图论算法(二):最短路径四大算法
📝 写在前面
在地图导航、网络路由、任务规划等场景中,最短路径问题无处不在。给定一个图(有向/无向),找到从一个顶点到另一个顶点的最短路径(权值和最小)。今天我们来学习四种经典的最短路径算法,它们各有千秋:
| 算法 | 类型 | 适用场景 | 时间复杂度 | 特点 |
|---|---|---|---|---|
| Dijkstra | 单源 | 非负权图 | O((V+E)logV) | 贪心,效率高 |
| Bellman-Ford | 单源 | 可含负权,检测负环 | O(VE) | 容忍负权,可检测负环 |
| Floyd-Warshall | 多源 | 任意两点 | O(V³) | 动态规划,简洁 |
| SPFA | 单源 | 稀疏图,负权 | 平均O(kE),最坏O(VE) | 队列优化Bellman-Ford |
阅读指南:每个算法包含👇
-
一句话记住核心思想
-
算法可视化:mermaid流程图
-
代码实现:带详细注释
-
LeetCode实战:典型例题+解题代码
一、Dijkstra算法 —— 贪心者的最短路径
🎯 一句话记住
每次选个离起点最近的点,用它去更新邻居,就像水滴扩散。
🤔 核心思想
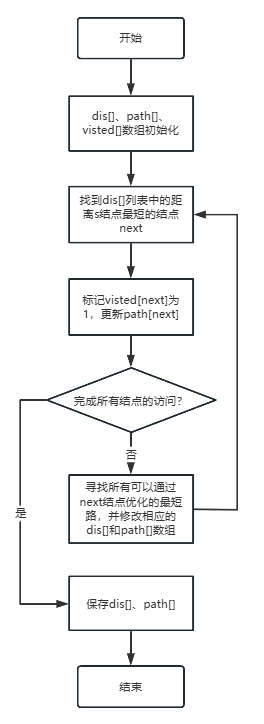
Dijkstra算法适用于所有边权非负的图。它维护一个距离数组 dist,表示从起点到各个顶点的当前最短距离。每次从未确定的顶点中选出 dist 最小的顶点(贪心选择),然后用它去松弛它的邻居。重复V次。
优化:使用优先队列(最小堆)来快速选取最小距离顶点,复杂度 O((V+E)logV)。
📊 Dijkstra流程图
💻 代码实现(邻接表+优先队列)
/**
* Dijkstra算法求单源最短路径
* @param {number} n 顶点数(顶点编号0~n-1)
* @param {number[][]} edges 边集 [u, v, w]
* @param {number} start 起点
* @returns {number[]} 从start到各点的最短距离,不可达为Infinity
*/
function dijkstra(n, edges, start) {
// 构建邻接表
const graph = Array.from({ length: n }, () => []);
for (const [u, v, w] of edges) {
graph[u].push({ to: v, weight: w });
// 如果无向图,还需添加反向边:graph[v].push({to: u, weight: w});
}
const dist = new Array(n).fill(Infinity);
dist[start] = 0;
// 最小堆,按距离排序
const pq = new MinPriorityQueue({ priority: (item) => item.dist });
pq.enqueue({ node: start, dist: 0 });
const visited = new Array(n).fill(false);
while (!pq.isEmpty()) {
const { node: u } = pq.dequeue();
if (visited[u]) continue;
visited[u] = true;
for (const { to: v, weight } of graph[u]) {
const newDist = dist[u] + weight;
if (newDist < dist[v]) {
dist[v] = newDist;
pq.enqueue({ node: v, dist: newDist });
}
}
}
return dist;
}
// 注意:MinPriorityQueue 是LeetCode环境内置的,实际可用堆实现或使用第三方库🏆 LeetCode实战:网络延迟时间
题目描述:有 n 个网络节点,标记为 1 到 n。给你一个列表 times,表示信号经过有向边的传递时间。times[i] = (u, v, w),其中 u 是源节点,v 是目标节点, w 是一个信号从源节点传递到目标节点的时间。现在,从某个节点 k 发出一个信号。需要多久才能使所有节点都收到信号?如果不能使所有节点收到信号,返回 -1。
思路分析:
从节点 k 出发,求到所有节点的最短路径中的最大值。如果存在不可达节点,返回 -1。直接套用 Dijkstra 算法。
解题代码:
/**
* @param {number[][]} times
* @param {number} n
* @param {number} k
* @return {number}
*/
var networkDelayTime = function(times, n, k) {
// 构建邻接表
const graph = Array.from({ length: n + 1 }, () => []); // 节点编号1~n
for (const [u, v, w] of times) {
graph[u].push({ to: v, weight: w });
}
const dist = new Array(n + 1).fill(Infinity);
dist[k] = 0;
// 使用优先队列(最小堆)
const pq = new MinPriorityQueue({ priority: (item) => item.dist });
pq.enqueue({ node: k, dist: 0 });
while (!pq.isEmpty()) {
const { node: u } = pq.dequeue().element;
// 因为优先队列可能包含同一个节点的多个条目,需要跳过已处理的
// 这里我们可以不设 visited,但需要判断如果出队的距离大于当前记录的距离,说明是旧数据,跳过
if (dist[u] < pq.front()?.priority) continue; // 简化处理,实际建议用visited
for (const { to: v, weight } of graph[u]) {
const newDist = dist[u] + weight;
if (newDist < dist[v]) {
dist[v] = newDist;
pq.enqueue({ node: v, dist: newDist });
}
}
}
// 找最大值
let maxDist = 0;
for (let i = 1; i <= n; i++) {
if (dist[i] === Infinity) return -1;
maxDist = Math.max(maxDist, dist[i]);
}
return maxDist;
};时间复杂度:O((V+E)logV)
空间复杂度:O(V+E)
二、Bellman-Ford算法 —— 负权路上的行者
🎯 一句话记住
反复松弛所有边,做 V-1 轮,就能找到最短路径,还能揪出负环。
🤔 核心思想
Bellman-Ford 算法可以处理负权边,并且能检测负权环(环上权值和为负)。它进行 V-1 轮松弛操作(每轮对所有边进行松弛),因为最短路径最多包含 V-1 条边。如果第 V 轮还能松弛,说明存在负环。
松弛操作:对于边 (u, v, w),如果 dist[u] + w < dist[v],则更新 dist[v] = dist[u] + w。
💻 代码实现
/**
* Bellman-Ford算法求单源最短路径,可检测负环
* @param {number} n 顶点数
* @param {number[][]} edges 边集 [u, v, w]
* @param {number} start 起点
* @returns {number[]|null} 最短距离数组,若存在负环则返回null
*/
function bellmanFord(n, edges, start) {
const dist = new Array(n).fill(Infinity);
dist[start] = 0;
// 进行 V-1 轮松弛
for (let i = 0; i < n - 1; i++) {
let updated = false;
for (const [u, v, w] of edges) {
if (dist[u] !== Infinity && dist[u] + w < dist[v]) {
dist[v] = dist[u] + w;
updated = true;
}
}
if (!updated) break; // 提前结束
}
// 第V轮检测负环
for (const [u, v, w] of edges) {
if (dist[u] !== Infinity && dist[u] + w < dist[v]) {
return null; // 存在负环
}
}
return dist;
}🏆 LeetCode实战:K站中转内最便宜的航班
题目描述:有 n 个城市通过一些航班连接。给你一个数组 flights,其中 flights[i] = [from_i, to_i, price_i] ,表示该航班都从城市 from_i 开始,以价格 price_i 抵达 to_i。现在给定所有的城市和航班,以及出发城市 src 和目的地 dst,你的任务是找到出一条最多经过 k 站中转的路线,使得从 src 到 dst 的 价格最便宜 ,并返回该价格。如果不存在这样的路线,则输出 -1。
思路分析:
这题是 Bellman-Ford 的变种,限制最多经过 k 条边(即 k+1 段航班)。我们可以做 k+1 轮松弛,但要注意每轮只能基于上一轮的结果,避免同一轮内串联更新(即使用上一轮的 dist 副本)。通常用动态规划也可以,但 Bellman-Ford 思想很适合。
解题代码:
/**
* @param {number} n
* @param {number[][]} flights
* @param {number} src
* @param {number} dst
* @param {number} k
* @return {number}
*/
var findCheapestPrice = function(n, flights, src, dst, k) {
let dist = new Array(n).fill(Infinity);
dist[src] = 0;
// 最多 k+1 轮(因为 k 次中转,即 k+1 条边)
for (let i = 0; i <= k; i++) {
const newDist = [...dist]; // 使用副本,防止本轮内串联
for (const [u, v, price] of flights) {
if (dist[u] !== Infinity && dist[u] + price < newDist[v]) {
newDist[v] = dist[u] + price;
}
}
dist = newDist;
}
return dist[dst] === Infinity ? -1 : dist[dst];
};时间复杂度:O(k × E)
空间复杂度:O(n)
三、Floyd-Warshall算法 —— 多源最短路径的万能钥匙
🎯 一句话记住
三重循环,动态规划,任意两点之间的最短路径,一网打尽。
🤔 核心思想
Floyd-Warshall 算法用于求所有点对的最短路径。它基于动态规划:dp[k][i][j] 表示经过前 k 个顶点(0..k-1)作为中间点时,i 到 j 的最短路径长度。状态转移:dp[k][i][j] = min(dp[k-1][i][j], dp[k-1][i][k] + dp[k-1][k][j])。空间优化后可以用二维数组,三重循环 k, i, j。
注意:算法要求图中无负环(但可以有负权边,只要没有负环即可正确求出最短路径,如果有负环则算法可能产生错误结果)。
💻 代码实现
/**
* Floyd-Warshall算法求所有点对最短路径
* @param {number} n 顶点数
* @param {number[][]} edges 边集 [u, v, w](可能有负权,但无负环)
* @returns {number[][]} 距离矩阵,若不可达则为Infinity
*/
function floydWarshall(n, edges) {
// 初始化距离矩阵
const dist = Array.from({ length: n }, () => new Array(n).fill(Infinity));
for (let i = 0; i < n; i++) dist[i][i] = 0;
for (const [u, v, w] of edges) {
dist[u][v] = Math.min(dist[u][v], w); // 处理重边
// 如果是无向图,还需 dist[v][u] = w;
}
// 三重循环
for (let k = 0; k < n; k++) {
for (let i = 0; i < n; i++) {
if (dist[i][k] === Infinity) continue; // 剪枝
for (let j = 0; j < n; j++) {
if (dist[k][j] === Infinity) continue;
if (dist[i][k] + dist[k][j] < dist[i][j]) {
dist[i][j] = dist[i][k] + dist[k][j];
}
}
}
}
return dist;
}🏆 LeetCode实战:阈值距离内邻居最少的城市
题目:LeetCode 1334. 阈值距离内邻居最少的城市
题目描述:有 n 个城市,按从 0 到 n-1 编号。给你一个边数组 edges,其中 edges[i] = [from_i, to_i, weight_i] 代表 from_i 和 to_i 两个城市之间的双向加权边,距离阈值是一个整数 distanceThreshold。返回能通过某些路径到达其他城市数目最少、且路径距离 最大 为 distanceThreshold 的城市。如果有多个这样的城市,则返回编号最大的城市。
思路分析:
需要求出所有点对之间的最短路径,然后统计每个城市在阈值内可达的城市数量。Floyd-Warshall 正好适合。
解题代码:
/**
* @param {number} n
* @param {number[][]} edges
* @param {number} distanceThreshold
* @return {number}
*/
var findTheCity = function(n, edges, distanceThreshold) {
// Floyd-Warshall
const INF = 1e9;
const dist = Array.from({ length: n }, () => new Array(n).fill(INF));
for (let i = 0; i < n; i++) dist[i][i] = 0;
for (const [u, v, w] of edges) {
dist[u][v] = Math.min(dist[u][v], w);
dist[v][u] = Math.min(dist[v][u], w);
}
for (let k = 0; k < n; k++) {
for (let i = 0; i < n; i++) {
for (let j = 0; j < n; j++) {
if (dist[i][k] + dist[k][j] < dist[i][j]) {
dist[i][j] = dist[i][k] + dist[k][j];
}
}
}
}
// 统计每个城市在阈值内可达的城市数
let minCount = n;
let result = -1;
for (let i = 0; i < n; i++) {
let count = 0;
for (let j = 0; j < n; j++) {
if (i !== j && dist[i][j] <= distanceThreshold) {
count++;
}
}
if (count < minCount || (count === minCount && i > result)) {
minCount = count;
result = i;
}
}
return result;
};时间复杂度:O(n³)
空间复杂度:O(n²)
四、SPFA算法 —— 队列优化的Bellman-Ford
🎯 一句话记住
只有上一轮被更新的点才可能引起下一轮更新,用队列记下它们。
🤔 核心思想
SPFA(Shortest Path Faster Algorithm)是 Bellman-Ford 的队列优化版本。它维护一个队列,初始时将起点入队。每次取出队首顶点 u,尝试松弛它的所有邻接边;如果某个邻接点 v 的距离被更新且 v 不在队列中,就将 v 入队。重复直到队列为空。
优点:在稀疏图上通常很快,平均复杂度 O(kE),k 为常数。
缺点:最坏情况可能退化为 O(VE),且可能被某些数据卡死。
负环检测:如果一个顶点入队次数超过 V 次,说明存在负环。
💻 代码实现
/**
* SPFA算法求单源最短路径,可检测负环
* @param {number} n 顶点数
* @param {number[][]} edges 边集 [u, v, w]
* @param {number} start 起点
* @returns {number[]|null} 最短距离数组,若存在负环则返回null
*/
function spfa(n, edges, start) {
// 构建邻接表
const graph = Array.from({ length: n }, () => []);
for (const [u, v, w] of edges) {
graph[u].push({ to: v, weight: w });
}
const dist = new Array(n).fill(Infinity);
dist[start] = 0;
const queue = [start];
const inQueue = new Array(n).fill(false);
inQueue[start] = true;
const count = new Array(n).fill(0); // 记录入队次数
while (queue.length) {
const u = queue.shift();
inQueue[u] = false;
for (const { to: v, weight } of graph[u]) {
if (dist[u] + weight < dist[v]) {
dist[v] = dist[u] + weight;
if (!inQueue[v]) {
queue.push(v);
inQueue[v] = true;
count[v]++;
if (count[v] > n) { // 存在负环
return null;
}
}
}
}
}
return dist;
}🏆 LeetCode实战:判断是否存在负环
SPFA 适用于带负权的最短路径问题,比如下面这道题:
题目:给定一个有向图,包含 n 个节点,边可能带有负权。请判断图中是否存在负权环。
思路:使用 SPFA,如果某个节点入队次数超过 n 次,则存在负环。
解题代码(SPFA 版 LeetCode 787):
var findCheapestPrice = function(n, flights, src, dst, k) {
// 构建邻接表
const graph = Array.from({ length: n }, () => []);
for (const [u, v, p] of flights) {
graph[u].push({ to: v, price: p });
}
const dist = new Array(n).fill(Infinity);
dist[src] = 0;
const steps = new Array(n).fill(0); // 记录到达每个节点经过的边数(不是必须)
};五、四大算法对比总结
| 算法 | 适用场景 | 时间复杂度 | 能否处理负权 | 能否检测负环 | 特点 |
|---|---|---|---|---|---|
| Dijkstra | 非负权图 | O((V+E)logV) | ❌ | ❌ | 贪心,效率高 |
| Bellman-Ford | 一般图(可负权) | O(VE) | ✅ | ✅ | 原理简单,较慢 |
| Floyd-Warshall | 多源最短路(无负环) | O(V³) | ✅(无负环) | ❌ | 简洁,适合小图 |
| SPFA | 稀疏图(可负权) | 平均O(kE),最坏O(VE) | ✅ | ✅ | 队列优化,不稳定 |
如何选择?
-
单源、非负权 → Dijkstra(最快)
-
单源、可能有负权 → Bellman-Ford(可靠)或 SPFA(快速,但小心被卡)
-
多源、图较小 → Floyd-Warshall(代码简单)
-
需要检测负环 → Bellman-Ford 或 SPFA
📌 面试常见问题
-
Dijkstra 为什么不能处理负权边?
-
Dijkstra 基于贪心,每次选择当前距离最小的点,认为它不会再被更新。但负权边可能导致后面出现更短路径,破坏贪心选择性质。
-
-
Bellman-Ford 如何检测负环?
-
进行 V-1 轮松弛后,再对所有边松弛一次,如果还能更新,说明存在负环。
-
-
Floyd-Warshall 的状态转移方程怎么理解?
-
dist[i][j] = min(dist[i][j], dist[i][k] + dist[k][j]),表示考虑经过顶点 k 的路径是否更短。
-
-
SPFA 为什么可能被卡?
-
在某些构造的图中,SPFA 可能退化为 Bellman-Ford 的 O(VE),如网格图。竞赛中常用 Dijkstra 或 Bellman-Ford 保证稳定性。
-
🎯 下期预告
下一期我们将进入图论算法(三):最小生成树——Prim 和 Kruskal,用最少的边连通所有顶点!
如果你觉得这篇文章对你有帮助,欢迎点赞、收藏、转发!有问题欢迎在评论区讨论~

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 15
15 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)