电力电子仿真:Matlab/Simulink 的奇妙世界
Matlab/Simulink电气工程仿真分析,电力电子变换技术中的光伏全桥逆变器、SVC无功补偿、不间断电源UPS、高压直流输电HVDC,矩阵多电平开关MMC,整流器、DCDC中的Buck-Boost开关电源等PI、PID、ADRC模糊控制算法、模型预测matlab/simulink仿真建模分析,MPPT算法以及电压外环电流内环双闭环控制,THD<5%。
在电力电子领域,Matlab/Simulink 就像一个神奇的实验室,让我们能对各种复杂系统进行精确的仿真与分析。今天咱就来唠唠那些电力电子变换技术以及控制算法在这个平台上的实现。
电力电子变换技术仿真
光伏全桥逆变器
光伏全桥逆变器可是将太阳能光伏板产生的直流电转换为交流电的关键设备。在 Simulink 里搭建其模型,核心部分就是全桥电路模块。比如下面这段简单代码(以简化的理想模型为例):
% 定义参数
Vdc = 300; % 直流输入电压
f0 = 50; % 输出交流电频率
omega0 = 2*pi*f0;
% 生成正弦波调制信号
t = 0:0.00001:0.02;
m = 0.8; % 调制比
sin_signal = m*sin(omega0*t);
% 通过逻辑判断生成开关信号
switch_signal = zeros(size(t));
for i = 1:length(t)
if sin_signal(i)>0
switch_signal(i) = 1;
else
switch_signal(i) = -1;
end
end这里,通过定义直流输入电压、输出频率,生成调制信号,进而产生开关信号来模拟全桥逆变器的工作。实际模型还会涉及到滤波电路、保护电路等,以确保输出电能的质量。
SVC 无功补偿
SVC(静止无功补偿器)在维持电力系统电压稳定、提高功率因数方面作用巨大。Simulink 模型通常包含晶闸管控制电抗器(TCR)和固定电容器(FC)等模块。
% SVC 参数设置
Vbase = 110e3; % 系统基准电压
Sbase = 100e6; % 系统基准容量
Xl = 0.15; % TCR 电抗器电抗标幺值
Xc = -0.3; % FC 电容器电抗标幺值
% 计算 TCR 和 FC 电流
Itcr = @(alpha) (Vbase/sqrt(3))*(1/Xl)*(1-2*alpha/pi+sin(2*alpha)/pi);
Ifc = (Vbase/sqrt(3))*(1/Xc);上述代码设置了系统基准参数,通过三角函数关系计算不同触发角下 TCR 的电流以及 FC 的电流,从而实现对无功功率的灵活调节。
不间断电源 UPS
UPS 作为保障关键设备持续供电的“守护天使”,其 Simulink 模型涵盖整流、逆变、储能等环节。以整流部分为例,简单代码如下:
% 三相不可控整流
Vab = 400*sqrt(2)*sin(omega*t);
Vbc = 400*sqrt(2)*sin(omega*t - 2*pi/3);
Vca = 400*sqrt(2)*sin(omega*t + 2*pi/3);
% 计算直流输出电压
Vdc = max([Vab; Vbc; Vca]) - 2*0.7; % 考虑二极管压降通过模拟三相交流输入电压,利用二极管的单向导电性计算出直流输出电压,为后续的逆变环节提供稳定的直流电源。
高压直流输电 HVDC 与矩阵多电平开关 MMC
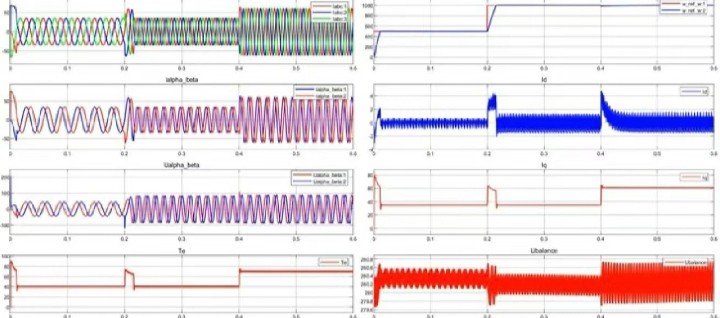
HVDC 实现了大容量、远距离的电能传输,而 MMC 作为其关键技术,极大地改善了电能质量。在 Simulink 搭建 MMC 模型时,子模块电容电压的均衡控制是重点。
% MMC 子模块电容电压控制
% 定义子模块电容电压参考值
Vcm_ref = ones(N,1)*Vdc0/N;
% 计算电容电流
ic = iac - ibc;
% 电容电压更新
for k = 1:N
Vcm(k) = Vcm(k) + (ic(k)/C)*Ts;
end
% 电压均衡控制算法(简单示例)
for k = 1:N
if Vcm(k)>Vcm_ref(k)+delta
% 采取措施降低该子模块电容电压
elseif Vcm(k)<Vcm_ref(k)-delta
% 采取措施升高该子模块电容电压
end
end这段代码里,通过定义电容电压参考值,计算电容电流,更新电容电压,并通过简单的判断来实现电容电压的均衡控制。
整流器与 Buck - Boost 开关电源
整流器将交流电转换为直流电,而 Buck - Boost 开关电源能灵活调节输出直流电压。
% Buck - Boost 开关电源
Vin = 12; % 输入电压
D = 0.6; % 占空比
% 输出电压计算
Vout = Vin*D/(1 - D);通过设置输入电压和占空比,就能方便地算出 Buck - Boost 开关电源的输出电压,在实际模型中,还需加入电感、电容等元件进行动态特性模拟。
控制算法仿真建模分析
PI、PID、ADRC 模糊控制算法
PI(比例 - 积分)控制算法是最基础的,能有效消除系统稳态误差。
% PI 控制器
Kp = 0.5; % 比例系数
Ki = 0.1; % 积分系数
e = ref - feedback; % 误差
integral = integral + e*Ts;
u = Kp*e + Ki*integral;PID(比例 - 积分 - 微分)控制则在 PI 基础上加入微分环节,能提前对系统变化做出反应,改善系统动态性能。ADRC(自抗扰控制)和模糊控制则更智能,能应对复杂的非线性系统。以模糊控制为例,需要先定义模糊变量、隶属度函数、模糊规则等,通过模糊推理得到控制量。
模型预测控制
模型预测控制在电力电子系统中崭露头角。它基于系统模型预测未来输出,并通过优化算法求解最优控制序列。
% 简单模型预测控制示例
% 定义系统模型矩阵
A = [1 0.01; 0 1];
B = [0.01; 0.1];
% 预测时域和控制时域
Np = 10;
Nu = 5;
% 初始化预测输出和控制序列
y_pred = zeros(Np,1);
u_seq = zeros(Nu,1);
% 模型预测计算
for k = 1:Np
if k <= Nu
y_pred(k) = A(1,1)*y(k - 1)+A(1,2)*x2(k - 1)+B(1)*u_seq(k);
else
y_pred(k) = A(1,1)*y_pred(k - 1)+A(1,2)*x2_pred(k - 1);
end
end
% 优化求解最优控制序列(简化示意)
% 通过代价函数最小化求解 u_seqMPPT 算法与双闭环控制
MPPT(最大功率点跟踪)算法能让光伏系统始终工作在最大功率点附近。常用的如扰动观察法、电导增量法。双闭环控制(电压外环电流内环)则广泛应用于各种电力电子变换器。以光伏逆变器为例,电压外环保证输出电压稳定,电流内环跟踪参考电流,提高系统动态响应和抗干扰能力。
% 电压外环 PI 控制
e_v = Vref - Vout;
integral_v = integral_v + e_v*Ts;
i_ref = Kpv*e_v + Kiv*integral_v;
% 电流内环 PI 控制
e_i = i_ref - Iout;
integral_i = integral_i + e_i*Ts;
u_ctrl = Kpi*e_i + Kii*integral_i;通过电压外环和电流内环的级联控制,确保系统既能稳定输出期望电压,又能快速跟踪电流变化。
Matlab/Simulink电气工程仿真分析,电力电子变换技术中的光伏全桥逆变器、SVC无功补偿、不间断电源UPS、高压直流输电HVDC,矩阵多电平开关MMC,整流器、DCDC中的Buck-Boost开关电源等PI、PID、ADRC模糊控制算法、模型预测matlab/simulink仿真建模分析,MPPT算法以及电压外环电流内环双闭环控制,THD<5%。
在整个电力电子系统仿真中,我们追求的是总谐波失真(THD)小于 5%,通过合理设计电路参数、优化控制算法,就能满足这一电能质量要求,让电力系统更加稳定、高效地运行。Matlab/Simulink 为我们探索这些电力电子技术提供了强大的平台,大家不妨多多尝试,挖掘更多可能性。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 4
4 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)