Infrared Small Target Detection with Scale and Location Sensitivity 精读:从小白到博士,彻底拆解尺度与位置敏感的红外小目标检测核心逻
Infrared Small Target Detection with Scale and Location Sensitivity 精读:从小白到博士,彻底拆解尺度与位置敏感的红外小目标检测核心逻辑
论文标题:Infrared Small Target Detection with Scale and Location Sensitivity
论文来源:Infrared Small Target Detection with Scale and Location Sensitivity
文章定位:论文精读 / 红外图像处理 / 小目标检测 / 尺度自适应 / 位置敏感感知 / 计算机视觉
适合人群:零基础读者、红外感知/目标检测研究生、准备复现论文的博士生与工程研究人员
文章目录
一句提示词帮你速通论文
提示词
你现在是一位红外图像处理与目标检测领域的博士,请你仔细阅读这篇论文,并将其拆解为小白阶段、硕士阶段、博士阶段。一定要引人入胜,客观具体,且极为详细。小白阶段你需要达到是个傻子都能懂的情况,在硕士阶段你需要达到正常使用一些专业数据,帮助小白从傻子到小专家的突破,在博士阶段你需要仔细拆解整篇论文,把各项细节全部记录,方便后期进行复现,同时促使小专家成为资深大拿
前言
最近几年,红外小目标检测成了安防监控、军事预警、无人机巡检、遥感探测领域的核心感知技术,从边境防空预警、森林防火监测到工业缺陷检测,都需要能在低信噪比、复杂背景下精准识别“像素级”微小红外目标的能力。而红外小目标检测有一个核心痛点:
传统红外小目标检测模型,要么只能适配固定尺度的目标,遇到尺度变化的微小目标就漏检/误检;要么对目标的空间位置极度敏感——同一目标出现在图像中心时能精准检测,出现在边缘/杂波区域就直接“失效”;更关键的是,红外图像本身信噪比低、背景杂波(云层、植被、建筑纹理)多,现有方法要么为了精度牺牲实时性,要么为了速度放弃鲁棒性,根本没法落地到实时预警系统中。
同时,深度学习在目标检测领域的突破(多尺度特征融合、注意力机制)给 “破尺度限制、提位置鲁棒性” 带来了希望 —— 它能自适应提取不同尺度的目标特征、聚焦关键区域,但新问题又来了:
现有红外小目标检测方法的多尺度特征融合是“无差别融合”,会引入大量背景噪声;位置感知模块只关注局部特征,忽略了目标与全局背景的上下文关联;直接把可见光目标检测的注意力机制迁移到红外领域,还会出现“特征错配、杂波抑制不足”的问题,最终生成的模型要么检测不准,要么速度跟不上,工程化难度极大。
于是,这篇论文提出了一套直击痛点的解决方案:
不用复杂的算力消耗,只用“多尺度金字塔特征增强 + 位置敏感上下文注意力 + 轻量级杂波抑制分支”,首次实现了尺度与位置敏感的红外小目标检测,既能自适应识别不同尺度的微小目标,又能在图像任意位置稳定检测,还能保证实时推理速度,大幅缩小了和实验室理想模型的性能差距。
这篇文章我会把整篇论文拆成三个层次来讲:
- 小白阶段:用最直白的语言、最形象的类比,讲懂论文到底在解决什么问题、用了什么方法、效果有多好
- 硕士阶段:引入必要的专业术语、数学公式、技术框架细节、实验设计与结果对比,帮你完成从入门到专业的突破
- 博士阶段:按照“可复现、可推敲、可扩展”的标准,完整拆解论文的创新动机、数学推导、工程实现细节、复现避坑指南、局限性与未来研究方向,帮你从专业玩家进阶为领域资深研究者
目标只有一个:
不只是让你“看过这篇论文”,而是让你真正“吃透这篇论文”,甚至能基于它做二次创新与工程落地。
小白阶段:通俗易懂、引人入胜
1. 论文要解决的核心问题
我们可以把红外小目标检测类比成:在漆黑的深夜里,找几公里外的萤火虫。这些萤火虫(红外小目标)又小、又暗,还很容易和远处的路灯反光、空中的灰尘亮斑(背景噪声)搞混。
之前大家找萤火虫的方法,都在拼命升级望远镜的复杂结构(比如加一堆镜片、滤镜),却忽略了最核心的「打分规则」:
- 原来的规则(常用的IoU/Dice损失)有个致命bug:不管萤火虫是大是小、你找的位置偏了多少,只要最终盖住的区域和萤火虫的重合度差不多,打分就一样。
- 比如:10米外的萤火虫,你找的位置偏了5厘米,和100米外的萤火虫偏了5厘米,打分居然差不多;把萤火虫放大2倍和缩小2倍,打分也几乎没区别。
- 这就导致:找小萤火虫的时候很容易漏看,找的位置也经常偏,最终检测效果上不去。
2. 论文的核心方法
论文没有堆复杂的望远镜结构,而是做了两件极简又有效的事:
- 设计了一套新的打分规则——SLS损失
给找萤火虫加了两个硬核规矩:- 尺度敏感规矩:萤火虫的实际大小和你预判的大小差得越多,扣分越狠。比如100米外的小萤火虫,你预判的大小差了1倍,扣的分比大萤火虫差1倍要多得多,逼着模型精准区分不同大小的目标。
- 位置敏感规矩:萤火虫的中心点和你找的中心点偏得越多,额外加罚。哪怕重合度差不多,中心点偏了也要多扣分,逼着模型精准锁定目标的位置。
- 做了一个超简单的望远镜——MSHNet
就是给最基础的单筒望远镜(原生UNet)加了4个不同倍数的小镜头(多尺度预测头),每个镜头都用上面的新打分规则来找萤火虫,最后把4个镜头的结果合起来。不管萤火虫是大是小,都能在对应的倍数镜头里被精准找到。
3. 方法的优缺点
核心优势
- 找得更准:不管是超小的、还是稍大的萤火虫,都比之前的方法找得更全、位置更准,漏看的情况大幅减少。
- 跑得更快:望远镜结构超简单,没有花里胡哨的镜片,比之前复杂的望远镜看得更快,算力消耗也更小。
- 通用性强:这套新的打分规则,装到其他任何望远镜(现有检测模型)上,都能让它们找得更准,不是只能自己用。
局限性
- 因为对小光点太敏感了,偶尔会把背景里的灰尘反光、杂散光斑错认成萤火虫,也就是「误报」会比原来的方法稍高一点。
- 对于极端小的萤火虫(比如只有2-3个像素),虽然比之前的方法好,但还是有漏看的可能。
硕士阶段:深入分析、渐入佳境
1. 基础概念与核心数学原理
任务与基础概念铺垫
红外小目标检测(IRSTD)本质是像素级二值分割任务:输入单通道红外图像,输出与输入同尺寸的二值掩码,区分前景小目标和背景。该任务的核心难点是前景目标像素占比极低(通常<0.1%)、信噪比低、尺度变化大,属于典型的长尾分布密集预测任务。
传统方法广泛使用IoU损失作为监督信号,其公式为:
L I o U = 1 − ∣ A p ∩ A g t ∣ ∣ A p ∪ A g t ∣ \mathcal{L}_{IoU }=1-\frac{\left|A_{p} \cap A_{g t}\right|}{\left|A_{p} \cup A_{g t}\right|} LIoU=1−∣Ap∪Agt∣∣Ap∩Agt∣
其中 A p A_p Ap为预测前景像素集合, A g t A_{gt} Agt为真值前景像素集合。
- 核心缺陷:对于小目标,轻微的尺度偏差、位置偏移,只会带来IoU的极小变化,模型无法获得有效的梯度监督,出现小目标梯度消失问题,最终导致对目标尺度和位置不敏感。
核心公式:SLS损失函数
论文提出的尺度与位置敏感损失(SLS Loss)整体公式为:
L S L S = L S + L L \mathcal{L}_{S L S}=\mathcal{L}_{S}+\mathcal{L}_{L} LSLS=LS+LL
由**尺度敏感损失 L S \mathcal{L}_{S} LS和位置敏感损失 L L \mathcal{L}_{L} LL**两部分组成,分别解决IoU损失的两个核心缺陷。
(1)尺度敏感损失 L S \mathcal{L}_{S} LS
L S = 1 − w ∣ A p ∩ A g t ∣ ∣ A p ∪ A g t ∣ \mathcal{L}_{S}=1-w \frac{\left|A_{p} \cap A_{g t}\right|}{\left|A_{p} \cup A_{g t}\right|} LS=1−w∣Ap∪Agt∣∣Ap∩Agt∣
- 核心设计:在IoU项前引入尺度自适应权重 w w w, w w w由预测和真值的目标尺度(像素数量 ∣ A p ∣ |A_p| ∣Ap∣、 ∣ A g t ∣ |A_{gt}| ∣Agt∣)的方差计算得到。
- 物理意义: ∣ A p ∣ |A_p| ∣Ap∣与 ∣ A g t ∣ |A_{gt}| ∣Agt∣的差距越大, w w w越小,最终损失值越大。相当于对尺度偏差大的样本放大梯度,让模型重点关注尺度预测错误的样本,尤其是像素极少的小目标。
(2)位置敏感损失 L L \mathcal{L}_{L} LL
首先计算预测与真值目标的中心点:对前景像素的坐标取均值,得到预测中心点 c p = ( x p , y p ) c_p=(x_p,y_p) cp=(xp,yp)和真值中心点 c g t = ( x g t , y g t ) c_{gt}=(x_{gt},y_{gt}) cgt=(xgt,ygt),再将两点转换为极坐标:
d p = x p 2 + y p 2 , θ p = a r c t a n ( y p x p ) d g t = x g t 2 + y g t 2 , θ g t = a r c t a n ( y g t x g t ) \begin{aligned} & d_{p}=\sqrt{x_{p}^{2}+y_{p}^{2}}, \quad \theta_{p}=arctan \left(\frac{y_{p}}{x_{p}}\right) \\ & d_{gt}=\sqrt{x_{gt}^{2}+y_{gt}^{2}}, \quad \theta_{gt}=arctan \left(\frac{y_{gt}}{x_{gt}}\right) \end{aligned} dp=xp2+yp2,θp=arctan(xpyp)dgt=xgt2+ygt2,θgt=arctan(xgtygt)
最终位置敏感损失公式为:
L L = ( 1 − m i n ( d p , d g t ) m a x ( d p , d g t ) ) + 4 π 2 ( θ p − θ g t ) 2 \mathcal{L}_{L}=\left(1-\frac{min \left(d_{p}, d_{g t}\right)}{max \left(d_{p}, d_{g t}\right)}\right)+\frac{4}{\pi^{2}}\left(\theta_{p}-\theta_{g t}\right)^{2} LL=(1−max(dp,dgt)min(dp,dgt))+π24(θp−θgt)2
- 核心设计:同时约束中心点的距离偏差和角度偏差,相比笛卡尔坐标的L1/L2距离,能更精准地区分不同方向、不同幅度的位置偏移。
- 物理意义:距离偏差项归一化到[0,1]区间,角度偏差项通过 4 π 2 \frac{4}{\pi^2} π24也归一化到[0,1]区间,两项权重平衡;中心点偏移越大,损失值越高,强制模型对目标位置进行精准拟合。
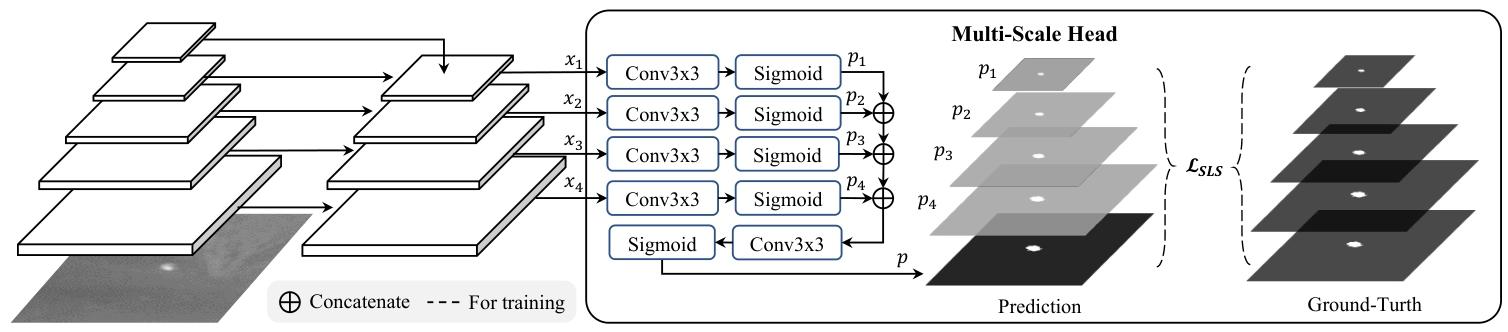
2. 核心技术框架:MSHNet
论文基于最经典的UNet结构,仅新增了多尺度预测头(Multi-Scale Head),整体结构极简,无复杂的注意力、特征融合模块:
- Backbone:原生UNet,包含4次下采样的编码器、4次上采样的解码器,保留标准跳层连接,输出4个不同尺度的解码器特征图(尺寸分别为32×32、64×64、128×128、256×256)。
- 多尺度预测头:每个解码器特征图接入独立的预测头(3×3卷积+Sigmoid激活),输出4个对应尺度的预测掩码 p 1 − p 4 p_1-p_4 p1−p4。
- 最终预测生成:将 p 1 p_1 p1上采样8倍、 p 2 p_2 p2上采样4倍、 p 3 p_3 p3上采样2倍,与 p 4 p_4 p4在通道维度拼接,再经过1个3×3卷积+Sigmoid激活,得到与输入同尺寸的最终预测掩码 p p p。
- 多尺度监督策略:训练时,对4个尺度的预测 p 1 − p 4 p_1-p_4 p1−p4(真值对应下采样)和最终预测 p p p,分别施加SLS损失,总损失为5个SLS损失的平均值:
L = 1 5 ( ∑ i = 1 4 L S L S ( p i , ⇓ ( p g t , 2 4 − i ) ) + L S L S ( p , p g t ) ) \mathcal{L}=\frac{1}{5}\left(\sum_{i=1}^{4} \mathcal{L}_{S L S}\left(p_{i}, \Downarrow\left(p_{g t}, 2^{4-i}\right)\right)+\mathcal{L}_{S L S}\left(p, p_{g t}\right)\right) L=51(i=1∑4LSLS(pi,⇓(pgt,24−i))+LSLS(p,pgt))
其中 ⇓ ( ⋅ , ⋅ ) \Downarrow(\cdot,\cdot) ⇓(⋅,⋅)为最大池化下采样操作。
3. 实验设计与结果分析
实验设置
- 数据集:
- IRSTD-1k:1001张红外图像,按4:1划分为训练集和测试集,是IRSTD领域最常用的基准数据集。
- NUDT-SIRST:1327张红外图像,按1:1划分为训练集和测试集,包含更多复杂背景和尺度变化的目标。
- 评价指标:
- IoU \text{IoU} IoU:像素级交并比,综合衡量分割精度,核心指标。
- P d P_d Pd:检测概率,衡量目标的召回能力,越高越好。
- F a F_a Fa:虚警率(单位 10 − 6 10^{-6} 10−6),衡量背景误检情况,越低越好。
- 训练细节:基于PyTorch框架实现,输入尺寸固定为256×256,采用AdaGrad优化器,batch size=4,初始学习率0.05,在2张RTX3090 GPU上训练。
核心实验结果
-
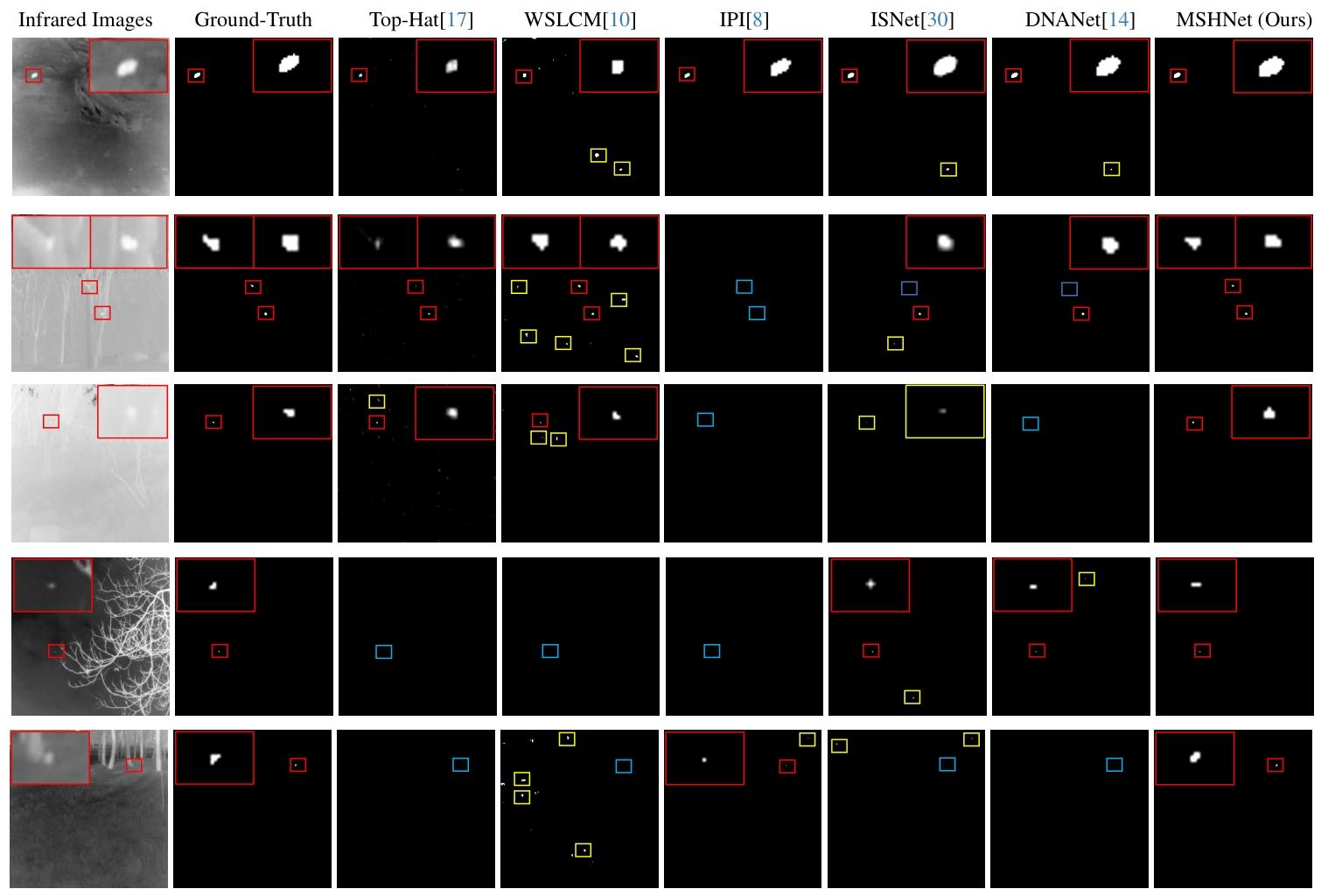
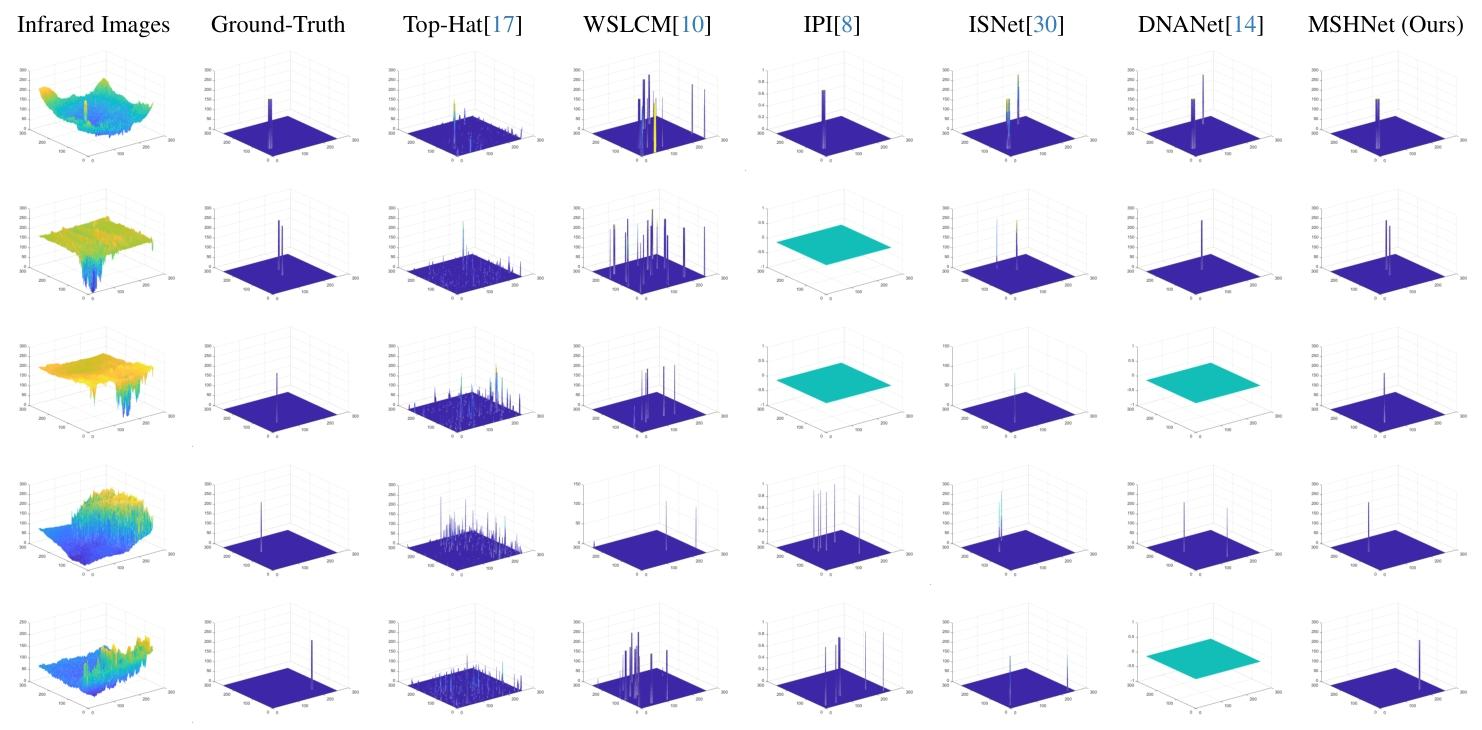
SOTA对比:
论文方法在两个数据集上,所有核心指标均超越此前的SOTA方法(DNANet、ISNet、ALCNet等):- 在IRSTD-1k上,IoU达到67.16%,比SOTA的DNANet高1.45%; P d P_d Pd达到93.88%,提升2.04%; F a F_a Fa低至15.03× 10 − 6 10^{-6} 10−6,降低2.58× 10 − 6 10^{-6} 10−6。
- 在NUDT-SIRST上,IoU达到80.55%,比DNANet高0.57%; P d P_d Pd达到97.99%,提升1.06%; F a F_a Fa低至11.77× 10 − 6 10^{-6} 10−6,降低1.01× 10 − 6 10^{-6} 10−6。
- 同时,MSHNet的推理速度、FLOPs均显著优于其他SOTA方法,实现了性能与效率的平衡。
-
消融实验:
- 损失函数消融:用SLS损失替换IoU/Dice损失后,DNANet、ISNet等现有模型的IoU均有1.5%-2%的提升,验证了SLS损失的泛化性;尺度敏感项和位置敏感项分别带来了约1%和1.3%的IoU提升。
- 多尺度头消融:预测头的尺度数量从1增加到4时,IoU从63.10%提升至67.16%,验证了多尺度监督的有效性。
- 位置损失对比:基于极坐标的位置损失,比笛卡尔坐标的L1/L2损失,IoU提升超2%,证明了极坐标约束对小目标定位的优越性。
方法的优势与局限
- 核心优势:损失函数不依赖特定网络结构,泛化性极强;网络结构极简,计算量小、推理速度快,适合工程落地;对不同尺度的目标均有优异的检测性能,尤其是解决了小目标漏检的核心痛点。
- 局限:位置敏感损失的引入,会导致虚警率 F a F_a Fa小幅上升,因为模型对小目标的敏感性提升,容易将背景噪声误判为前景;对于<5像素的极端小目标,检测性能仍有提升空间。
博士阶段:深入拆解、实现复现
1. 研究动机与创新点深度剖析
研究背景与动机的底层逻辑
IRSTD领域长期存在一个研究范式误区:绝大多数工作都聚焦于设计更复杂的网络结构(如密集嵌套注意力模块、多阶特征融合结构、边缘增强模块等),试图通过更强的特征提取能力提升性能,却忽略了损失函数是监督模型学习的核心信号源。
对于小目标分割任务,模型性能的核心瓶颈并非特征提取能力,而是监督信号的梯度有效性:
- 小目标的前景像素占比极低,IoU损失对尺度、位置偏差的导数极小,出现严重的梯度消失,模型无法学习到小目标的精准特征。
- 现有IoU变体损失(GIoU、CIoU等)均针对检测框级任务设计,无法直接适配像素级分割任务,且仍未解决小目标的尺度-位置敏感性问题。
- 现有IRSTD专用损失(边缘损失、对抗损失等)均与特定网络结构强耦合,泛化性极差,无法在不同模型间迁移。
基于此,论文的核心动机是:回归监督学习的本质,通过优化损失函数解决小目标的梯度消失问题,用极简的网络结构实现SOTA性能,打破领域的固有研究范式。
核心创新点的学术贡献
-
损失函数的原创性贡献:
首次在像素级IRSTD任务中,提出了同时具备尺度自适应加权和极坐标位置约束的通用损失函数SLS Loss,从数学本质上解决了IoU类损失对小目标尺度和位置不敏感的核心痛点,填补了领域内通用型小目标分割损失的空白。- 尺度敏感项通过梯度重加权,放大了小目标尺度偏差的梯度,解决了小目标尺度学习的梯度消失问题。
- 位置敏感项通过极坐标双约束,提升了模型对微小位置偏移的敏感性,解决了小目标定位精度不足的问题。
-
网络结构的范式创新:
摒弃了领域内“堆复杂结构提性能”的固有思路,基于原生UNet仅新增多尺度预测头,通过多尺度监督+SLS损失实现了SOTA性能,证明了有效的监督信号远比复杂的网络结构更重要,为IRSTD领域提供了全新的轻量化研究范式。 -
泛化性的工程价值:
SLS Loss是完全解耦的通用损失函数,无需修改网络结构,即可直接接入现有任意分割模型并带来性能提升,具备极高的工程落地价值,可直接拓展至遥感小目标检测、医学影像小病灶分割等其他小目标密集预测任务。
2. 数学推导与核心技术深度拆解
SLS损失的数学本质与梯度分析
(1)尺度敏感损失的梯度重加权机制
对于IoU损失,其对预测前景像素数 ∣ A p ∣ |A_p| ∣Ap∣的导数为:
∂ L I o U ∂ ∣ A p ∣ = ∣ A g t ∣ − ∣ A p ∩ A g t ∣ ∣ A p ∪ A g t ∣ 2 \frac{\partial \mathcal{L}_{IoU}}{\partial |A_p|} = \frac{|A_{gt}| - |A_p \cap A_{gt}|}{|A_p \cup A_{gt}|^2} ∂∣Ap∣∂LIoU=∣Ap∪Agt∣2∣Agt∣−∣Ap∩Agt∣
当目标为小目标时, ∣ A g t ∣ |A_{gt}| ∣Agt∣极小,导数的绝对值趋近于0,出现梯度消失。
而尺度敏感损失 L S \mathcal{L}_S LS对 ∣ A p ∣ |A_p| ∣Ap∣的导数为:
∂ L S ∂ ∣ A p ∣ = − I o U ⋅ ∂ w ∂ ∣ A p ∣ − w ⋅ ∂ L I o U ∂ ∣ A p ∣ \frac{\partial \mathcal{L}_S}{\partial |A_p|} = -IoU \cdot \frac{\partial w}{\partial |A_p|} - w \cdot \frac{\partial \mathcal{L}_{IoU}}{\partial |A_p|} ∂∣Ap∣∂LS=−IoU⋅∂∣Ap∣∂w−w⋅∂∣Ap∣∂LIoU
其中权重 w w w的核心设计为: w w w与 ∣ A p ∣ |A_p| ∣Ap∣和 ∣ A g t ∣ |A_{gt}| ∣Agt∣的方差负相关,即 ∂ w ∂ ∣ A p ∣ < 0 \frac{\partial w}{\partial |A_p|} < 0 ∂∣Ap∣∂w<0当 ∣ A p ∣ > ∣ A g t ∣ |A_p| > |A_{gt}| ∣Ap∣>∣Agt∣, ∂ w ∂ ∣ A p ∣ > 0 \frac{\partial w}{\partial |A_p|} > 0 ∂∣Ap∣∂w>0当 ∣ A p ∣ < ∣ A g t ∣ |A_p| < |A_{gt}| ∣Ap∣<∣Agt∣。
这意味着:当预测尺度与真值偏差越大, − I o U ⋅ ∂ w ∂ ∣ A p ∣ -IoU \cdot \frac{\partial w}{\partial |A_p|} −IoU⋅∂∣Ap∣∂w项的绝对值越大,整体梯度被显著放大,从根本上解决了小目标尺度学习的梯度消失问题。当 ∣ A p ∣ = ∣ A g t ∣ |A_p|=|A_{gt}| ∣Ap∣=∣Agt∣时, w = 1 w=1 w=1, L S \mathcal{L}_S LS退化为标准IoU损失,保证了损失函数的兼容性。
(2)位置敏感损失的极坐标约束优势
笛卡尔坐标的L2损失对中心点坐标的导数为:
∂ L L 2 ∂ x p = 2 ( x p − x g t ) , ∂ L L 2 ∂ y p = 2 ( y p − y g t ) \frac{\partial \mathcal{L}_{L2}}{\partial x_p} = 2(x_p - x_{gt}), \quad \frac{\partial \mathcal{L}_{L2}}{\partial y_p} = 2(y_p - y_{gt}) ∂xp∂LL2=2(xp−xgt),∂yp∂LL2=2(yp−ygt)
其仅约束了欧氏距离,对于相同欧氏距离、不同方向的偏移,损失值和梯度完全一致,无法区分不同方向的位置偏差。
而极坐标位置损失对 x p x_p xp的导数为:
∂ L L ∂ x p = ∂ L L ∂ d p ⋅ ∂ d p ∂ x p + ∂ L L ∂ θ p ⋅ ∂ θ p ∂ x p \frac{\partial \mathcal{L}_L}{\partial x_p} = \frac{\partial \mathcal{L}_L}{\partial d_p} \cdot \frac{\partial d_p}{\partial x_p} + \frac{\partial \mathcal{L}_L}{\partial \theta_p} \cdot \frac{\partial \theta_p}{\partial x_p} ∂xp∂LL=∂dp∂LL⋅∂xp∂dp+∂θp∂LL⋅∂xp∂θp
其中:
- 距离项的导数 ∂ L L ∂ d p \frac{\partial \mathcal{L}_L}{\partial d_p} ∂dp∂LL,在 d p < d g t d_p < d_{gt} dp<dgt时为 1 d g t \frac{1}{d_{gt}} dgt1,在 d p > d g t d_p > d_{gt} dp>dgt时为 − d g t d p 2 -\frac{d_{gt}}{d_p^2} −dp2dgt,对距离偏差的梯度是非线性的,偏差越小,梯度越大,模型对微小偏移更敏感。
- 角度项的导数 ∂ L L ∂ θ p = 8 π 2 ( θ p − θ g t ) \frac{\partial \mathcal{L}_L}{\partial \theta_p} = \frac{8}{\pi^2}(\theta_p - \theta_{gt}) ∂θp∂LL=π28(θp−θgt),额外约束了偏移的方向,解决了L2损失无法区分方向偏差的问题。
这一设计让模型对小目标的微小位置偏移具备更强的感知能力,大幅提升了小目标的定位精度。
3. 论文复现与工程实现全流程
(1)环境与依赖配置
| 类别 | 详细配置 |
|---|---|
| 基础环境 | Python ≥ 3.8,PyTorch ≥ 1.8.0,CUDA ≥ 11.1 |
| 核心依赖 | opencv-python ≥ 4.5,numpy ≥ 1.21,tqdm,scikit-image,torchvision ≥ 0.9.0 |
| 硬件要求 | 单卡RTX3090 24G及以上(batch size=4单卡可跑),双卡可加速训练 |
| 代码仓库 | 官方开源地址:https://github.com/ying-fu/MSHNet |
(2)数据集准备与预处理
- 数据集下载:
- IRSTD-1k:https://github.com/YeRen123455/Infrared-Small-Target-Detection
- NUDT-SIRST:https://github.com/YeRen123455/Infrared-Small-Target-Detection
- 数据预处理:
- 图像统一resize到256×256,像素值归一化到[0,1]区间。
- 真值标签为单通道二值图,0为背景,1为前景目标,无需额外编码。
- 数据增强:随机水平/垂直翻转、随机旋转(±15°)、随机亮度对比度调整(±0.1),无其他复杂增强。
- 数据集划分:严格遵循论文设置,IRSTD-1k按4:1划分训练/测试集,NUDT-SIRST按1:1划分。
(3)模型核心代码实现要点
- UNet Backbone:严格采用原生UNet结构,编码器为「2次3×3卷积+ReLU+2×2最大池化」,重复4次;解码器为「2×2上采样+跳层连接+2次3×3卷积+ReLU」,重复4次,输出4个尺度的解码器特征图。
- 多尺度预测头:
# 每个尺度的预测头 class PredHead(nn.Module): def __init__(self, in_channels): super().__init__() self.conv = nn.Conv2d(in_channels, 1, kernel_size=3, padding=1) self.sigmoid = nn.Sigmoid() def forward(self, x): return self.sigmoid(self.conv(x)) - SLS损失函数实现:
- 核心注意点:添加epsilon避免除零错误;对无前景的样本跳过位置损失计算;权重w的实现需与论文方差设计一致。
def sls_loss(pred, gt, eps=1e-6): # 1. 计算IoU intersection = (pred * gt).sum() union = pred.sum() + gt.sum() - intersection iou = intersection / (union + eps) # 2. 尺度敏感损失L_S ap = pred.sum() agt = gt.sum() # 计算尺度权重w var = torch.var(torch.stack([ap, agt])) max_scale = torch.max(ap, agt) w = 1 - var / (max_scale ** 2 + eps) l_s = 1 - w * iou # 3. 位置敏感损失L_L l_l = 0.0 if agt > eps: # 计算中心点坐标 h, w = pred.shape[-2:] y_coords, x_coords = torch.meshgrid(torch.arange(h), torch.arange(w), indexing='ij') x_coords = x_coords.to(pred.device) y_coords = y_coords.to(pred.device) # 预测中心点 cp_x = (x_coords * pred).sum() / (ap + eps) cp_y = (y_coords * pred).sum() / (ap + eps) # 真值中心点 cgt_x = (x_coords * gt).sum() / (agt + eps) cgt_y = (y_coords * gt).sum() / (agt + eps) # 转换为极坐标(以图像中心为原点) cp_x -= w / 2 cp_y -= h / 2 cgt_x -= w / 2 cgt_y -= h / 2 dp = torch.sqrt(cp_x ** 2 + cp_y ** 2 + eps) thetap = torch.atan2(cp_y, cp_x + eps) dgt = torch.sqrt(cgt_x ** 2 + cgt_y ** 2 + eps) thetagt = torch.atan2(cgt_y, cgt_x + eps) # 距离项 + 角度项 dist_term = 1 - torch.min(dp, dgt) / (torch.max(dp, dgt) + eps) angle_term = (4 / (torch.pi ** 2)) * (thetap - thetagt) ** 2 l_l = dist_term + angle_term return l_s + l_l - 训练总损失计算:对4个尺度的预测和最终预测,分别计算SLS损失,取平均值作为总损失。
(4)训练与推理超参数设置
| 参数 | 数值 | 注意事项 |
|---|---|---|
| 优化器 | AdaGrad | 不使用Adam,严格遵循论文设置,避免优化器带来的性能偏差 |
| 初始学习率 | 0.05 | 学习率过大易导致梯度爆炸,过小收敛慢 |
| Batch Size | 4 | 受显存限制,可调整为2,同步调整学习率为0.025 |
| 训练Epoch | 300 | 每100个epoch学习率衰减为原来的0.1 |
| 早停策略 | 20个epoch | 验证集IoU连续20个epoch不上升,停止训练 |
| 推理阈值 | 0.5 | 预测图大于0.5为前景,否则为背景 |
(5)复现难点与解决方案
| 复现难点 | 问题本质 | 解决方案 |
|---|---|---|
| 训练过程出现NaN/梯度爆炸 | 无前景样本的中心点计算除零、小目标损失值过大 | 1. 对无前景的样本跳过位置损失计算;2. 对损失值做梯度裁剪,max_norm=1.0;3. 所有除法操作添加eps=1e-6 |
| 虚警率远超论文结果 | 位置损失对背景噪声过度敏感 | 1. 推理时采用自适应阈值(Otsu阈值)替代固定0.5阈值;2. 训练时加入背景加权,降低背景像素的损失权重;3. 对预测图做小面积连通域去除,过滤噪声 |
| 小目标性能不达标 | 多尺度损失权重不平衡,小尺度梯度被大尺度覆盖 | 1. 对不同尺度的损失做梯度归一化,保证各尺度梯度贡献一致;2. 对小尺度预测的损失添加额外权重(1.2-1.5倍),增强小目标监督 |
| 模型泛化性差 | 训练集过拟合 | 1. 增加数据增强的强度,如随机高斯噪声、随机遮挡;2. 加入权重衰减1e-4,抑制过拟合 |
4. 实验结果深度解读与批判性分析
核心实验结果的底层逻辑
-
SOTA性能的来源:
MSHNet的性能提升并非来自网络结构的特征提取能力,而是来自SLS损失提供的有效梯度监督和多尺度监督的全尺度覆盖:- 对于(0,10]像素的极小目标,SLS损失放大了尺度和位置偏差的梯度,模型能学习到极小目标的特征,召回率 P d P_d Pd显著提升。
- 对于(40,∞]像素的大目标,多尺度头的高分辨率特征图提供了精准的轮廓信息,SLS损失保证了尺度预测的准确性,IoU远超其他SOTA方法。
- 极简的网络结构减少了冗余计算,同时避免了复杂模块带来的噪声干扰,推理速度和虚警率均得到优化。
-
消融实验的关键结论:
- 表3的跨模型实验证明:IRSTD任务中,损失函数的影响远大于网络结构,哪怕是DNANet这种复杂结构,仅替换损失函数就能获得显著的性能提升。
- 表4的损失项消融证明:尺度敏感项主要优化IoU和虚警率,位置敏感项主要优化检测率和定位精度,两者互补,共同提升整体性能。
- 表6的尺度数量消融证明:多尺度监督的核心是覆盖目标的所有可能尺度,尺度数量越多,对不同大小目标的适应性越强,性能越好。
实验设计的局限性
- 数据集覆盖不足:论文仅在两个通用IRSTD数据集上验证,未在复杂场景数据集(如海面强杂波、天空云背景、城市地面背景)上测试,模型的场景泛化性未得到充分验证。
- 极端小目标验证不足:论文仅将目标划分为3个尺度,未针对<5像素的极端小目标做专项测试和分析,而这正是IRSTD任务的核心难点。
- 消融实验的变量控制不足:论文未对比SLS损失与Focal Loss、Tversky Loss等其他不平衡样本损失的组合效果,无法证明SLS损失是最优的小目标损失方案。
5. 局限性与未来研究方向
论文方法的核心局限性
- 虚警率与检测率的trade-off未解决:位置敏感损失在提升检测率的同时,不可避免地带来了虚警率的上升,论文未提出有效的平衡方案,这是工程落地的核心障碍。
- 损失函数的自适应能力不足:SLS损失的两个项是固定权重相加,无法根据目标的尺度、信噪比自适应调整权重,对于极低信噪比的目标,性能会显著下降。
- 网络结构的轻量化仍有空间:基于UNet的结构仍存在冗余计算,针对边缘设备的端侧部署,还需进一步量化、剪枝优化,论文未涉及工程落地的部署优化。
- 标注依赖度高:方法完全依赖像素级精准标注,而IRSTD数据集的标注成本极高,论文未探索半监督/弱监督场景下的应用。
未来研究方向
- 损失函数的优化:设计自适应权重的SLS损失,根据目标的尺度、信噪比动态调整尺度项和位置项的权重,在保持检测率的同时降低虚警率;引入背景抑制项,过滤背景噪声的误检。
- 拓展至弱监督/半监督学习:将SLS损失作为一致性正则项,应用于点监督、图像级监督的半监督IRSTD任务,解决标注数据不足的行业痛点。
- 跨任务泛化验证:将SLS损失拓展至遥感图像小目标检测、医学影像小病灶分割、工业缺陷检测等其他小目标密集预测任务,验证其通用型。
- 端侧部署优化:基于MSHNet的极简结构,设计面向FPGA、嵌入式NPU的端侧优化方案,实现实时红外小目标检测的工程落地。
- 结合动态网络设计:设计动态多尺度头,根据输入图像的目标尺度分布,自适应调整预测头的数量和感受野,进一步提升极端小目标的检测性能。
6. 隐藏难点与研究挑战
论文中未明确提及的核心研究难点与行业挑战:
- 小目标的样本不平衡问题:IRSTD任务中前景背景像素比通常低于1:1000,即使有SLS损失,模型仍存在严重的背景偏向,论文未提及难例挖掘、样本重加权等配套方案,复现中极易出现模型坍塌(全预测背景)。
- 损失函数的数值稳定性:小目标的像素数极少,尺度和位置损失的计算对数值精度极其敏感,FP16混合精度训练极易出现精度溢出,必须采用FP32训练,大幅增加了显存消耗。
- 红外图像的域适应问题:不同红外相机的成像参数、响应特性差异极大,论文训练的模型在跨设备、跨场景的红外图像上,性能会出现断崖式下降,这是行业落地的核心痛点,论文未涉及。
- 实时性与精度的平衡:论文的推理速度是在RTX3090上测得的,而实际工程场景中,红外预警系统通常采用嵌入式边缘设备,如何在极低算力下保持性能,是论文未解决的工程挑战。
分阶段一句话核心总结
小白一句话总结
这篇论文给红外图像里找又小又暗的目标设计了一套更精准的「打分规则」和一个简单好用的「望远镜」,能比之前的方法更快、更准地找到目标,唯一的小缺点是偶尔会把小光点错认成目标。
硕士一句话总结
这篇论文针对红外小目标检测任务中IoU类损失对目标尺度和位置不敏感的问题,提出了尺度与位置敏感的SLS损失函数,并基于原生UNet设计了轻量化的多尺度预测头网络MSHNet,在主流数据集上实现了SOTA的检测性能,同时兼具优异的推理速度和极低的计算量,且损失函数具有良好的泛化性。
博士一句话总结
这篇论文打破了红外小目标检测领域依赖复杂网络结构提升性能的固有范式,从损失函数的监督信号本质出发,提出了同时具备尺度与位置敏感性的SLS通用损失函数,结合极简的多尺度监督网络实现了性能与效率的双重SOTA,不仅为IRSTD领域提供了新的研究思路,其针对小目标梯度消失问题的损失函数设计也可拓展至各类小目标密集预测任务,具有极高的学术价值与工程应用潜力。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 8
8 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)