基于高频方波电压注入零低速IPMSM无感控制算法的Simulink仿真探索
基于高频方波电压注入零低速IPMSM无感控制算法simulink仿真模型 ①在估计的d轴注入高频方波电压来估计转子位置,具有较高的稳态精度和动态性能。 该仿真调试效果不错,曾应用到实际电机中去。 ②阐述了 IPMSM 的 MTPA 控制原理,并在此基础上研究了 IPMSM 基于 高频方波电压信号注入法的无位置传感器控制算法。 仿真结果表明基于高频方波 电压信号注入的无位置传感器控制方法具有不错的动静态性能
在电机控制领域,零低速下的无位置传感器控制一直是个颇具挑战的课题。今天就来聊聊基于高频方波电压注入零低速IPMSM(内置式永磁同步电机)无感控制算法的Simulink仿真模型,这个模型可是有着不错的实际应用价值哦。
一、高频方波电压注入估计转子位置
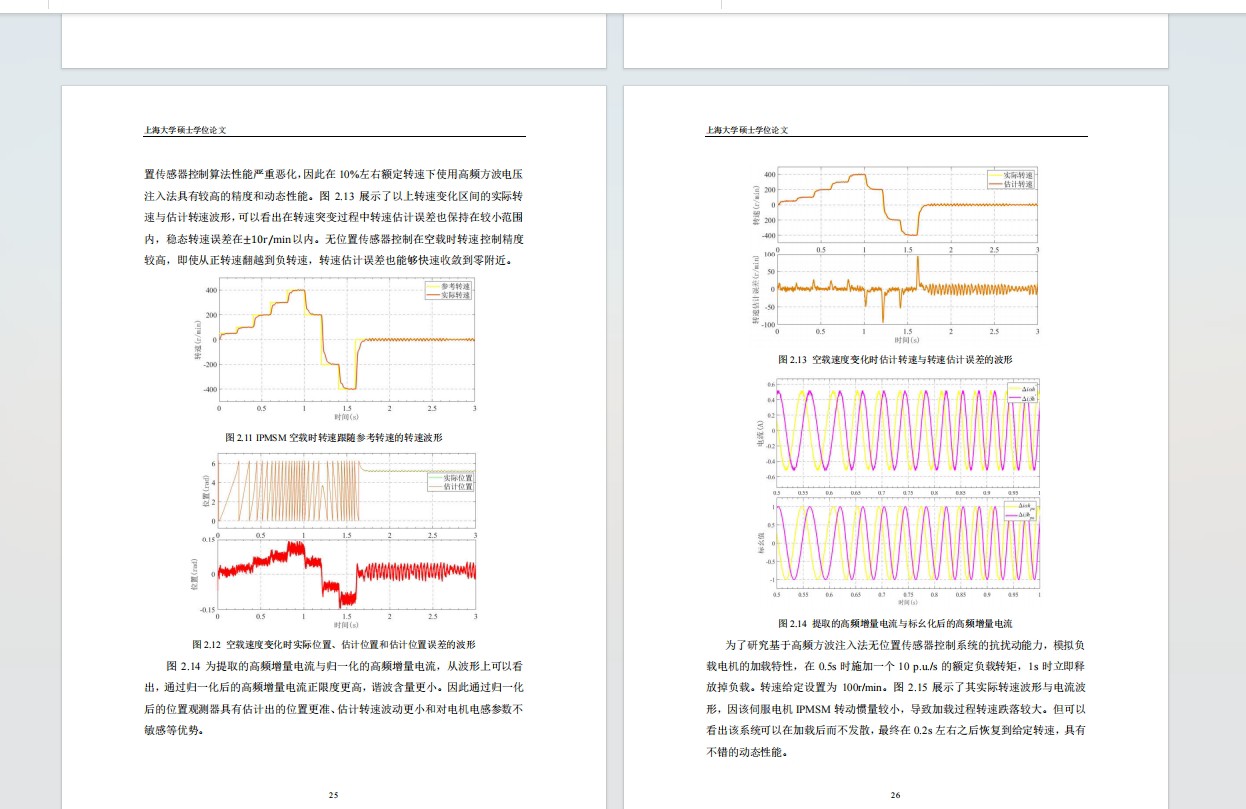
我们知道,对于IPMSM在零低速运行时,传统的基于反电动势的位置估计方法不再适用。这里采用在估计的d轴注入高频方波电压来估计转子位置,这一方法展现出了较高的稳态精度和动态性能。
假设我们在Simulink中搭建相关模块,首先得有一个高频方波电压信号生成模块。以Matlab代码简单示意生成高频方波电压信号:
% 设定高频方波的参数
fs = 10000; % 采样频率
T = 1/fs; % 采样周期
t = 0:T:1; % 时间向量
A = 1; % 幅值
f = 1000; % 高频方波频率
square_wave = A * square(2*pi*f*t);上述代码通过square函数生成了一个幅值为1,频率为1000Hz的高频方波电压信号。在Simulink中,就可以类似地设置相关参数生成这样的高频方波信号。
将这个高频方波电压注入到估计的d轴后,电机内部会产生与转子位置相关的高频电流响应。通过对这个高频电流的处理和分析,就能估计出转子的位置。
二、IPMSM的MTPA控制原理及无感控制算法
- MTPA控制原理
MTPA(最大转矩电流比)控制的目标是在给定的电流幅值下,产生最大的电磁转矩,从而提高电机的效率。简单来说,就是合理分配d轴和q轴电流,让电机在运行时达到最佳的转矩输出与电流消耗比。
基于高频方波电压注入零低速IPMSM无感控制算法simulink仿真模型 ①在估计的d轴注入高频方波电压来估计转子位置,具有较高的稳态精度和动态性能。 该仿真调试效果不错,曾应用到实际电机中去。 ②阐述了 IPMSM 的 MTPA 控制原理,并在此基础上研究了 IPMSM 基于 高频方波电压信号注入法的无位置传感器控制算法。 仿真结果表明基于高频方波 电压信号注入的无位置传感器控制方法具有不错的动静态性能
在Simulink模型中,MTPA控制模块会根据电机的参数和给定的转矩指令,计算出最优的d轴和q轴电流指令。
- 基于高频方波电压信号注入法的无位置传感器控制算法
在阐述完MTPA控制原理后,基于高频方波电压信号注入法的无位置传感器控制算法就有了更好的理解基础。该算法利用注入的高频方波电压,结合电机的数学模型,通过一系列复杂的信号处理步骤,来估计转子位置和速度。
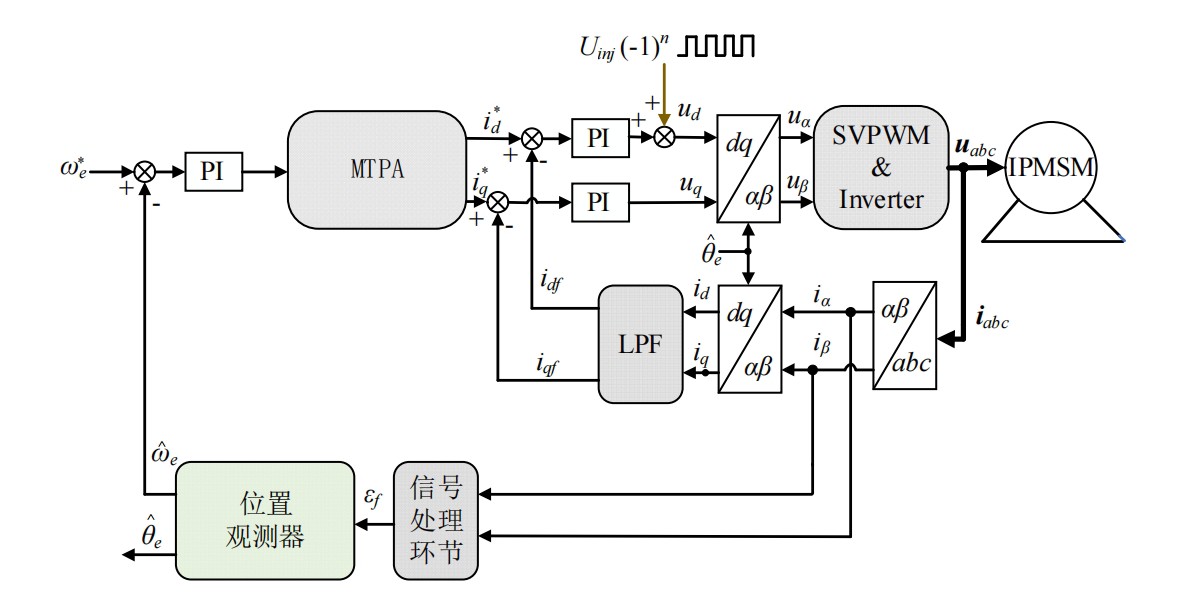
在Simulink仿真模型中,各个模块相互协作。高频方波电压注入模块将高频信号注入到电机模型中,然后通过电流检测模块采集电机电流,再经过信号处理模块对采集到的电流信号进行解调、滤波等操作,最终估计出转子位置和速度,反馈给控制系统,实现无位置传感器控制。
三、仿真结果与实际应用
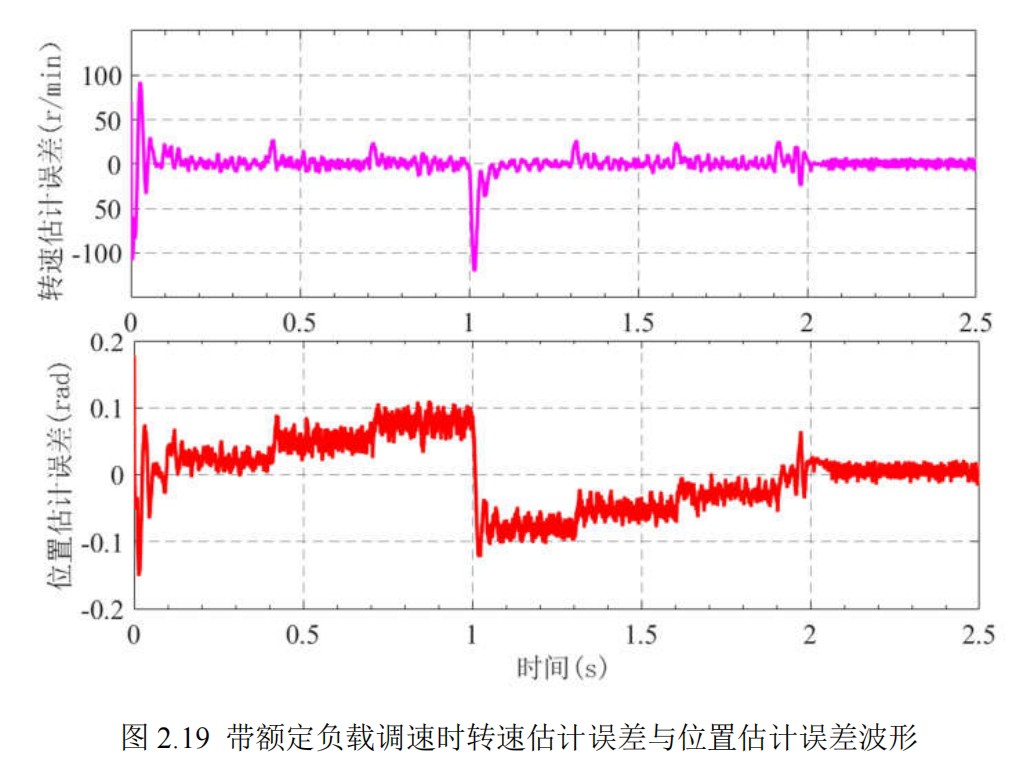
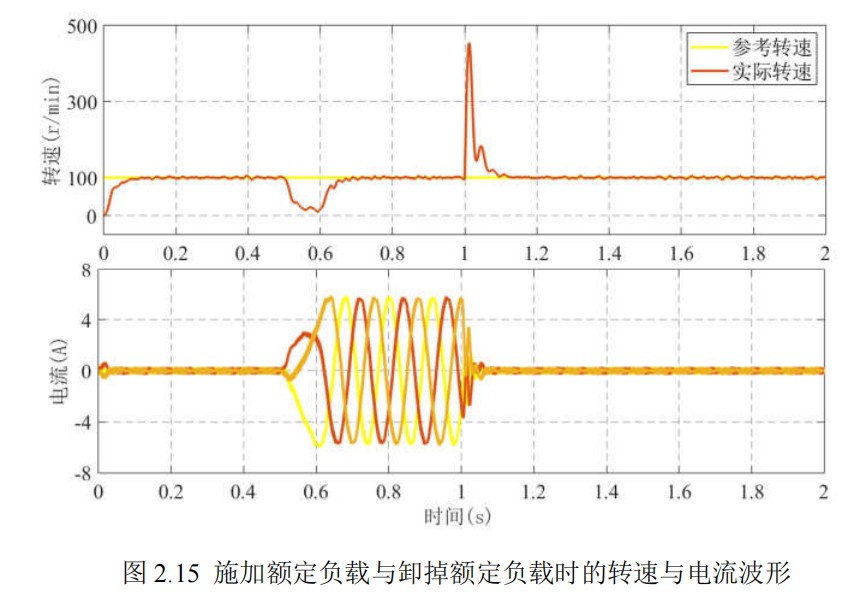
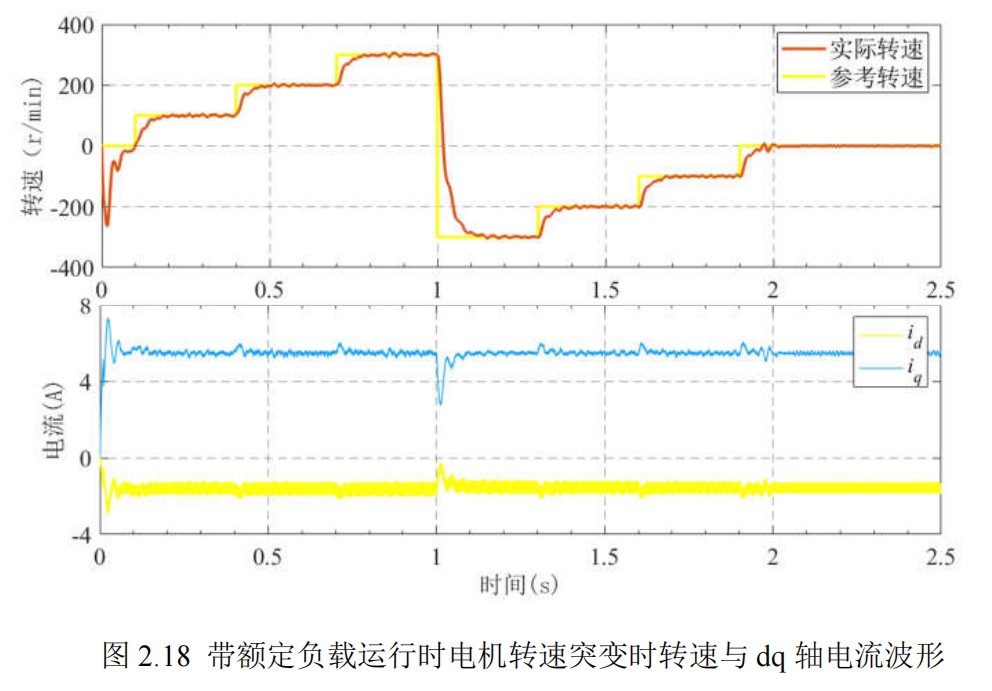
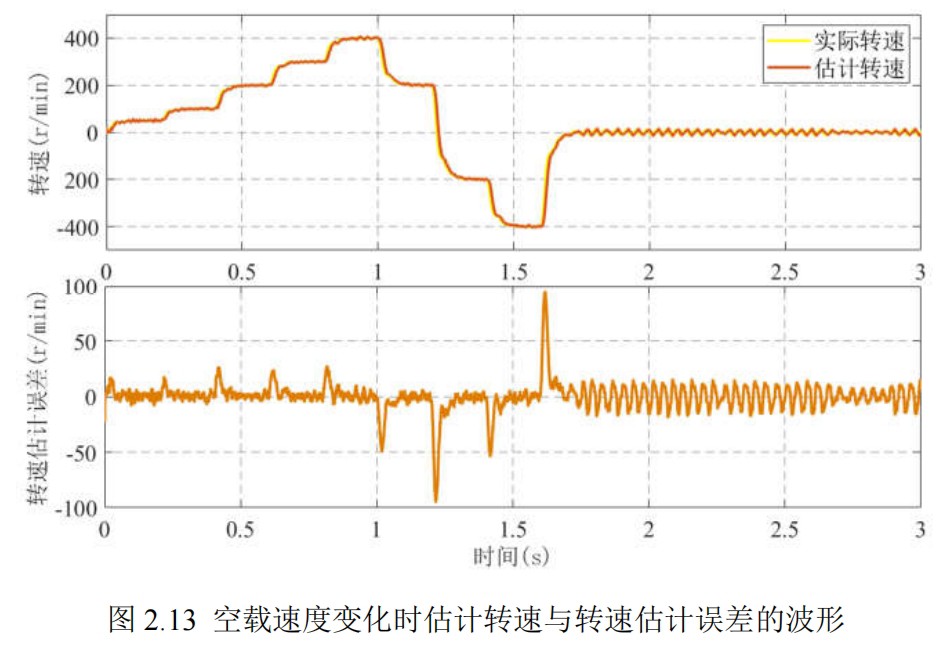
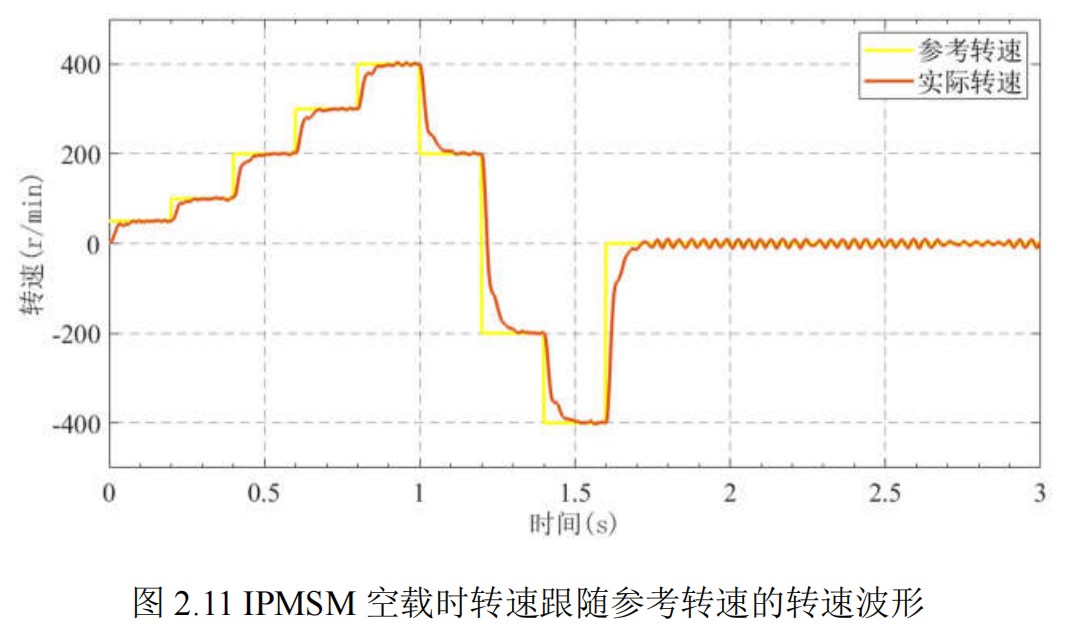
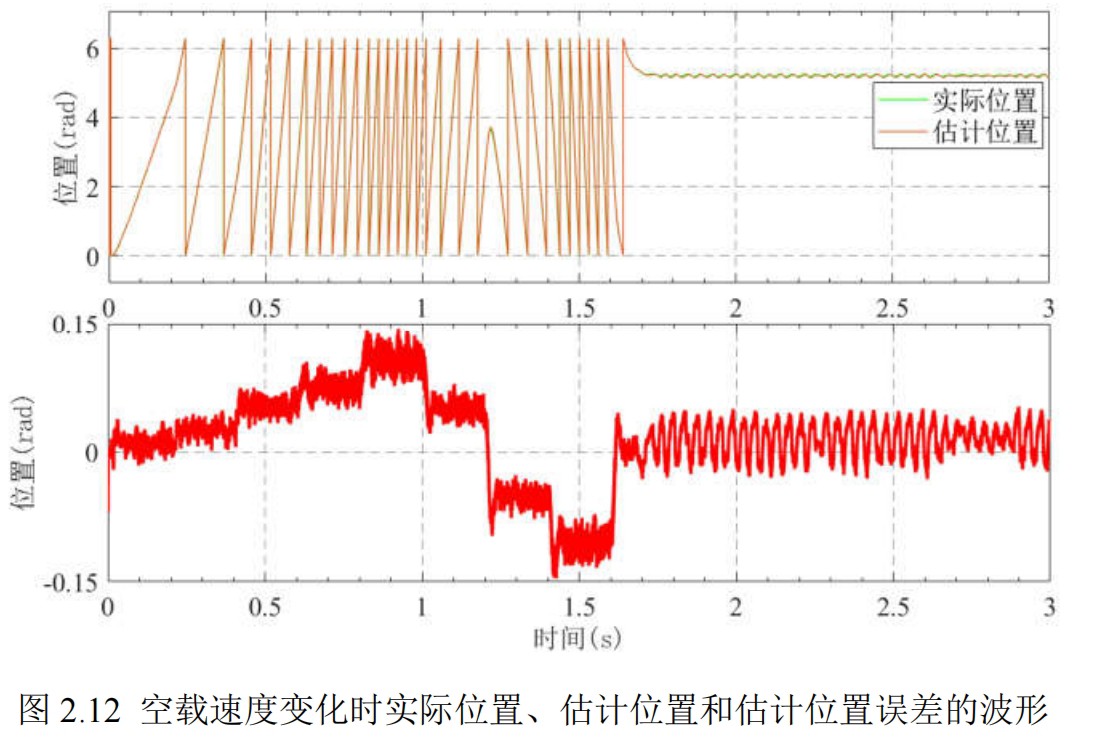
通过Simulink仿真调试,这个模型取得了不错的效果。仿真结果表明基于高频方波电压信号注入的无位置传感器控制方法在动静态性能方面都表现良好。在动态过程中,电机能够快速响应转矩指令的变化,而在稳态运行时,电机的转速波动较小,位置估计精度较高。
而且,这个仿真模型可不只是停留在理论层面,它还被应用到了实际电机中。实际应用的成功进一步验证了该模型和算法的有效性和可靠性。
总之,基于高频方波电压注入零低速IPMSM无感控制算法的Simulink仿真模型,为零低速下IPMSM的无位置传感器控制提供了一种可行且高效的解决方案,无论是从理论研究还是实际应用角度,都有着重要的意义。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 1
1 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)