂控制调节交流母线频率和直流母线电压的偏差,最终使二者数值相同。 4.其余部分包括采样保持、坐标变换、功率滤波、SVPWM等环节。 0.5 s时刻负载由12 kW增至16 kW,可以看出系统仍能稳定运行,波形质量良好,且交流母线频率和直流母线电压归一化的参数在ILC控制下趋于一致。 仿真版本为Matlab2020b,由于部分模块低版本没有,因此只能用20b或以上版本
通过对这个光伏交直流混合微电网离网(孤岛)模式双下垂控制Matlab/Simulink仿真模型的研究,我们能更深入地理解微电网在离网状态下的运行特性以及双下垂控制策略的有效性,为实际工程应用提供有力的理论和仿真支持。希望大家也能动手实践,探索更多微电网领域的奥秘。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 7
7 0
0- 0



 已为社区贡献61条内容
已为社区贡献61条内容

所有评论(0)