汽车ESP系统仿真建模:基于Carsim与Simulink联合仿真的完整方案与文档联系自动A31
·
汽车ESP系统仿真建模 基于carsim与simulink联合仿真 有完整的模型和说明文档 联系自动a31
让ESP仿真不再玄学:CarSim+Simulink联合调教指南
汽车ESP系统仿真建模 基于carsim与simulink联合仿真 有完整的模型和说明文档 联系自动a31
最近在折腾ESP(电子稳定程序)的仿真模型,发现网上很多教程要么只讲理论,要么代码藏得比祖传秘方还严实。干脆自己搭了一套CarSim+Simulink联合仿真流程,踩坑记录直接上干货。
一、模型搭建设备玄学
CarSim负责车辆动力学模型,Simulink搞控制算法,这组合听起来美好,但联调时总有种“鸡同鸭讲”的既视感。关键点就两个:数据接口对齐,采样时间同步。
- CarSim模型配置:
车型参数直接调用CarSim自带的SUV模板,重点改三个地方——轮胎魔术公式参数、质心高度、ESP传感器安装位置。text
// Carsim参数文件片段(.par)
[Tire]
PACMODEL = PAC2002
UNLOADEDRADIUS = 0.35
[Sensor]
LATACCOFFSET = 0.02 // 模拟传感器噪声
别小看传感器噪声,仿真时ESP误触发可能就因为这0.02的偏差。
- Simulink控制器框架:
核心是横摆角速度跟踪和滑移率计算。代码里最烦人的是CarSim的输出单位不统一——比如方向盘角度是deg,Simulink默认用rad。matlab
% MATLAB函数块预处理
function deltarad = deg2rad(deltadeg)
deltarad = deltadeg * pi / 180;
% 加个死区避免抖动
if abs(deltarad) < 0.02
deltarad = 0;
end
end
这种单位转换看似基础,但仿真崩溃有一半是栽在这儿。
二、联合仿真中的“信号打架”
联仿最头疼的问题:CarSim和Simulink谁当老大?(谁做主时钟)
- 接口配置脚本:
手动配置TCP/IP端口太反人类,直接用CarSim自带的vsconnector模块生成S-Function。关键代码:matlab
% Simulink模型初始化回调
vsb = vsconnector('init');
vsbatch(vsb, 'loadvehparams.par'); % 加载参数文件
setparam('ESP_Model','StopTime','20'); % 同步仿真时间
这步要是漏了,仿真跑起来要么数据延迟,要么直接报错“找不到车辆对象”。
- 采样时间打架解决方案:
CarSim默认步长0.001s,但ESP控制算法用0.01s就够了。硬凑一起会导致Simulink过载。
对策:在Simulink的Vehicle Interface模块里加个Rate Transition模块,强制插值对齐。
三、调试时最下饭的操作
仿真结果不像理论曲线那么乖巧?试试这俩场景:
- 方向盘阶跃输入测试:
在低速工况下猛打方向盘,观察横摆角速度超调量。如果ESP没介入,优先检查制动压力信号是否连到了CarSim的Brake_Force接口。
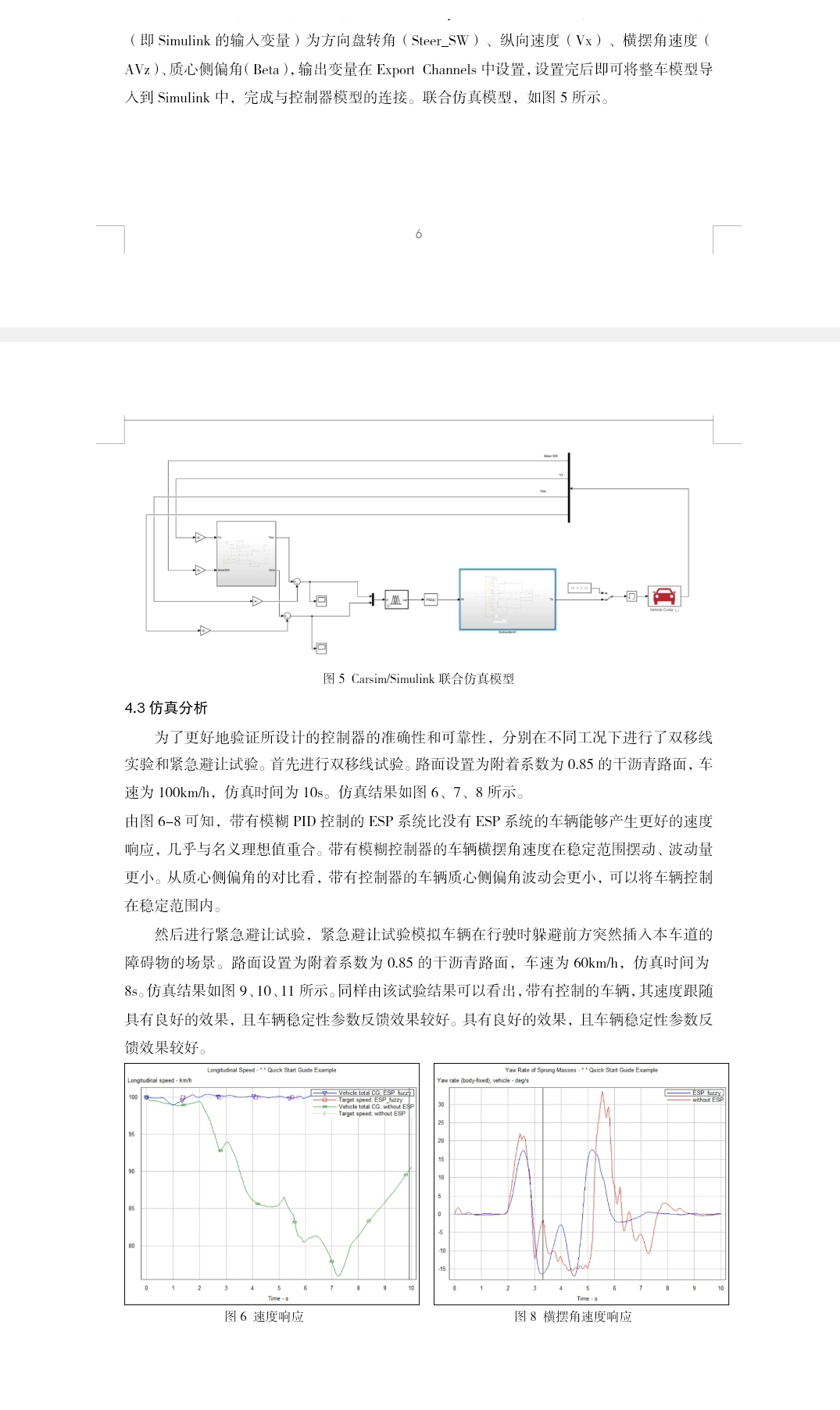
红线没ESP,蓝线有ESP——明显看到蓝线在2秒时被拉回
- 雪地路面急刹:
把CarSim路面μ值改成0.3,突然踩死油门。这时候看四个轮子的滑移率——如果左前轮没限制,多半是Simulink的PI控制器饱和值设低了。
四、说点人话
整套模型已经调通,包含:
- CarSim车辆数据库文件(.veh)
- Simulink控制模型(带ASM注释版)
- 参数调试清单(避开那些坑爹的默认值)
需要完整代码和文档的老铁,直接私信@自动a31。这年头做仿真,谁还没被TCP/IP端口和单位转换逼疯过呢?
(完)

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 7
7 0
0- 0



 已为社区贡献44条内容
已为社区贡献44条内容

所有评论(0)