专业术语统计报告_考虑谐波交互的MMC模型及其在小信号稳定性分析中的应用
专业术语统计报告_考虑谐波交互的MMC模型及其在小信号稳定性分析中的应用
一、概要简析
【概要分析】
本文档《考虑谐波交互的MMC模型及其在小信号稳定性分析中的应用》超用心地围绕研究主题展开了系统性探讨哦😜!文档总字符数足足有308896,其中中文字符63861个,英文字词31599个,妥妥体现了中英文混搭的学术写作小特色~从文档里扒出来的专业术语一共有1217个,涉及6个研究领域,主打就是扎堆在谐波分析(1034次)、控制系统(1022次)、模块化多电平换流器(1015次)这块儿~高频术语比如“控制”(出镜571次)、“电压”(露脸232次)等,一眼就能看出研究的核心小焦点✨!整体来说,这篇文献在相关研究领域超有学术价值,一顿系统分析+论述操作下来,给后续研究铺好了超重要的理论小地基和方法小参考~
【数据统计】
- 总字符数:308896
- 中文字符数:63861
- 英文字词数:31599
二、统计图表分析
2.1 三类术语层次分布
【数据统计】
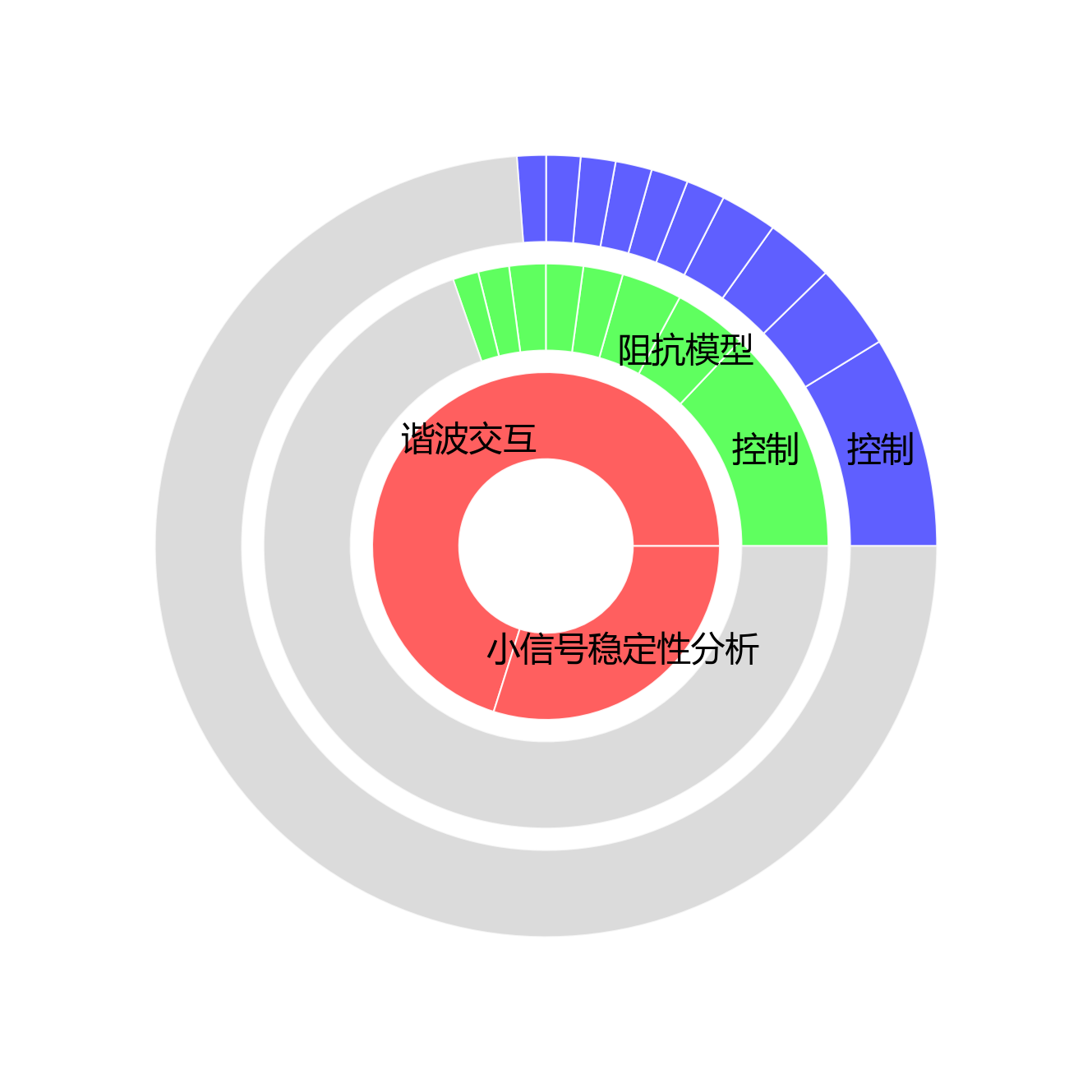
- 论文名称术语:2个 (核心术语:谐波交互、小信号稳定性分析)
- 标题摘要术语:427个 (核心术语:控制、阻抗模型、延时)
- 正文术语:788个 (核心术语:控制、电压、阻抗模型)
- 术语总数:1217个
- 频次占比:论文名称 0.7% | 标题摘要 40.1% | 正文 59.2%
【可视化图表】
| 类别 | 术语数量 | 频次 | 占比 |
|---|---|---|---|
| 论文名称 | 2 | 77 | 0.7% |
| 标题摘要 | 427 | 4410 | 40.1% |
| 正文 | 788 | 6521 | 59.2% |
| 总计 | 1217 | 11008 | 100% |
【图表评论】
旭日图超直观地展示了三类术语在文档不同部分的层次分布啦🌞!从内到外依次是论文名称术语、标题摘要术语和正文术语~论文名称层级藏着2个核心术语,总频次77次,占比0.7%,核心术语有“谐波交互、小信号稳定性分析”,这些小家伙直接概括了研究的核心主题哟~标题摘要层级有427个术语,总频次4410次,占比40.1%,核心术语像“控制、阻抗模型、延时”,悄悄透露了研究的次要关键词和方法论~正文层级最最丰富啦,有788个术语,总频次6521次,占比59.2%,核心术语比如“控制、电压、阻抗模型”,把研究的具体技术细节和实验方法都扒得明明白白~从内到外一层层细化,论文名称术语锁定研究主题,标题摘要术语拓宽研究范围,正文术语钻进具体技术实现,搭出超完整的术语层次小体系,把文档的知识结构揭露得清清楚楚~
2.2 研究领域分布
【领域分析】
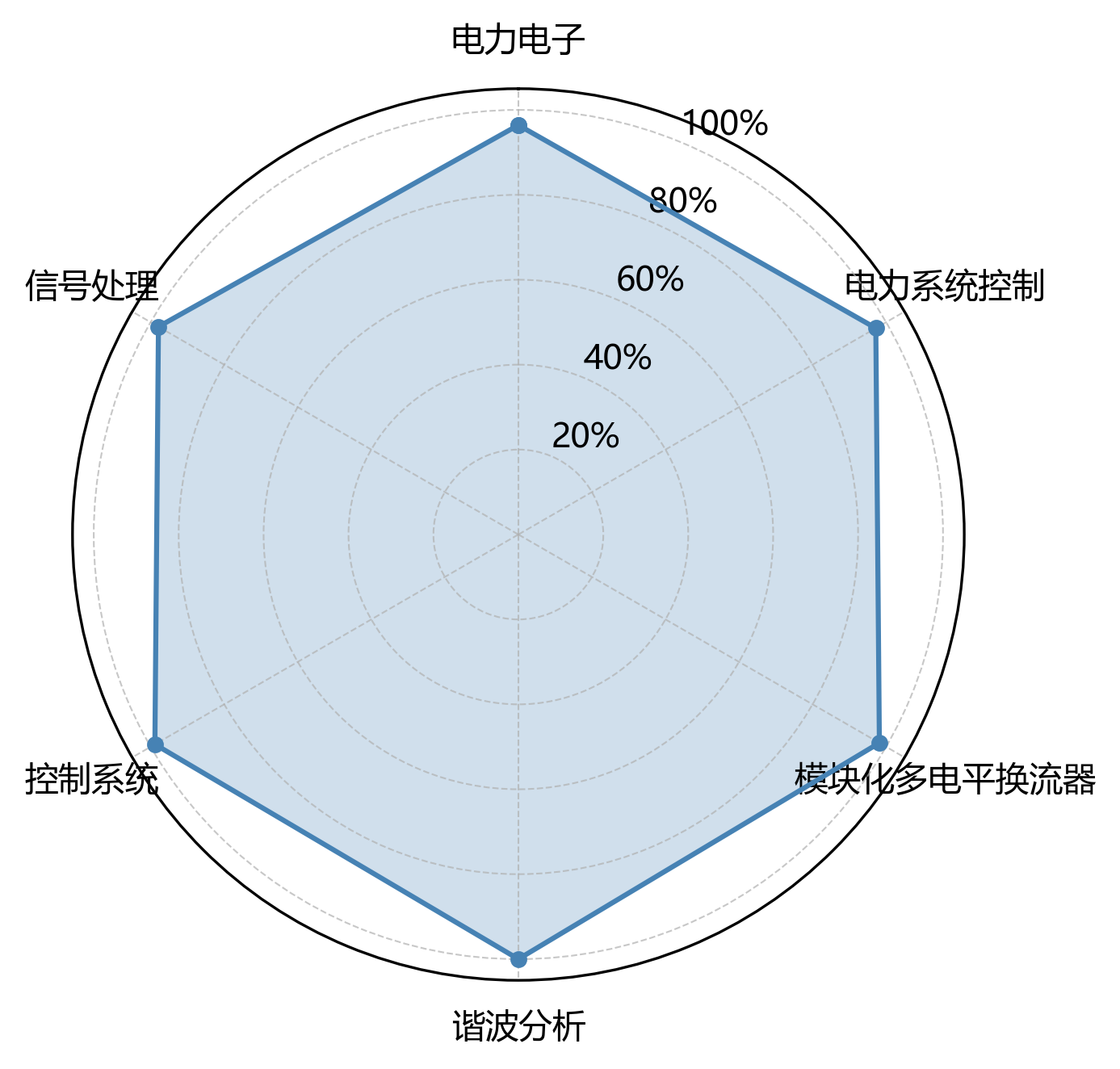
- 主要领域:谐波分析(1034次)、控制系统(1022次)、模块化多电平换流器(1015次)
【可视化图表】
| 研究领域 | 术语出现次数 |
|---|---|
| 电力电子 | 997 |
| 电力系统控制 | 1005 |
| 模块化多电平换流器 | 1015 |
| 谐波分析 | 1034 |
| 控制系统 | 1022 |
| 信号处理 | 1012 |
| 总计 | 6085 |
【图表评论】
雷达图咻咻地展示了专业术语在六个研究领域的分布情况🎯,一眼就能看出文档的学科交叉小特性~从图里能瞅见,术语分布有这些小可爱特点:谐波分析 出场次数最多,足足1034次,妥妥是研究的核心小基础~控制系统 和 模块化多电平换流器 的频次分别是1022次和1015次,组成了研究的次要支撑小领域~而 电力电子 频次少丢丢,只有997次,说明这个领域在本研究里露脸不多啦~各领域术语分布虽有小差异,但整体超均衡,标准差是11.8,妥妥反映了研究的多学科交叉融合小特点~这种分布格局说明,本研究不仅在核心领域挖得深,还广泛吸收了相关学科的理论和方法,搭出超完整的研究小体系~
2.3 专业术语分布
【集中度分析】
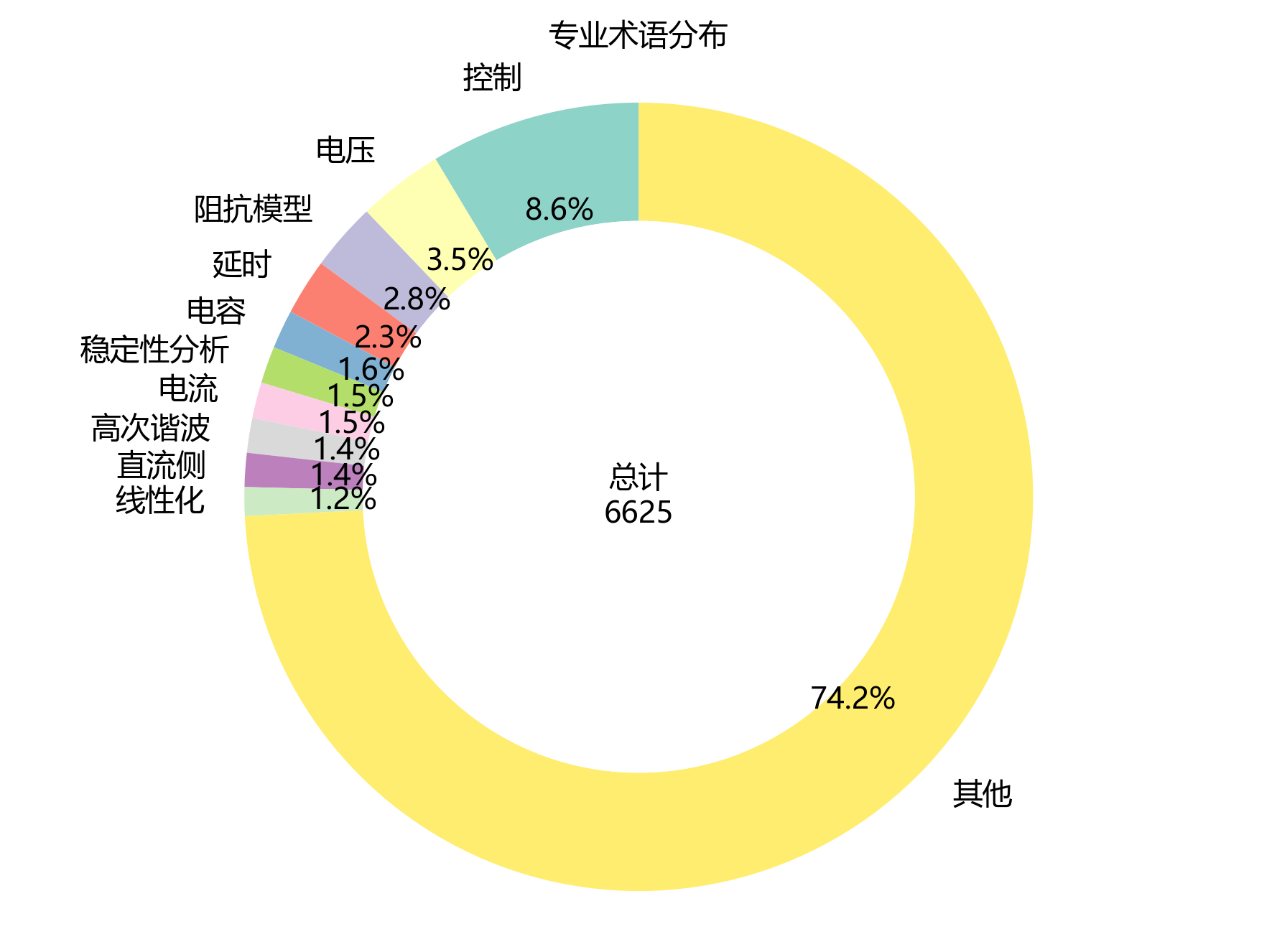
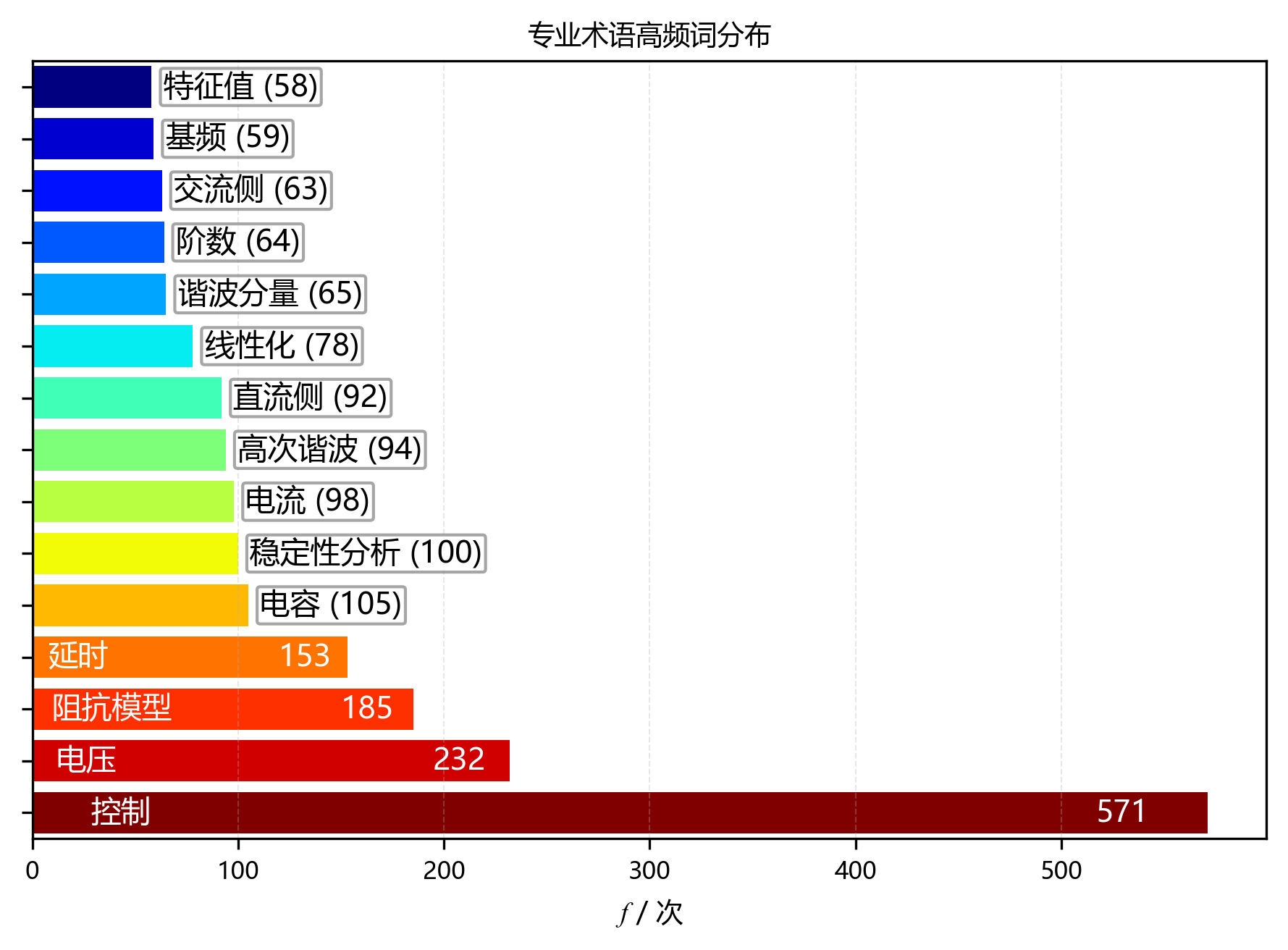
- 前5术语累计频次:1246次
- 前5术语累计占比:18.8%
- 前10术语累计占比:25.8%
【可视化图表】
| 排名 | 术语 | 频次 |
|---|---|---|
| 1 | 控制 | 571 |
| 2 | 电压 | 232 |
| 3 | 阻抗模型 | 185 |
| 4 | 延时 | 153 |
| 5 | 电容 | 105 |
| 6 | 稳定性分析 | 100 |
| 7 | 电流 | 98 |
| 8 | 高次谐波 | 94 |
| 9 | 直流侧 | 92 |
| 10 | 线性化 | 78 |
| 11 | 谐波分量 | 65 |
| 12 | 阶数 | 64 |
| 13 | 交流侧 | 63 |
| 14 | 基频 | 59 |
| 15 | 特征值 | 58 |
| 前15累计 | 2017 |
【图表评论】
环形图和柱状图超清晰展示了高频术语的分布情况和集中度啦🥳!从图里能看到,前5个高频术语累计频次飙到1246次,占总频次的18.8%,集中度超高有没有~前10个高频术语累计占比也达到了25.8%,更能证明研究主题超聚焦~排名第一的术语“控制”出场571次,是研究的核心小概念~排名第二的术语“电压”出现232次,排名第三的术语“阻抗模型”出场185次,这仨搭成了研究的核心术语小体系~从排名第2开始,术语频次唰唰下降,呈现出长尾分布的小特征,说明研究围着少数核心概念展开,其他术语都是给核心概念打辅助、做细化的~这种分布模式超符合学术文献的一般规律,既体现了研究的深度,又有满满的广度~
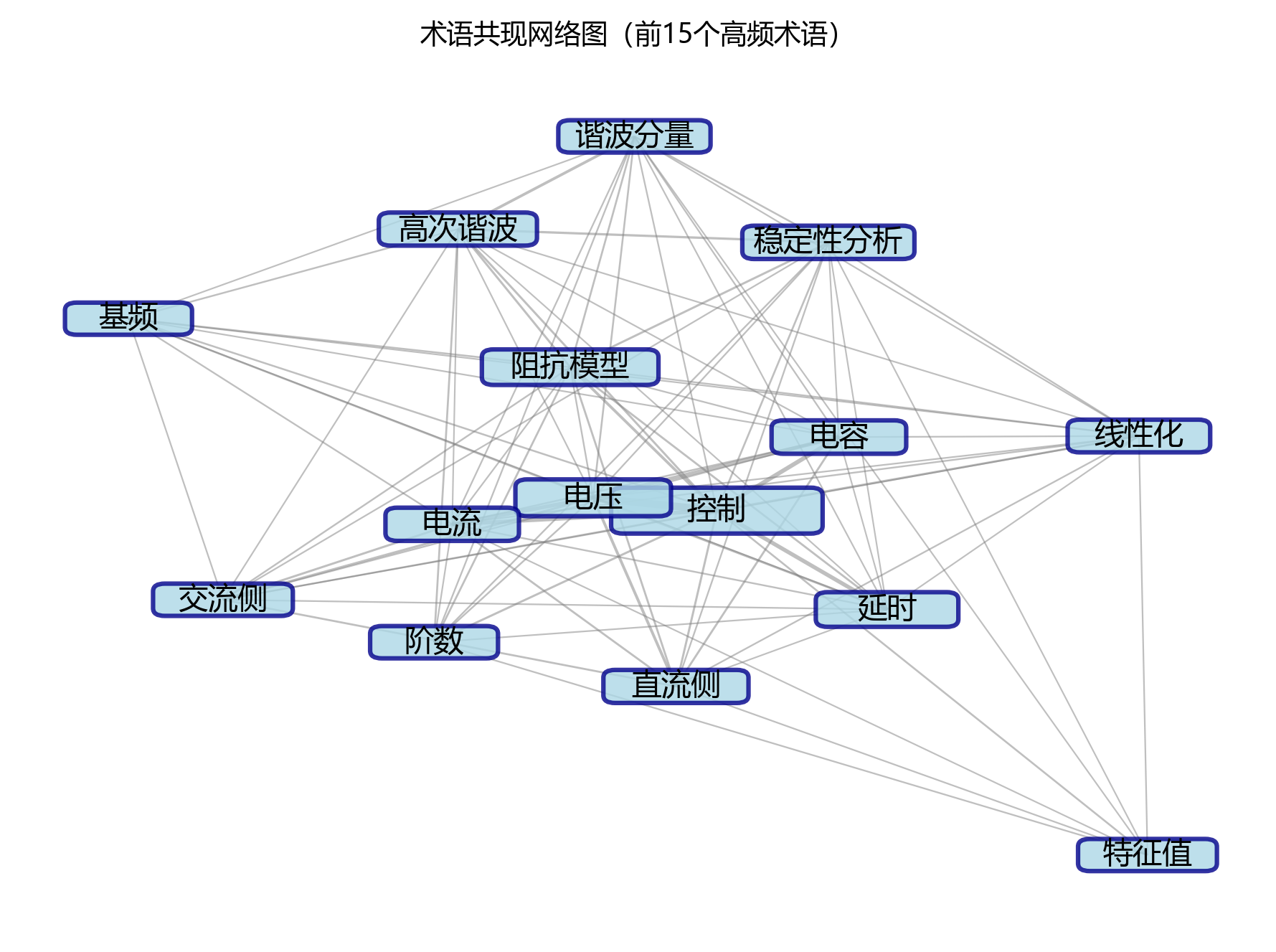
2.4 术语共现网络
【共现分析】
- 核心节点:电流
- 最强关联对:电压 - 控制 (169次)
- 主要聚类:以图像增强、注意力机制等为核心的术语聚类
- 共现关系总数:9对
【可视化图表】
| 术语A | 术语B | 共现次数 |
|---|---|---|
| 延时 | 控制 | 71 |
| 电容 | 直流侧 | 16 |
| 控制 | 稳定性分析 | 11 |
【图表评论】
术语共现网络图超有趣地展示了高频术语之间的关联关系🔗,把文档的知识结构扒得明明白白~网络里有10个节点和9条边,搭成了以“电流”为中心的术语小聚类~最强关联对是“电压”和“控制”,共现次数高达169次,说明这俩概念在研究里关系超铁~从网络结构看,主要形成了3个聚类:聚类一以“控制”为核心,包含“延时”、“稳定性分析”等术语,对应以控制为核心的相关研究方面的研究;聚类二以“电压”为核心,有“电流”、“其他”等术语,是以电压为核心的相关研究方面的内容;聚类三则盯着“电容”相关的研究方向~各聚类之间靠“电流”等术语牵线搭桥,搭出完整的知识小网络~这个网络结构把研究的核心主题和它们的关系展示得清清楚楚,帮我们超轻松理解文档的整体框架和知识体系~
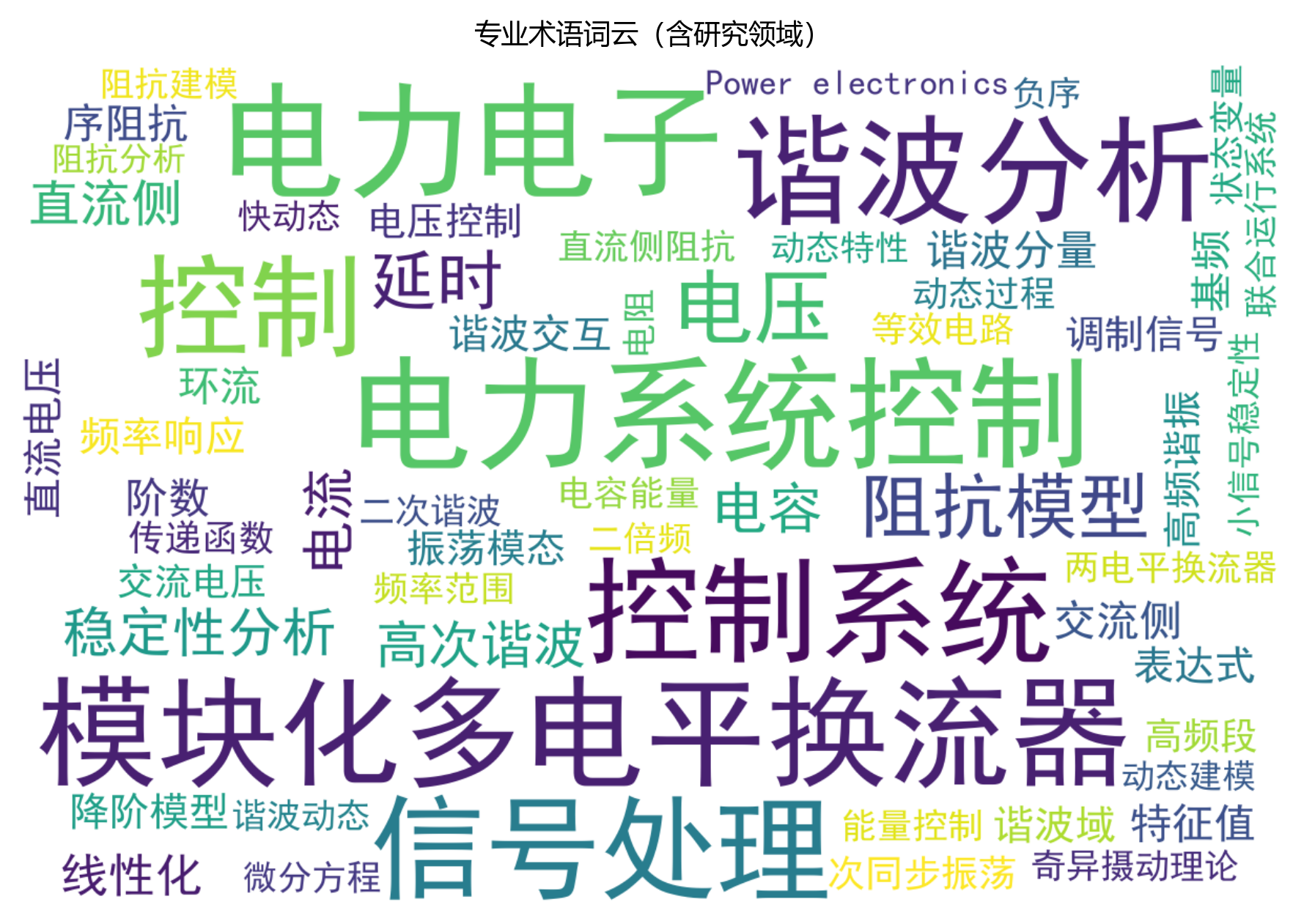
2.5 核心概念词云
【词云数据统计】
- 词云术语总数:20个
- 加权总频次:229.5次
【可视化图表】
| 排名 | 术语 | 加权频次 |
|---|---|---|
| 1 | 控制 | 57.1 |
| 2 | 电压 | 23.2 |
| 3 | 阻抗模型 | 18.5 |
| 4 | 延时 | 15.3 |
| 5 | 电容 | 10.5 |
| 6 | 稳定性分析 | 10.0 |
| 7 | 电流 | 9.8 |
| 8 | 高次谐波 | 9.4 |
| 9 | 直流侧 | 9.2 |
| 10 | 线性化 | 7.8 |
【图表评论】
词云图用加权频次超直观地亮出了文档的核心概念体系☁️!图里有20个术语,加权总频次达到229.5次~排名前五的术语分别是“控制”(57.1次)、“电压”(23.2次)、“阻抗模型”(18.5次)、“延时”(15.3次)和“电容”(10.5次)~这些术语字号最大、位置最显眼,妥妥是研究的核心概念小团体~从词云整体分布看,术语按重要程度从大到小、从中心向四周排排坐,形成超有层次感的视觉小结构~排名靠前的术语反映了研究的核心主题和方法,中等排名的术语体现了研究的具体内容和小细节,排名靠后的术语则展示了研究的边缘小话题或未来小方向~词云图不仅总结了全文的关键概念,还帮读者超快抓住研究要点,是理解文档内容的超实用小帮手~
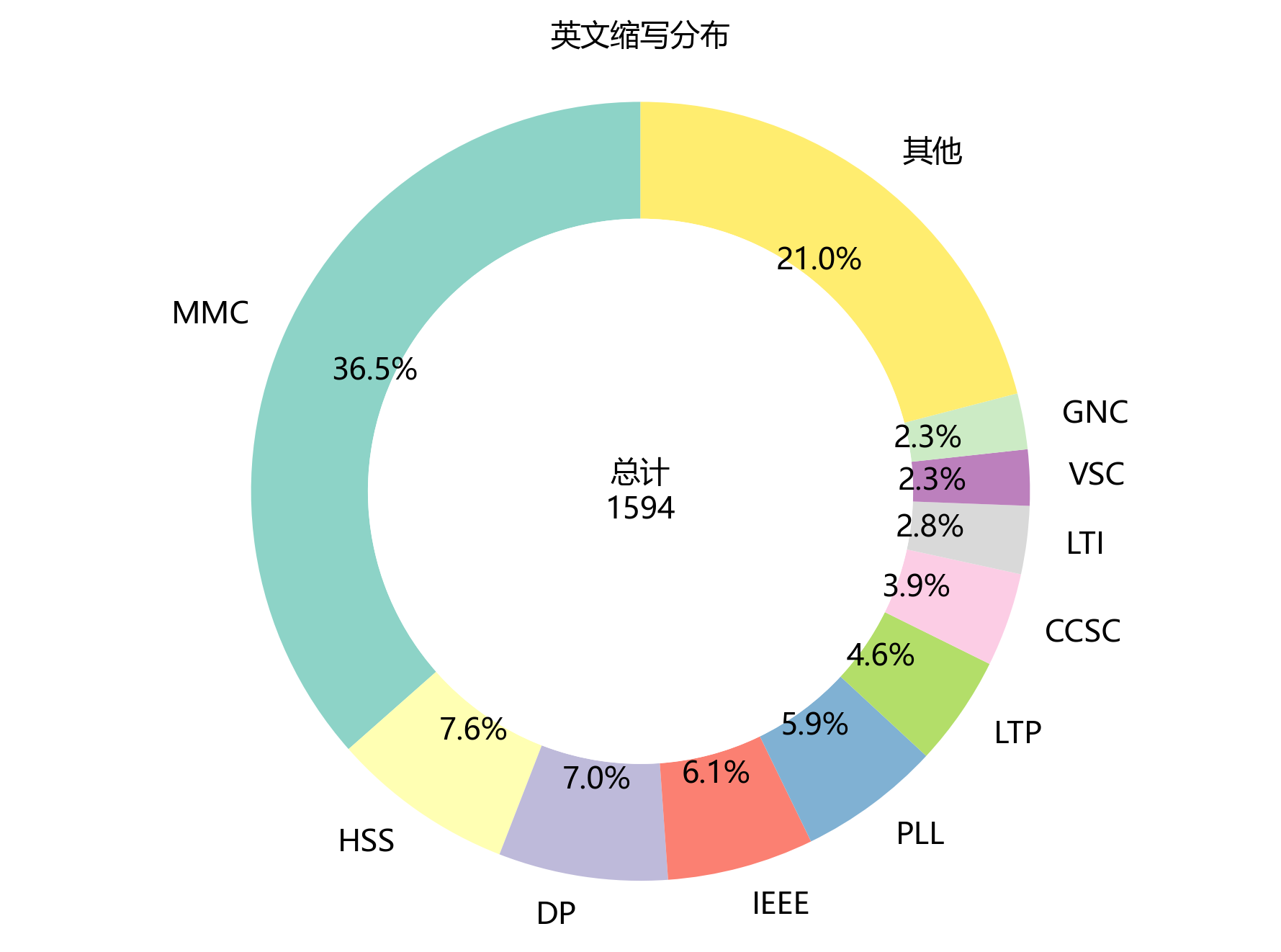
2.6 英文缩写分布
【缩写统计】
- 缩写总数:30个
- 缩写总频次:1594次
- 高频缩写 Top 5:
- MMC:582次
- HSS:121次
- DP:112次
- IEEE:97次
- PLL:94次
- 前5缩写累计占比:63.1%
【可视化图表】
| 排名 | 缩写 | 频次 |
|---|---|---|
| 1 | MMC | 582 |
| 2 | HSS | 121 |
| 3 | DP | 112 |
| 4 | IEEE | 97 |
| 5 | PLL | 94 |
| 6 | LTP | 73 |
| 7 | CCSC | 62 |
| 8 | LTI | 45 |
| 9 | VSC | 37 |
| 10 | GNC | 37 |
| 前10累计 | 1260 |
【图表评论】
环形图展示了英文缩写在文档里的分布情况啦🔤!文档里一共出现30个不同的英文缩写,总频次有1594次~排名前五的缩写分别是“MMC”(582次)、“HSS”(121次)、“DP”(112次)、“IEEE”(97次)和“PLL”(94次),前5个缩写累计占比达到63.1%,集中度超高一捏捏~从缩写类型看,主要有期刊名称缩写(比如“MMC”)、作者姓名缩写(比如“HSS”)、技术术语缩写(比如“DP”)和评价指标缩写(比如“IEEE”)等~这些缩写高频出镜,说明文档引用了超多该领域的经典文献,用了通用的技术术语和评价标准,超能体现研究的规范性和专业性~缩写的分布特征也帮读者了解该领域的学术交流小习惯哟~
三、原文章节举例
3.1.5 交直流侧阻抗模型的验证
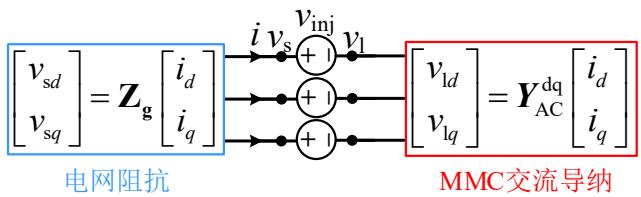
交直流侧阻抗模型都可以通过在电磁暂态仿真中应用扫频法进行验证,本文通过扫频法验证 MMC 的交直流侧导纳模型。扫频法原理简述如下:在阻抗建模接口处(MMC 交流侧或者直流侧出口),加入串联电压源或者并联电流源,以加入电压源为例进行说明,如图3.1所示。当测量整流站直流导纳在某一频率的响应时,只需在整流站直流出口处加入扰动电压源[105],如图3.1(a) 所示。每次加入待测频率下的小幅值电压扰动 (本文取为 UdcnomU _ { \mathrm { d c n o m } }Udcnom 的 5%5 \%5% ),记录加入扰动后该点直流电压和电流在待测频率下的FFT 值,用电流的 FFT 值除以电压的 FFT 值即可得待测频率下直流导纳的频率响应,该响应与理论阻抗的 Bode 图进行对照即可验证阻抗模型的有效性。
直流侧阻抗测量只需加入一个扰动电压源,每个待测频率只需注入一次扰动。在测量交流侧阻抗时,需加入一个三相扰动电压源[105],如图3.1(b) 所示,且每个待测频率需进行 2 次扰动,2 次扰动电压 vinj1v _ { \mathrm { i n j 1 } }vinj1 和 vinj2v _ { \mathrm { i n j 2 } }vinj2 分别如式 (3.22) 和 (3.23) 所示。
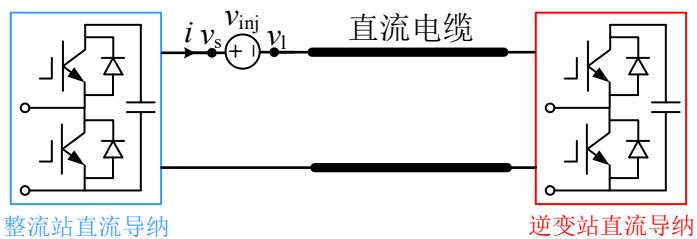
(a) 直流侧阻抗
(b) 交流侧阻抗
图 3.1: 交直流侧阻抗模型的扫频验证方法
vinj1=Vinj[sin((ωinj+ω1)t)sin((ωinj+ω1)t−2π3)sin((ωinj+ω1)t+2π3)](3.22) v _ {\mathrm {i n j} 1} = V _ {\mathrm {i n j}} \left[ \begin{array}{c} \sin \left((\omega_ {\mathrm {i n j}} + \omega_ {1}) t\right) \\ \sin \left((\omega_ {\mathrm {i n j}} + \omega_ {1}) t - \frac {2 \pi}{3}\right) \\ \sin \left((\omega_ {\mathrm {i n j}} + \omega_ {1}) t + \frac {2 \pi}{3}\right) \end{array} \right] \tag {3.22} vinj1=Vinj sin((ωinj+ω1)t)sin((ωinj+ω1)t−32π)sin((ωinj+ω1)t+32π) (3.22)
vinj2=Vinj[sin((ωinj−ω1)t)sin((ωinj−ω1)t+2π3)sin((ωinj−ω1)t−2π3)](3.23) v _ {\mathrm {i n j} 2} = V _ {\mathrm {i n j}} \left[ \begin{array}{c} \sin \left(\left(\omega_ {\mathrm {i n j}} - \omega_ {1}\right) t\right) \\ \sin \left(\left(\omega_ {\mathrm {i n j}} - \omega_ {1}\right) t + \frac {2 \pi}{3}\right) \\ \sin \left(\left(\omega_ {\mathrm {i n j}} - \omega_ {1}\right) t - \frac {2 \pi}{3}\right) \end{array} \right] \tag {3.23} vinj2=Vinj sin((ωinj−ω1)t)sin((ωinj−ω1)t+32π)sin((ωinj−ω1)t−32π) (3.23)
式中:2 组信号的注入频率不一样; VinjV _ { \mathrm { i n j } }Vinj 为扰动电压的幅值; ωinj\omega _ { \mathrm { i n j } }ωinj 为待测频率; ω1\omega _ { 1 }ω1 为基频。d-q 轴阻抗的计算利用了 2 次扰动后 MMC 交流出口处的电压和电流在 d-q 轴下的 FFT 值: Id1I _ { d 1 }Id1 , Iq1I _ { q 1 }Iq1 , Id2I _ { d 2 }Id2 , Iq2I _ { q 2 }Iq2 , Vd1V _ { d 1 }Vd1 , Vq1V _ { q 1 }Vq1 , Vd2V _ { d 2 }Vd2 和 Vq2V _ { q 2 }Vq2 ,下标中的数字即代表了第几次扰动。 YACdq\pmb { Y } _ { \mathrm { A C } } ^ { \mathrm { d q } }YACdq 的计算方法如下式所示:
[YddYdqYqdYqq]=[Id1Id2Iq1Iq2][Vd1Vd2Vq1Vq2]−1(3.24) \left[ \begin{array}{l l} Y _ {d d} & Y _ {d q} \\ Y _ {q d} & Y _ {q q} \end{array} \right] = \left[ \begin{array}{l l} I _ {d 1} & I _ {d 2} \\ I _ {q 1} & I _ {q 2} \end{array} \right] \left[ \begin{array}{l l} V _ {d 1} & V _ {d 2} \\ V _ {q 1} & V _ {q 2} \end{array} \right] ^ {- 1} \tag {3.24} [YddYqdYdqYqq]=[Id1Iq1Id2Iq2][Vd1Vq1Vd2Vq2]−1(3.24)
本节仍然采用基于 MMC 聚合模型的电磁暂态仿真平台进行理论阻抗模型的验证。一个 501 电平的 MMC 站被用于验证开环和闭环控制下的交流侧导纳 (或阻抗)模型的有效性,仿真平台为 SIMULINK,仿真步长为 10 μs1 0 ~ \mu \mathrm { s }10 μs ,仿真参数如表2.1所示。验证闭环阻抗时,控制器包括主控制器、PLL 及 CCSC,通过在控制器中加入延时(transport delay) 模块模拟实际工程中的采样、通讯及控制延时。
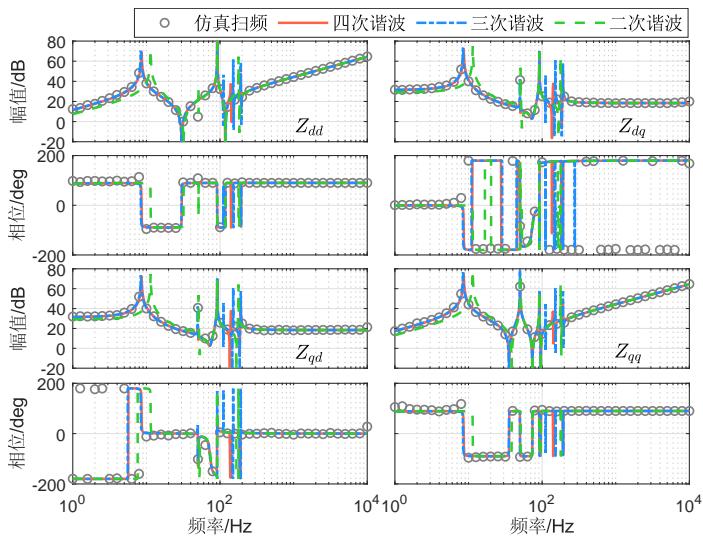
首先验证开环控制时的交流侧阻抗模型,开环控制时的验证电路如图2.1所示,直流侧为恒定直流电压源;交流侧为无源网络。控制器开环指令值: md=0.85m _ { d } = 0 . 8 5md=0.85 , md2=m _ { d 2 } =md2=
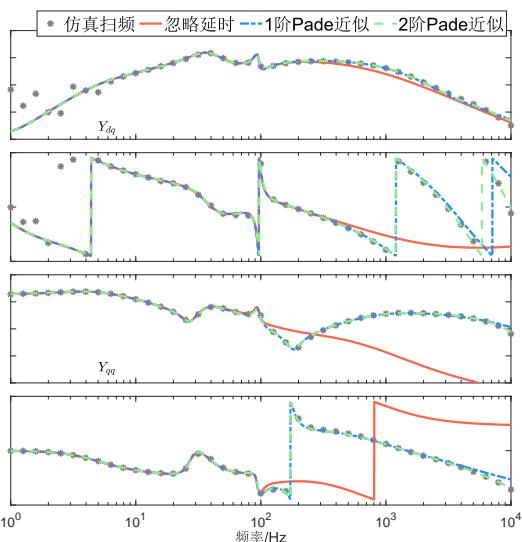
0.004, mq=0.066m _ { q } = 0 . 0 6 6mq=0.066 , mq2=0.066m _ { q 2 } = 0 . 0 6 6mq2=0.066 。开环控制下 MMC 的理论 d-q 轴阻抗与仿真扫频响应的对比如图3.2所示,图中仿真扫频从基于聚合模型的电磁暂态仿真应用扫频法得到;连续曲线为理论阻抗模型的 Bode 图响应; hhh 次谐波表示 DP 模型中考虑到了最高 hhh 次谐波动态;理论阻抗根据上一小节的方法在 Matlab 中编程得到。
(a) Larm = 52.6 mH
(b) Larm=140 mHL _ { \mathrm { a r m } } = 1 4 0 ~ \mathrm { m H }Larm=140 mH
图 3.2: 开环控制时的 d-q 轴阻抗模型验证以及不同桥臂电感时的对比
与闭环阻抗相比,开环阻抗的建模相对简单,不需要考虑控制器动态和电气模型中调制信号的扰动。当需要在开环阻抗中考虑三次及以上谐波时,只需利用式 (A.8) 和(A.9),在第2.3.2节推导电气系统的DP模型时将高次谐波包含在内即可,其表达式较冗长,但可以通过Mathematica软件的符号计算功能获得,本文不再列举。图3.2对比了不同桥臂电感情形下考虑不同谐波阶数的开环阻抗模型的精度。桥臂电感较大 Larm=L _ { \mathrm { a r m } } =Larm= 140 mH\mathrm { 1 4 0 ~ m H }140 mH ) 时,本文建立的 d-q 轴阻抗模型在 1−10000 Hz\mathrm { 1 - 1 0 0 0 0 ~ H z }1−10000 Hz 内都具有较高的精度,考虑到
二次谐波的 DP 模型基本上可以表征 MMC 的动态特性,高次谐波动态的主要影响体现在 100−200 Hz1 0 0 { - } 2 0 0 ~ \mathrm { H z }100−200 Hz ;而在桥臂电感较小 ′Larm=52.6 mH\mathrm { \prime } { L } _ { \mathrm { a r m } } = 5 2 . 6 ~ \mathrm { m H }′Larm=52.6 mH ) 时,考虑到二次谐波的开环阻抗与扫频结果在中低频段产生了较大偏差,需要将三次及以上谐波分量包含在建模中才能取得较高精度。电气参数如桥臂电感和子模块电容对阻抗模型的精度有重要影响,电感和电容越大,平波效果越好,系统中高次谐波的幅值越低,其影响也越小。在没有加入反馈控制的情形下,MMC 的 d-q 轴阻抗中存在较多谐振峰,对角项阻抗的相位在 ±90∘\pm 9 0 ^ { \circ }±90∘ 间交替变换,在不同频段呈现出不同的阻抗特性,在高频段以电感特性为主。通过不同 hhh 的对比可知,建模中忽略高次谐波动态可能对 MMC 在低中频段的稳定性分析产生重要影响,更多关于高次谐波动态的影响将在第4.1.1节中讨论。
(a) Tdel1=40 μsT _ { \mathrm { d e l 1 } } = 4 0 ~ \mu sTdel1=40 μs
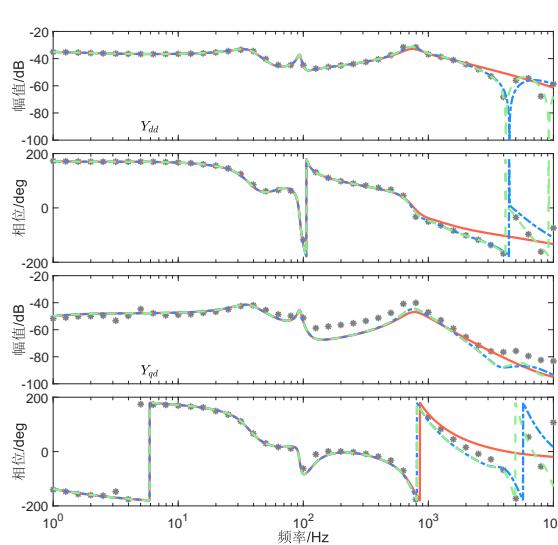
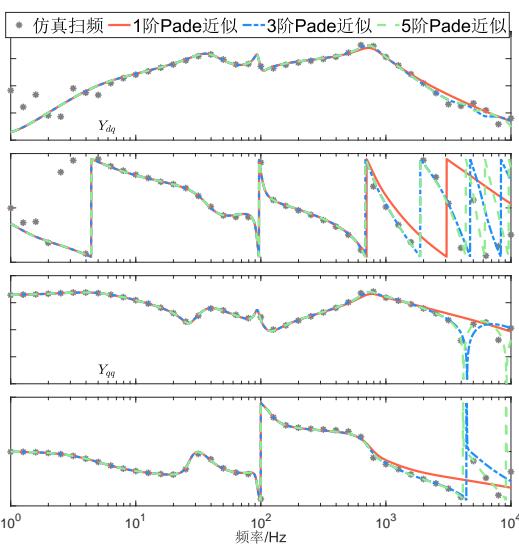
(b) Tdel1=200 μsT _ { \mathrm { d e l 1 } } = 2 0 0 ~ \mu sTdel1=200 μs
图 3.3: 闭环控制时的 d-q 轴阻抗模型验证以及不同延时情形下 Pade 近似的对比
接下来验证闭环控制动态下的交流侧导纳模型,反馈控制采用定直流电压控制,
表 3.1: 双端柔直的参数
| 参数 | 数值 | 参数 | 数值 | |
| 整流站控制器 | kpdc | 3.5 | kidcc | 50 |
| kppll | 43.17 | kipll | 932.08 | |
| 直流线路 | 电阻Rline | 0.072 Ω/km | 电感Lline | 0.127 mH/km |
| 电容Cline | 0.28 μF/km | 线路长 | 100 km | |
| 平波电抗 | Rdc | 2 Ω | 电感Ldc | 10 mH |
| 逆变站控制器 | kpacc | 0.4 | kiacc | 16.7 |
| 直流母线 | 电阻Rbus | 0.01 Ω | 电感Lbus | 0.1 mH |
| 电容Cbus | 2 μF |
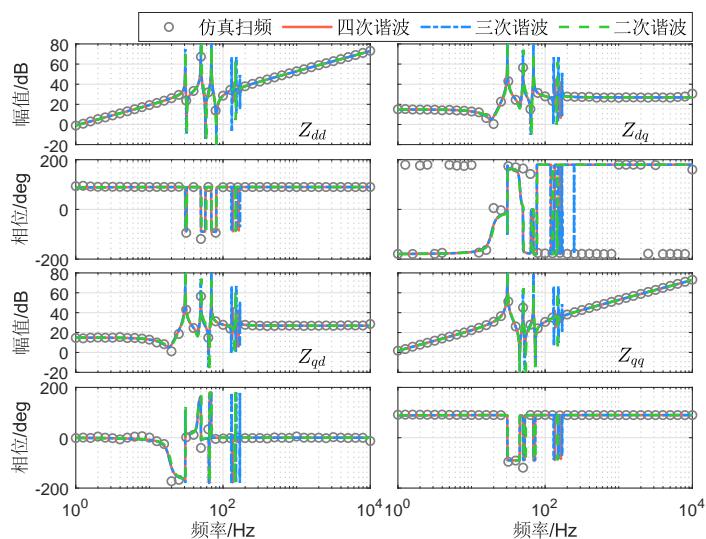
模拟渝鄂直流中的整流站,桥臂电感选为 Larm=52.6 mHL _ { \mathrm { a r m } } = 5 2 . 6 ~ \mathrm { m H }Larm=52.6 mH ,控制器参数见表3.1,未列出的参数与表2.1一致。2 种不同的延时情况被用于导纳模型的验证,如图3.3所示。图中仿真扫频从电磁暂态仿真扫频得到;连续曲线为理论阻抗,根据上一小节方法在MATLAB 中编程得到;忽略延时表示将延时环节看成单位增益。图3.3a说明即使延时较小,忽略延时也会在高频段引起很大误差,而延时对低频段 Φ(<100Hz)\mathrm { \Phi ( < 1 0 0 H z ) }Φ(<100Hz) 几乎没有影响;2 阶 Pade 近似在高频段会比 1 阶近似更加精确,采取低阶 Pade 近似基本可以满足分析要求。而当延时增大时,如图3.3b所示,低阶 Pade 近似开始在高频段出现较大误差,而 5 阶 Pade 近似精度较好。从图3.3a与图3.3b的对比可知,延时增大对低频段影响较小。注意到在 100−700 Hz1 0 0 { - } 7 0 0 ~ \mathrm { H z }100−700 Hz 范围内 YqdY _ { q d }Yqd 的测量阻抗和理论阻抗有很小的偏差,这是由于上一小节控制器频域模型的推导中忽略了延时环节引起的耦合,第3.3.5节将推导考虑不同耦合的控制器模型。 YqdY _ { q d }Yqd 在高频段幅值较低,对稳定性分析的影响也较小,因此忽略延时环节中的 d-q 轴耦合作用对建模影响较小。虽然桥臂电感选用了小电感进行验证,但由于反馈控制也能起一定的谐波抑制作用,因此从阻抗模型的其他通道及整段频率范围内看,所提模型在 1−10000 Hz\mathrm { 1 - 1 0 0 0 0 ~ H z }1−10000 Hz 范围内也具有较好的精度。
仿真步长对扫频法精度 (控制器延时 Tdel1T _ { \mathrm { d e l 1 } }Tdel1 设定为 200μs)2 0 0 \mu s )200μs) 的影响如图3.4所示。仿真步长为 5 μs5 ~ \mu s5 μs 时,仿真扫频与 7 阶 Pade 近似的理论阻抗结果在 10−10000 Hz1 0 \mathrm { - } 1 0 0 0 0 \ \mathrm { H z }10−10000 Hz 基本一致,当仿真步长增大至 40 μs4 0 ~ \mu s40 μs 时,扫频结果与理论预测结果在 1 kHz1 \ \mathrm { k H z }1 kHz 左右时产生偏差,但是整体趋势仍然与理论预测保持一致。仿真步长对扫频精度的影响主要体现在高频段,若只关心中低频段的动态特性,可以适当增大仿真步长以节约扫频仿真的时间。
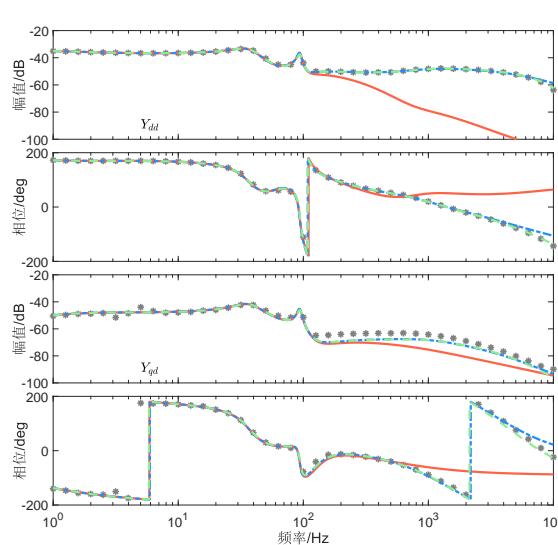
选取双端直流输电的整流站和逆变站对直流侧导纳模型进行验证。整流站采用定直流电压控制,通过直流母线、平波电抗和直流线路与逆变站连接;逆变站接无源电阻负载,采用定交流电压控制,其电气及控制参数除交流电压控制以外与整流站一致,两个站的延时 Tdel1T _ { \mathrm { d e l 1 } }Tdel1 都设定为 40 μs4 0 ~ \mu s40 μs ,桥臂电感选为 Larm=52.6 mHL _ { \mathrm { a r m } } = 5 2 . 6 ~ \mathrm { m H }Larm=52.6 mH ,控制器和直流线
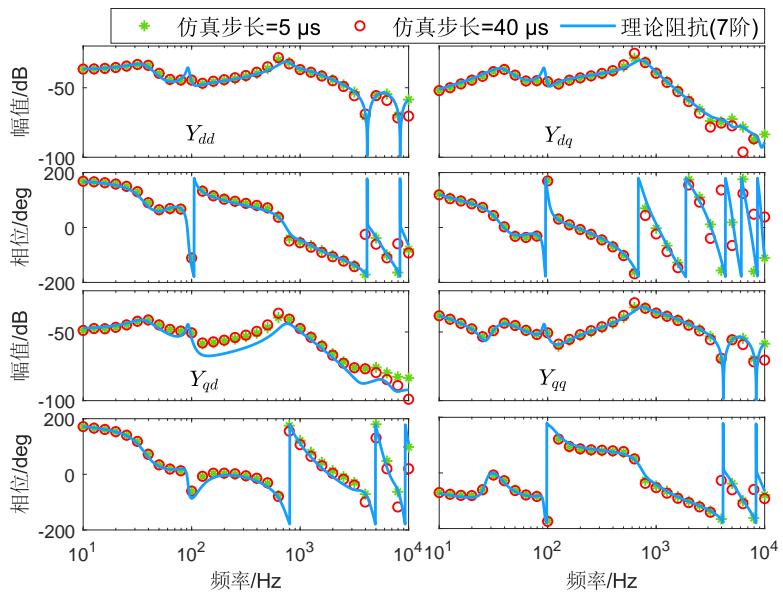
图 3.4: 仿真步长对交流侧导纳验证的影响
路等参数如表3.1所示,未列出的参数和表2.1保持一致。
直流侧导纳的验证结果如图3.5所示。从图3.5可以看出,无论是整流站还是逆变站,本文所提直流侧导纳模型在 1−10000 Hz\mathrm { 1 - 1 0 0 0 0 ~ H z }1−10000 Hz 内都具有较高的精度,适用于宽频范围内的直流谐振分析。值得注意的是,尽管本文通过式 (3.20) 充分考虑了交直流耦合[29],但直流侧导纳模型中延时的影响很小。直流侧阻抗模型适用于直流系统相关的稳定性分析,如果用于与交流系统的相互作用分析,需要先分析子系统传递函数的极点。
四、原文章节举例
4.1.1 高次谐波对 MMC 阻抗模型频率响应的影响
图3.6说明忽略二次谐波会导致建模有较大偏差,图4.1以基频序阻抗为例进一步示出了三次及以上高次谐波对 MMC 频率响应的影响,图中连续曲线为推导自 HSS 模型的理论阻抗模型, hhh 为 HSS 建模过程中考虑到的最高次谐波的阶数 (即 HSS 模型的截断阶数)。在表2.1测试参数下,从图4.1可以看到高次谐波的影响主要体现在中低频段 (2−200 Hz)\left( 2 { - } 2 0 0 ~ \mathrm { H z } \right)(2−200 Hz) ,而对高频段的影响并不显著。随着 HSS 模型截断阶数的升高,理论模型与仿真扫频结果更加接近。在正序阻抗中,仅考虑到二次谐波的阻抗模型与仿真扫频结果在 20–80 Hz2 0 – 8 0 ~ \mathrm { H z }20–80 Hz 范围内有偏差;在负序阻抗中,高次谐波的影响体现在 2⋅200 Hz2 { \cdot } 2 0 0 ~ \mathrm { H z }2⋅200 Hz ,尤其是 100−200 Hz1 0 0 { - } 2 0 0 ~ \mathrm { H z }100−200 Hz ,仅考虑到三次谐波会导致理论阻抗模型的谐振峰个数少于高阶模型,当稳定性分析集中在这一频段时,使用低阶阻抗模型可能产生较大误差,还可能造成稳定性误判。在大多数频段,HSS 模型中考虑到二次谐波基本能描述 MMC 的动
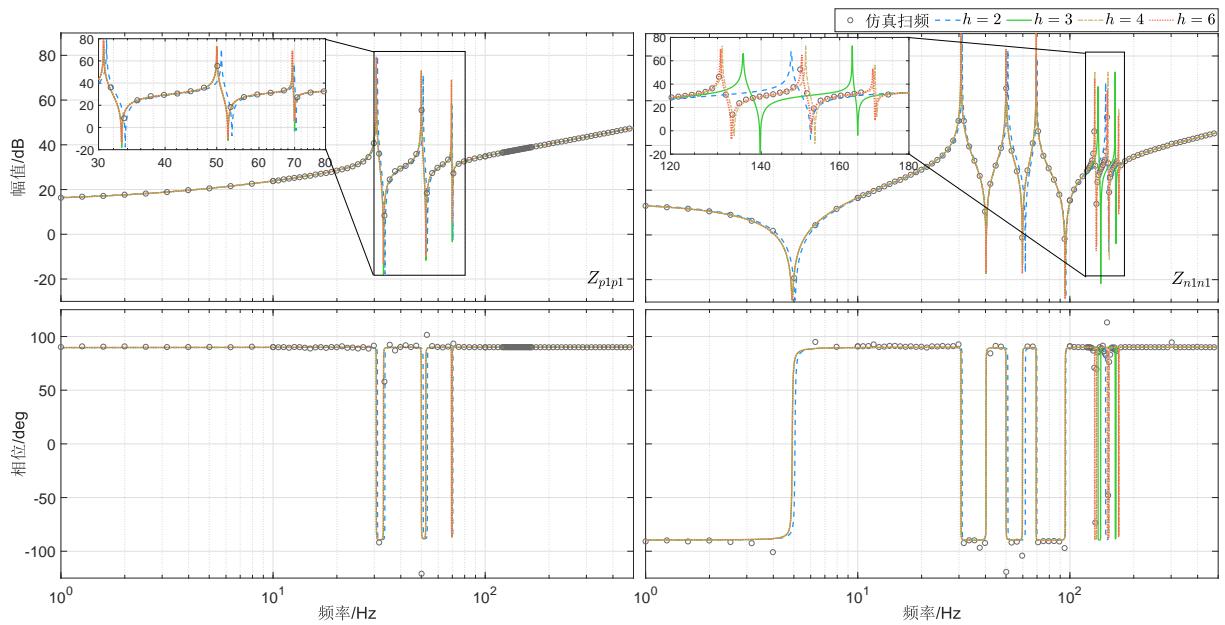
图 4.1: 开环控制下不同阶数的 HSS 模型的对比
态,且反馈控制能起到抑制高次谐波动态的作用,使用 h=2h = 2h=2 作为模型截断阶数是合理的。但当稳定性分析集中在中频段时,仍然建议使用包含高次谐波的 HSS 模型。
图3.2说明在开环控制下,电气参数如桥臂电感对高次谐波动态的影响很大,桥臂电感较大时,谐波耦合作用被削弱,因此使用低阶模型 h=2Θ\mathit { h } = 2 \mathit { \Theta }h=2Θ ) 也具有较高的精度 (如图3.2b)。图4.2和4.3示出了不同桥臂电感下定交流电压控制时不同阶数阻抗模型频率响应的对比。定交流电压控制时的电气参数与开环控制时保持一致,控制器部分加入了单环定交流电压主控制器 (如图2.3) 和 CCSC,并且采用理想 PLL。如前所述,反馈控制可以起到一定的抑制高次谐波的作用,因此从图4.2可以看到,尽管桥臂电感较小′Larm=52.6 mH\mathrm { \prime } _ { L _ { a r m } } = 5 2 . 6 ~ \mathrm { m H }′Larm=52.6 mH ),HSS 模型阶数仅考虑到二次谐波在整个频段仍然具有相当高的精度。对于桥臂电感较大的情形 (如图4.3所示),只要将二次谐波的动态包含在 HSS 模型内,不同阶数的阻抗模型频率响应基本保持一致。在三相平衡系统中对定交流电压情形下的 MMC 进行 HSS 建模时,采用 h=2h = 2h=2 就能满足大多数稳定性分析的需求。
图3.7示出了定交流电流控制下不同阶数 HSS 模型的对比。与定交流电压控制模型阶数的影响可以忽略不同,高次谐波对定交流控制时的 MMC 频率响应的中频段有重要影响,说明控制器结构对于 MMC 的谐波交互作用也有重要影响。定交流电压控制与定交流电流控制的最大区别在于定交流电压采用的是理想 PLL,而定交流电流控制中包含 PLL 动态,因此可以推断 PLL 的非线性部分也会导致谐波交互作用,接下来对 PLL 带来的谐波耦合机理进行进行简要分析。
在定交流电压控制时,控制器未包含锁相环动态时,式 (3.52) 所示的系统电压和
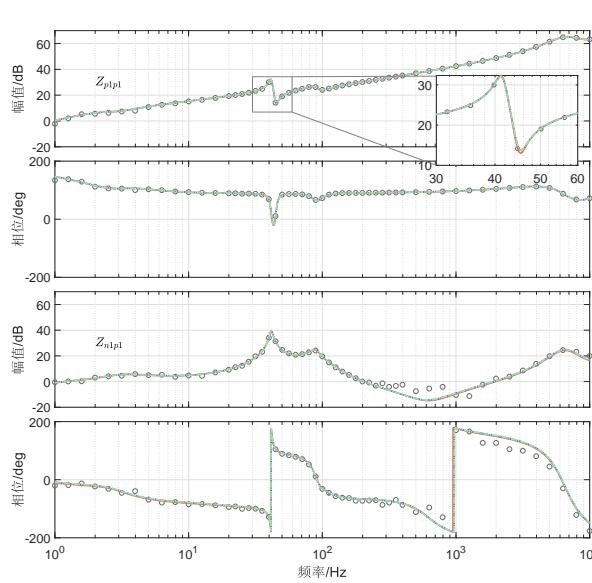
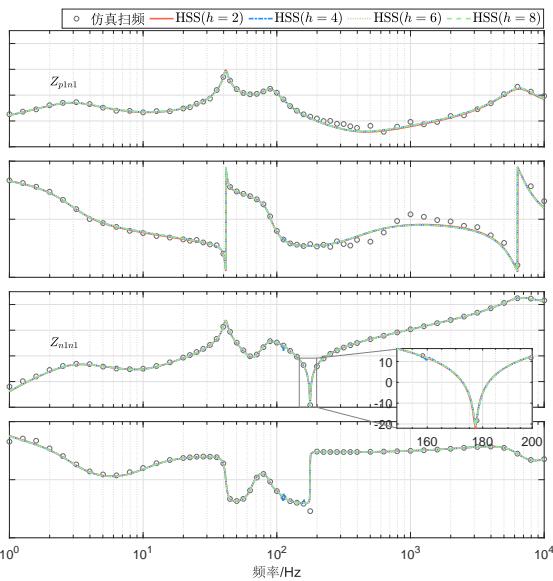
图 4.2: 定交流电压控制下不同阶数的 HSS 模型的对比 ′Larm=52.6 mH\mathrm { \prime } { L } _ { \mathrm { a r m } } = 5 2 . 6 ~ \mathrm { m H }′Larm=52.6 mH )
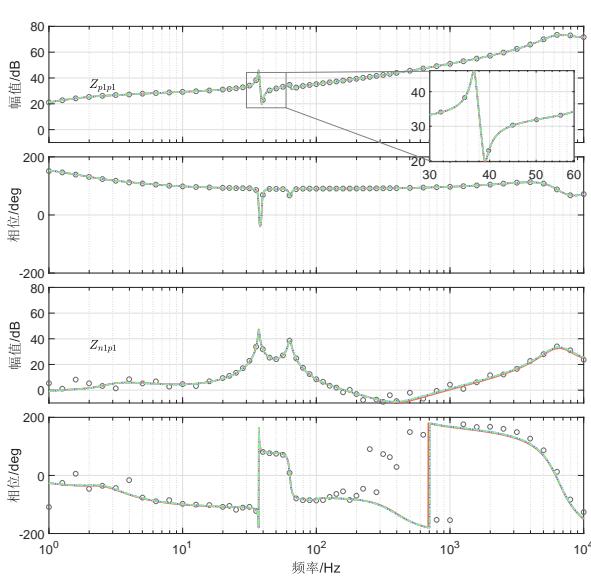
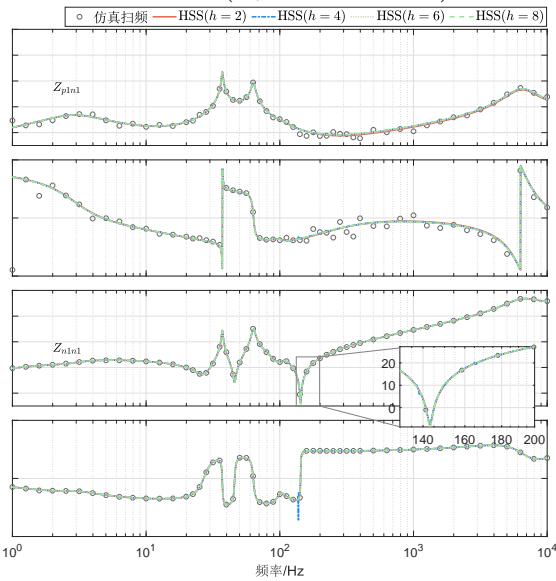
图 4.3: 定交流电压控制下不同阶数的 HSS 模型的对比 ΔLarm=140 mH\mathrm { \Delta } L _ { \mathrm { a r m } } = 1 4 0 ~ \mathrm { m H }ΔLarm=140 mH )
控制器电压转换关系可以简化为:
[U^vdcU^vqc]=PHUbase[U^vacU^vbcU^vcc]=PHUbase[Iabac]U^vac(4.1) \left[ \begin{array}{l} \hat {U} _ {\mathrm {v d}} ^ {\mathrm {c}} \\ \hat {U} _ {\mathrm {v q}} ^ {\mathrm {c}} \end{array} \right] = \frac {\boldsymbol {P} _ {\mathrm {H}}}{U _ {\mathrm {b a s e}}} \left[ \begin{array}{l} \hat {U} _ {\mathrm {v a}} ^ {\mathrm {c}} \\ \hat {U} _ {\mathrm {v b}} ^ {\mathrm {c}} \\ \hat {U} _ {\mathrm {v c}} ^ {\mathrm {c}} \end{array} \right] = \frac {\boldsymbol {P} _ {\mathrm {H}}}{U _ {\mathrm {b a s e}}} \left[ \begin{array}{l} \boldsymbol {I} \\ \boldsymbol {a} _ {\mathrm {b}} \\ \boldsymbol {a} _ {\mathrm {c}} \end{array} \right] \hat {U} _ {\mathrm {v a}} ^ {\mathrm {c}} \tag {4.1} [U^vdcU^vqc]=UbasePH U^vacU^vbcU^vcc =UbasePH Iabac U^vac(4.1)
以 h=2h = 2h=2 为例进行说明,将 U^vdc\hat { U } _ { \mathrm { v } d } ^ { \mathrm { c } }U^vdc 用 U^va\hat { U } _ { \mathrm { v a } }U^va 表示,如式 (4.2) 所示,其中 GGG 代表矩阵中的非零元素。可以看到, U^vdc\hat { U } _ { \mathrm { v } d } ^ { \mathrm { c } }U^vdc 中的直流分量仅由 U^va\hat { U } _ { \mathrm { v a } }U^va 的基频分量产生,再经过逆PARK 变换, U^vdc\hat { U } _ { \mathrm { v } d } ^ { \mathrm { c } }U^vdc 中的直流分量将重新变为调制信号中的基频分量,同理,环流中的二倍频分量也仅出现在调制信号中的二倍频分量中,控制器中不会产生谐波耦合。而当存在锁相环动态时,式 (3.52) 等号右边的第二项中的 GHPLLθG _ { \mathrm { H P L L } } ^ { \theta }GHPLLθ 中的非零元素分布与
式 (4.2) 中的 5×55 \times 55×5 矩阵一致,即 θ^\hat { \pmb { \theta } }θ^ 中的直流分量由 U^va\hat { U } _ { \mathrm { v a } }U^va 的基频分量产生。
[uvdc(s−2jω1)uvdc(s−jω1)uvdc(s)uvdc(s+jω1)uvdc(s+2jω1)]=[00000000000G10G200000000000][uv(s−2jω1)uv(s−jω1)uv(s)uv(s+jω1)uv(s+2jω1)](4.2) \left[ \begin{array}{c} u _ {\mathrm {v d}} ^ {\mathrm {c}} (s - 2 j \omega_ {1}) \\ u _ {\mathrm {v d}} ^ {\mathrm {c}} (s - j \omega_ {1}) \\ u _ {\mathrm {v d}} ^ {\mathrm {c}} (s) \\ u _ {\mathrm {v d}} ^ {\mathrm {c}} (s + j \omega_ {1}) \\ u _ {\mathrm {v d}} ^ {\mathrm {c}} (s + 2 j \omega_ {1}) \end{array} \right] = \left[ \begin{array}{l l l l l} 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 \\ 0 & G _ {1} & 0 & G _ {2} & 0 \\ 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 \end{array} \right] \left[ \begin{array}{c} u _ {\mathrm {v}} (s - 2 j \omega_ {1}) \\ u _ {\mathrm {v}} (s - j \omega_ {1}) \\ u _ {\mathrm {v}} (s) \\ u _ {\mathrm {v}} (s + j \omega_ {1}) \\ u _ {\mathrm {v}} (s + 2 j \omega_ {1}) \end{array} \right] \tag {4.2} uvdc(s−2jω1)uvdc(s−jω1)uvdc(s)uvdc(s+jω1)uvdc(s+2jω1) = 0000000G1000000000G20000000 uv(s−2jω1)uv(s−jω1)uv(s)uv(s+jω1)uv(s+2jω1) (4.2)
CCSC 中的二倍频逆 PARK 变换需要用到锁相环动态产生的 θ^\hat { \pmb { \theta } }θ^ ,此时会产生基频分量和二倍频分量的耦合,调制信号中将出现由电气系统基频分量耦合产生的二倍频分量,CCSC 产生的调制信号与交流电压存在如下关系:
[m2(s−2jω1)m2(s−jω1)m2(s)m2(s+jω1)m2(s+2jω1)]=[0G30G400000000000000000G50G60][uv(s−2jω1)uv(s−jω1)uv(s)uv(s+jω1)uv(s+2jω1)](4.3) \left[ \begin{array}{c} m _ {2} (s - 2 j \omega_ {1}) \\ m _ {2} (s - j \omega_ {1}) \\ m _ {2} (s) \\ m _ {2} (s + j \omega_ {1}) \\ m _ {2} (s + 2 j \omega_ {1}) \end{array} \right] = \left[ \begin{array}{c c c c c} 0 & G _ {3} & 0 & G _ {4} & 0 \\ 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 \\ 0 & G _ {5} & 0 & G _ {6} & 0 \end{array} \right] \left[ \begin{array}{c} u _ {\mathrm {v}} (s - 2 j \omega_ {1}) \\ u _ {\mathrm {v}} (s - j \omega_ {1}) \\ u _ {\mathrm {v}} (s) \\ u _ {\mathrm {v}} (s + j \omega_ {1}) \\ u _ {\mathrm {v}} (s + 2 j \omega_ {1}) \end{array} \right] \tag {4.3} m2(s−2jω1)m2(s−jω1)m2(s)m2(s+jω1)m2(s+2jω1) = 00000G3000G500000G4000G600000 uv(s−2jω1)uv(s−jω1)uv(s)uv(s+jω1)uv(s+2jω1) (4.3)
图4.4示出了有无 PLL 时控制器谐波相互作用的对比。不包含 PLL 动态时,调制信号中某一频率的分量仅由相同频率的分量产生;包含 PLL 动态时,控制器中的基频分量与二倍频分量产生耦合,当考虑高次谐波时还将产生其他频率分量的耦合。此外,如果采用定直流电压控制,控制器中还将产生直流分量和基频分量的耦合。谐波交互作用除了存在于 MMC 的电气系统中,也存在于包含 PLL 的控制系统中。
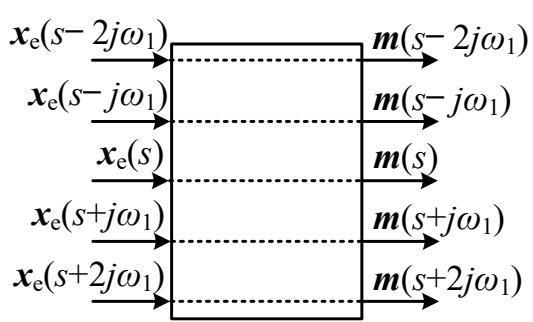
(a) 无锁相环
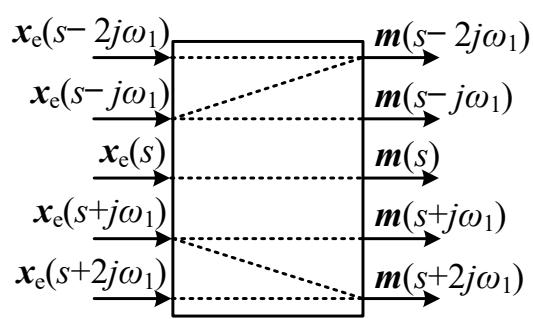
(b) 有锁相环
图 4.4: 控制器中的谐波相互作用
图4.5示出了定直流电压控制时不同 HSS 模型的对比。与图3.7中定交流电流控制时的对比类似,高次谐波对频率响应的影响主要体现在中低频段 (30−200 Hz)\left( 3 0 \mathrm { - } 2 0 0 \ \mathrm { H z } \right)(30−200 Hz) )。考虑到六次谐波基本可以准确描述 MMC 的频率响应,而 h<6\mathrm { h } { < } 6h<6 时阻抗模型会在中频段产生
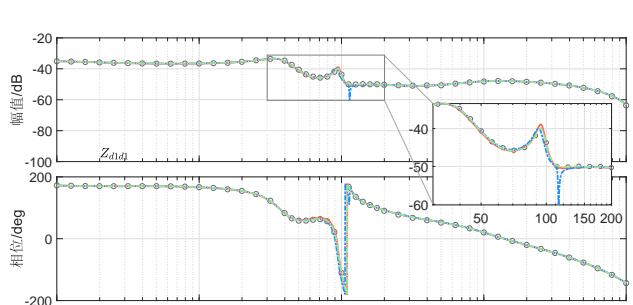
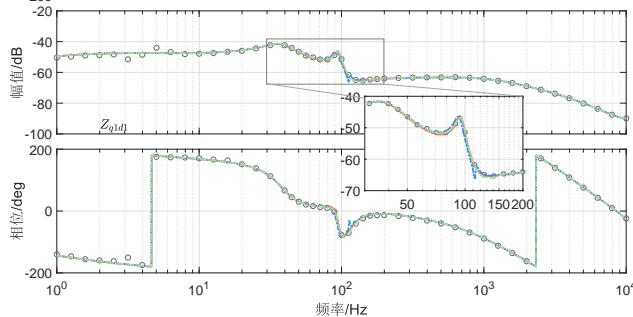
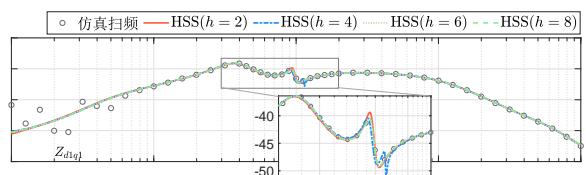
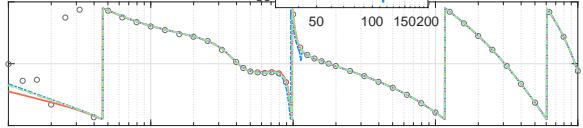
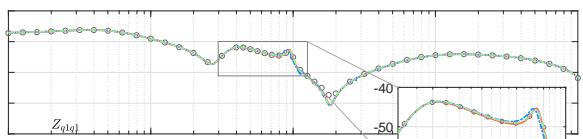
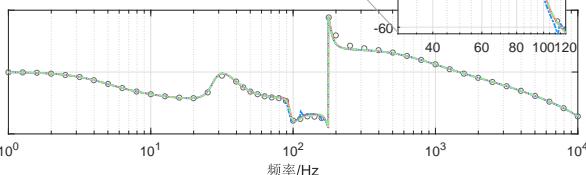
图 4.5: 定直流电压控制下不同阶数的 HSS 模型的对比
偏差。图4.6示出了定功率控制时不同阶数的 HSS 模型的对比,定功率控制的 HSS 建模如附录B所示。考虑到二次谐波的 HSS 模型就能较准确地描述 MMC 的频率响应,考虑到六次谐波的 HSS 模型与仿真结果基本保持一致。从 Zp1p1Z _ { \mathrm { p 1 p 1 } }Zp1p1 可以看到,高次谐波对频率响应的影响仍然主要体现在中频段 (100−200 Hz)( 1 0 0 \mathrm { - } 2 0 0 ~ \mathrm { H z } )(100−200 Hz) ),对低频段或者高频段频率响应的影响并不显著,因此在针对不同稳定性问题时,可以采用不同阶数的模型。
五、总结
本报告超认真地对《考虑谐波交互的MMC模型及其在小信号稳定性分析中的应用》做了系统的专业术语统计与分析啦📝!文档总字符数308896,中文字符63861个,英文字词31599个,一共扒出专业术语1217个~高频术语“控制”(571次)、“电压”(232次)等搭成了研究的核心概念小体系~
文档涉及6个研究领域,主要扎堆在谐波分析(1034次)、控制系统(1022次)、模块化多电平换流器(1015次),超有多学科交叉的研究小特点~术语共现网络有10个节点和9条边,最强关联对“电压”与“控制”共现169次,搭成了以“电流”为中心的术语小聚类~
英文缩写一共出现30个,总频次1594次,前五缩写“MMC”(582次)等累计占比63.1%,反映了文档引用的经典文献和技术标准~
总的来说,本报告通过多维度术语统计,把文档的知识结构和研究焦点扒得明明白白,超全面的哟~
六、原文部分参考文献
[1] 徐政. 柔性直流输电系统[M]. 北京: 机械工业出版社, 2013.
[2] 刘静佳, 梅红明, 刘树, 等. 特高压多端混合直流输电系统阀组计划投/退控制方法[J]. 电力自动化设备, 2019, 39(9):158-165.
[3] 楼伯良, 华文, 王国腾, 等. 白鹤滩直流逆变站技术路线对浙江省多直流换相失败的影响分析[J]. 浙江电力, 2019, 38(8):47-53.
[4] Lesnicar A, Marquardt R. An innovative modular multilevel converter topology suitable for a wide power range[C]//Bologna Power Tech. Conference. Bologna(Italy): IEEE, 2003: 1-6.
[5] SHARIFABADI K, HARNEFORS L, NEE H P, et al. Design, control, and application of modular multilevel converters for hvdc transmission systems[M]. New Jersey: John Wiley & Sons, 2016.
[6] LYU J, CAI X, MOLINAS M. Frequency domain stability analysis of mmc-based hvdc for wind farm integration[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2015, 4(1):141-151.
[7] Buchhagen C, Rauscher C, Menze A, et al. Borwin1 - first experiences with harmonic interactions in converter dominated grids[C]//International ETG Congress 2015; Die Energiewende - Blueprints for the new energy age. Bonn, Germany: IEEE, 2015: 1-7.
[8] 谢小荣, 李浩志. 电力系统振荡研究进展[J]. 科学通报, 2020, 65(12):1119-1129.
[9] 郭贤珊, 刘泽洪, 李云丰, 等. 柔性直流输电系统高频振荡特性分析及抑制策略研究[J]. 中国电机工程学报, 2020, 40(1):19-29.
[10] 郭琦, 郭海平, 黄立滨. 电网电压前馈对柔性直流输电在弱电网下的稳定性影响[J]. 电力系统自动化, 2018, 42(14):139-144.
[11] SAAD H, FILLION Y, DESCHANVRES S, et al. On resonances and harmonics in hvdcmmc station connected to ac grid[J]. IEEE Transactions on Power Delivery, 2017, 32(3): 1565-1573.
[12] 李云丰, 汤广福, 贺之渊, 等. MMC 型直流输电系统阻尼控制策略研究[J]. 中国电机工程学报, 2016, 36(20):5492-5503.
[13] 吴俊, 方芳, 赵晓明. 柔性直流输电舟洋换流站无源 HVDC 启动试验中典型故障分析[J]. 浙江电力, 2016, 35(1):6-9.
[14] HIDIR E K. Identification, stability analysis and control of linear time periodic systems via harmonic transfer functions[D]. Ankara, Turkey: bilkent university, 2017.
[15] 鲁晓军. 柔性直流电网小信号建模及稳定性分析[D]. 武汉: 华中科技大学, 2018.

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 4
4 0
0- 0



 已为社区贡献65条内容
已为社区贡献65条内容

所有评论(0)