双馈风机在系统一次调频中频率二次跌落问题探究
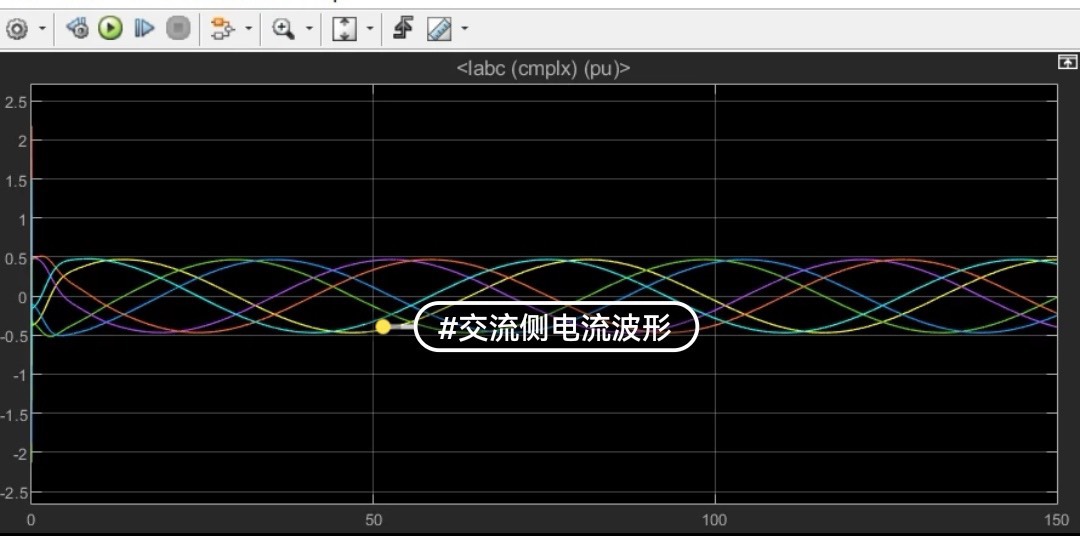
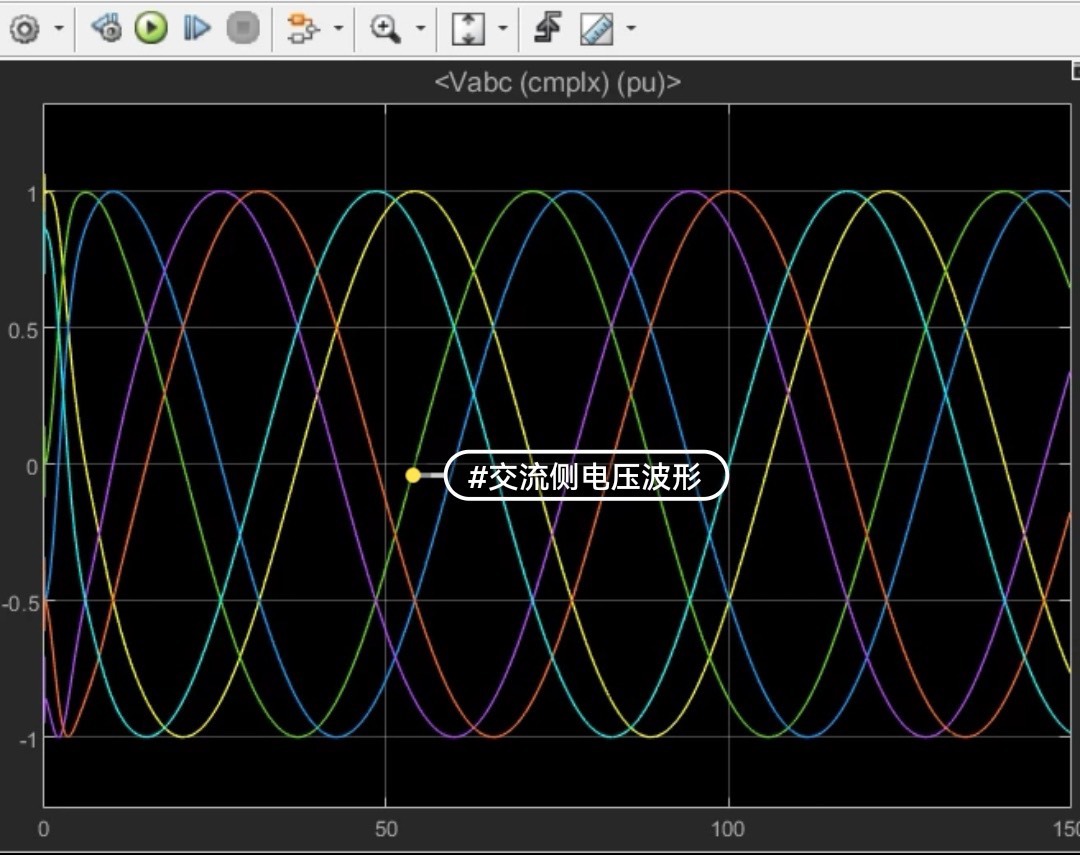
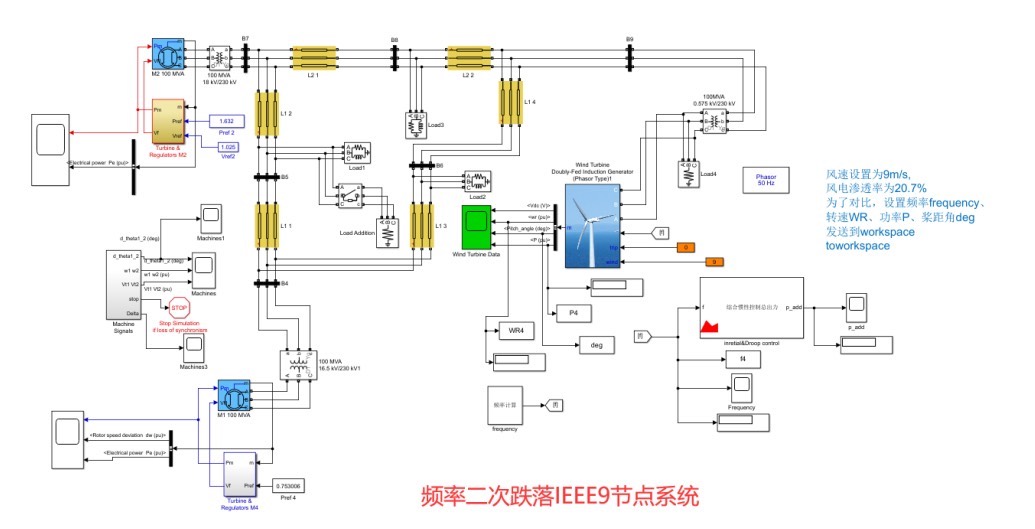
双馈风机(永磁同步风机)虚拟惯性控制+下垂控制参与系统一次调频的Matlab/Simulink模型,调频结束后转速回复,造成频率二次跌落SFD。 系统为三机九节点模型(可更换为四机两区域,十机39节点,IEEE39节点,IEEE11节点),所有参数已调好且可调,可直接运行,风电渗透率可调 风机采用虚拟惯性+下垂控制,含有转速回复模块,在系统频率跌落时释放转子动能提供有功支撑,参与电网的一次调频,在调频过程结束后,仿真时间30s时风机切换至mppt控制(退出时间可任意调节),功率骤降导致频率的二次跌落,
在电力系统研究领域,双馈风机(永磁同步风机)参与一次调频的相关课题一直备受关注。今天就来聊聊基于 Matlab/Simulink 搭建的双馈风机虚拟惯性控制 + 下垂控制参与系统一次调频模型中出现的频率二次跌落(SFD)现象。
一、模型基本情况
本次研究基于三机九节点模型展开,当然,为了更全面研究不同规模系统下的特性,模型还可轻松切换为四机两区域、十机 39 节点、IEEE39 节点以及 IEEE11 节点。并且所有参数不仅已精心调好,还具备可调节性,能够适应不同研究需求,上手即可直接运行。另外,风电渗透率也在可调节范围内,这对于研究不同风电接入比例对系统的影响提供了便利。
二、风机控制策略
风机采用虚拟惯性 + 下垂控制,这种控制策略在系统频率跌落时相当关键。它能够利用转速回复模块,释放转子动能,为系统提供有功支撑,从而积极参与电网的一次调频。
虚拟惯性控制代码示例
% 虚拟惯性控制部分代码示例
function [P_add] = virtual_inertia_control(f, f_nom, H, P_rated)
% f 当前频率
% f_nom 额定频率
% H 惯性时间常数
% P_rated 风机额定功率
df = f_nom - f;
P_add = 2 * H * df / (f_nom * dt); % dt 为仿真步长,假设已在主程序中定义
P_add = min(max(P_add, -P_rated), P_rated); % 限制附加功率在额定功率范围内
end这段代码通过当前频率与额定频率的差值,结合惯性时间常数和额定功率,计算出虚拟惯性控制下风机需要额外提供的有功功率。并且通过 min 和 max 函数,将附加功率限制在额定功率范围内,防止风机输出功率超出安全范围。
下垂控制代码示例
% 下垂控制部分代码示例
function [P_add] = droop_control(f, f_nom, R, P_rated)
% f 当前频率
% f_nom 额定频率
% R 下垂系数
% P_rated 风机额定功率
df = f_nom - f;
P_add = df / R;
P_add = min(max(P_add, -P_rated), P_rated); % 限制附加功率在额定功率范围内
end下垂控制代码同样基于频率偏差进行计算,通过下垂系数得到需要附加的有功功率,同样限制在额定功率范围内。
三、调频过程及频率二次跌落
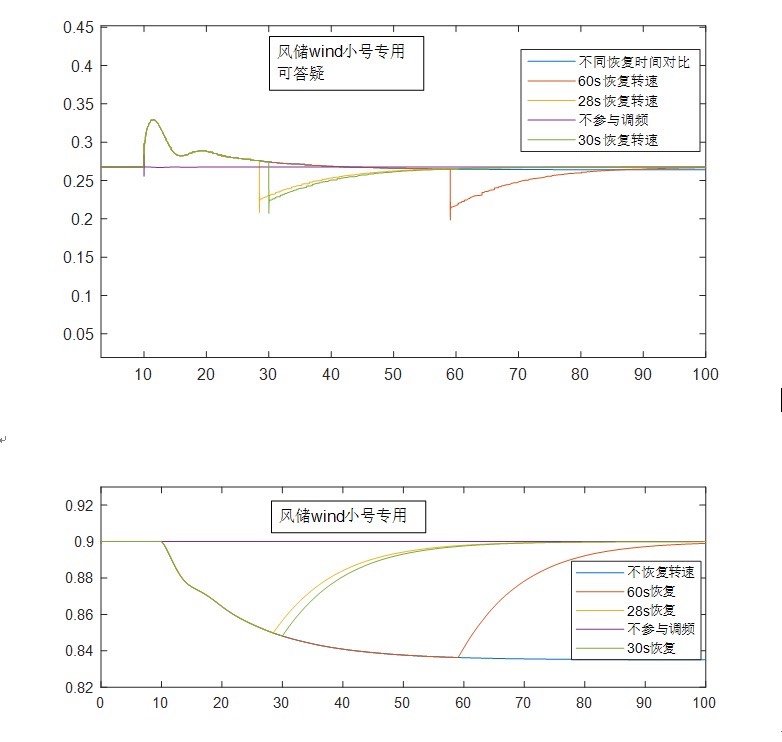
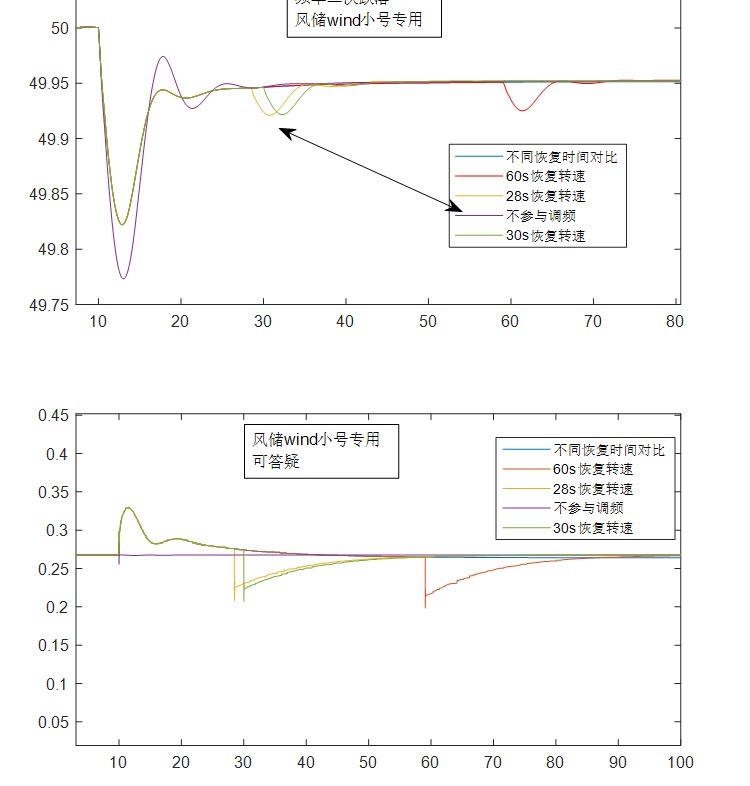
在系统频率跌落时,风机迅速响应,通过虚拟惯性和下垂控制释放转子动能提供有功支撑。在调频过程结束后,当仿真时间达到 30s 时(退出时间可任意调节),风机切换至最大功率点跟踪(MPPT)控制。然而,这一过程却导致了功率骤降,进而引发频率的二次跌落。
转速回复与频率二次跌落分析
风机在调频过程中,转子转速会因释放动能而降低。当调频结束进入转速回复阶段,由于风机要恢复到初始的最佳转速以实现 MPPT 控制,这一过程中会消耗系统的有功功率,使得风机输出功率骤降。就像下面这个简单的示意代码:
% 转速回复及功率变化示意代码
if t >= 30 % 假设 30s 进入转速回复阶段
% 转速回复相关计算,假设存在一个函数计算转速回复所需功率
P_speed_recovery = calculate_speed_recovery_power();
P_wind = P_wind - P_speed_recovery; % 风机输出功率因转速回复降低
% 这里简化处理,实际还需考虑系统其他元件对功率变化的响应
% 功率骤降导致频率二次跌落相关计算
f = calculate_new_frequency(P_wind); % 计算因功率变化后的新频率
end这种功率骤降打破了系统原有的功率平衡,使得系统频率再次跌落,这就是我们所说的频率二次跌落现象。
双馈风机(永磁同步风机)虚拟惯性控制+下垂控制参与系统一次调频的Matlab/Simulink模型,调频结束后转速回复,造成频率二次跌落SFD。 系统为三机九节点模型(可更换为四机两区域,十机39节点,IEEE39节点,IEEE11节点),所有参数已调好且可调,可直接运行,风电渗透率可调 风机采用虚拟惯性+下垂控制,含有转速回复模块,在系统频率跌落时释放转子动能提供有功支撑,参与电网的一次调频,在调频过程结束后,仿真时间30s时风机切换至mppt控制(退出时间可任意调节),功率骤降导致频率的二次跌落,
在研究电力系统稳定性时,这种频率二次跌落问题不容忽视。后续可以进一步探究如何优化风机控制策略,例如调整转速回复的速度、优化 MPPT 控制切换逻辑等,来减轻甚至避免频率二次跌落对系统稳定性的影响。希望通过分享这个模型中的现象及分析,能给同样研究相关课题的小伙伴们一些启发和思路。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 6
6 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)