基于MPC模型预测车辆轨迹跟踪控制(横向+纵向MPC_双PID)联合仿真
🔥 内容介绍
一、车辆轨迹跟踪控制的背景与挑战
随着智能交通技术的发展,车辆轨迹跟踪控制成为自动驾驶领域的关键技术之一。精确的轨迹跟踪对于保障行车安全、提高交通效率至关重要。然而,车辆在实际行驶过程中面临诸多挑战:
-
复杂行驶环境:道路条件复杂多变,包括弯道、坡度、路面摩擦系数变化等,同时还可能受到其他车辆、行人等交通参与者的影响。这些因素增加了车辆准确跟踪预定轨迹的难度。
-
车辆动力学复杂性:车辆是一个复杂的动力学系统,其运动受到多个因素的耦合影响,如车辆质量、惯性、轮胎特性等。车辆的横向和纵向运动相互关联,传统的简单控制方法难以全面考虑这些复杂因素,实现精确的轨迹跟踪。
-
实时性要求高:自动驾驶车辆需要实时响应各种变化,及时调整行驶轨迹。这就要求控制算法不仅要具备高精度的跟踪能力,还要能够快速计算并输出控制指令。
二、五次多项式规划原理
-
纵向双 PID 控制在车辆中的应用:在车辆纵向控制中,通常涉及两个 PID 控制器,一个用于速度控制,另一个用于加速度控制。速度 PID 控制器根据期望速度与实际速度的误差,通过调整发动机扭矩或制动压力来改变车辆速度。比例环节根据当前速度误差快速响应,积分环节消除稳态误差,微分环节则根据速度误差的变化率提前调整控制量,防止速度超调。加速度 PID 控制器则以期望加速度与实际加速度的误差为输入,进一步微调控制输出,使车辆的加速度变化更加平稳。这种双 PID 控制结构能够更精确地控制车辆的纵向运动,使其更好地跟踪由五次多项式规划生成的纵向参考轨迹。
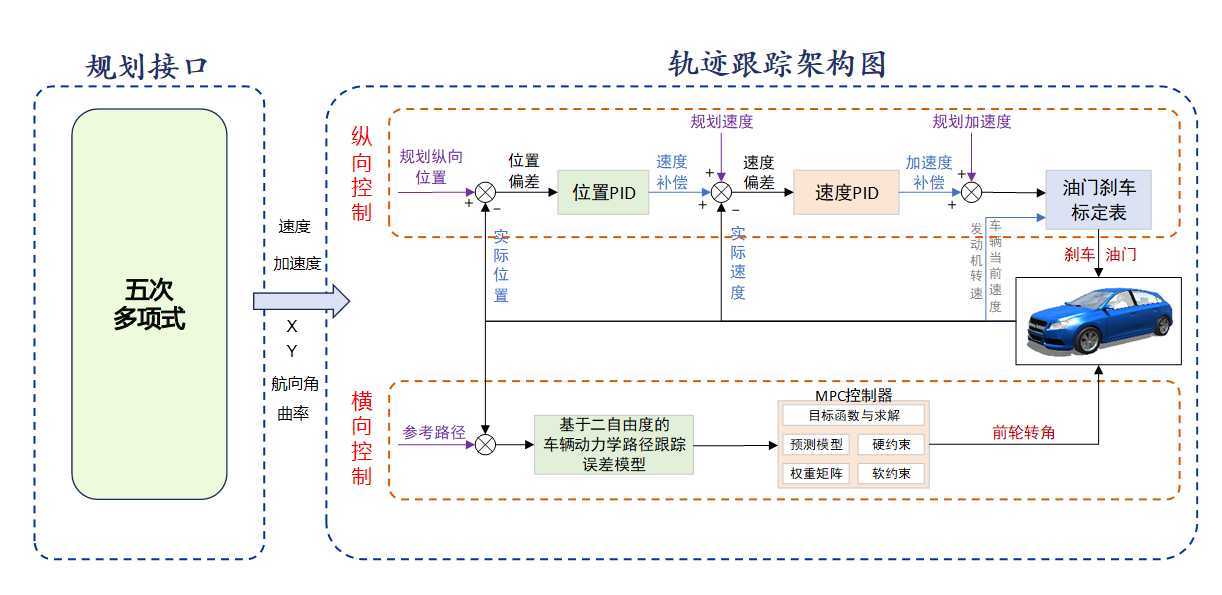
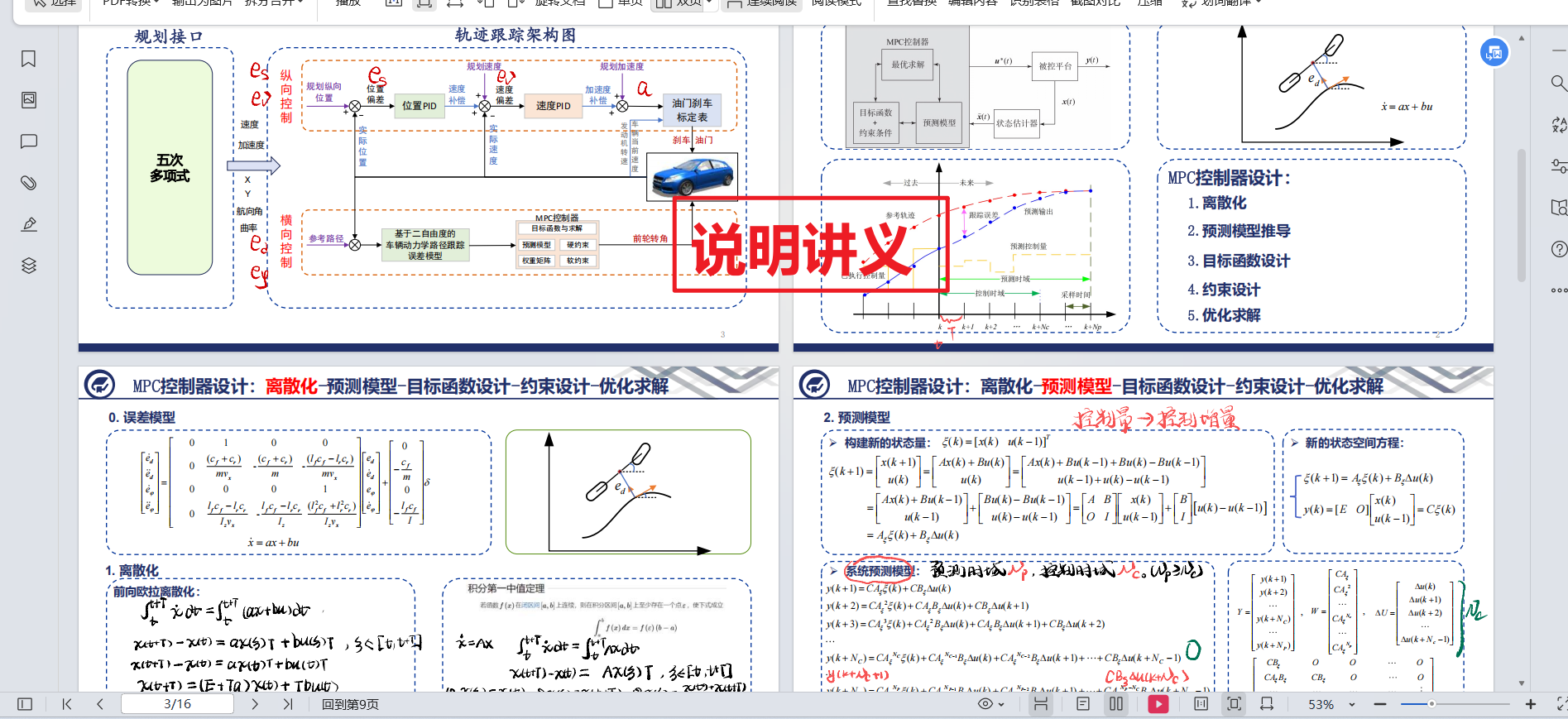
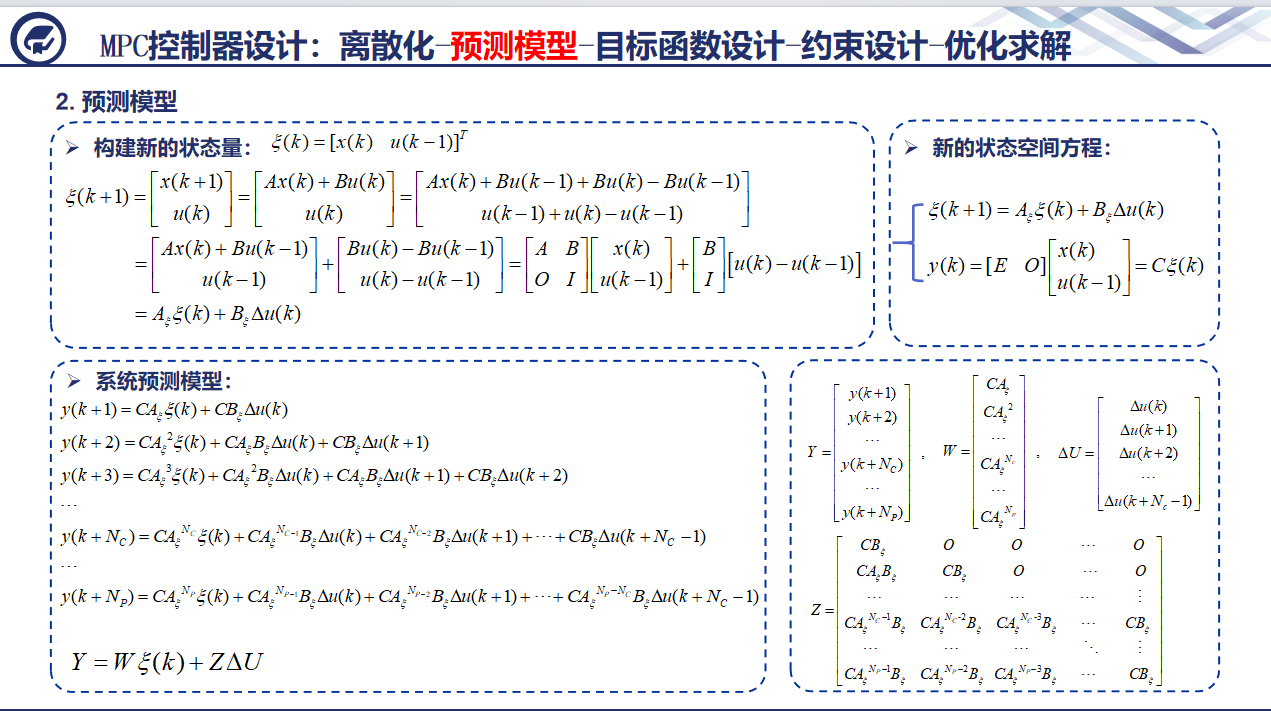
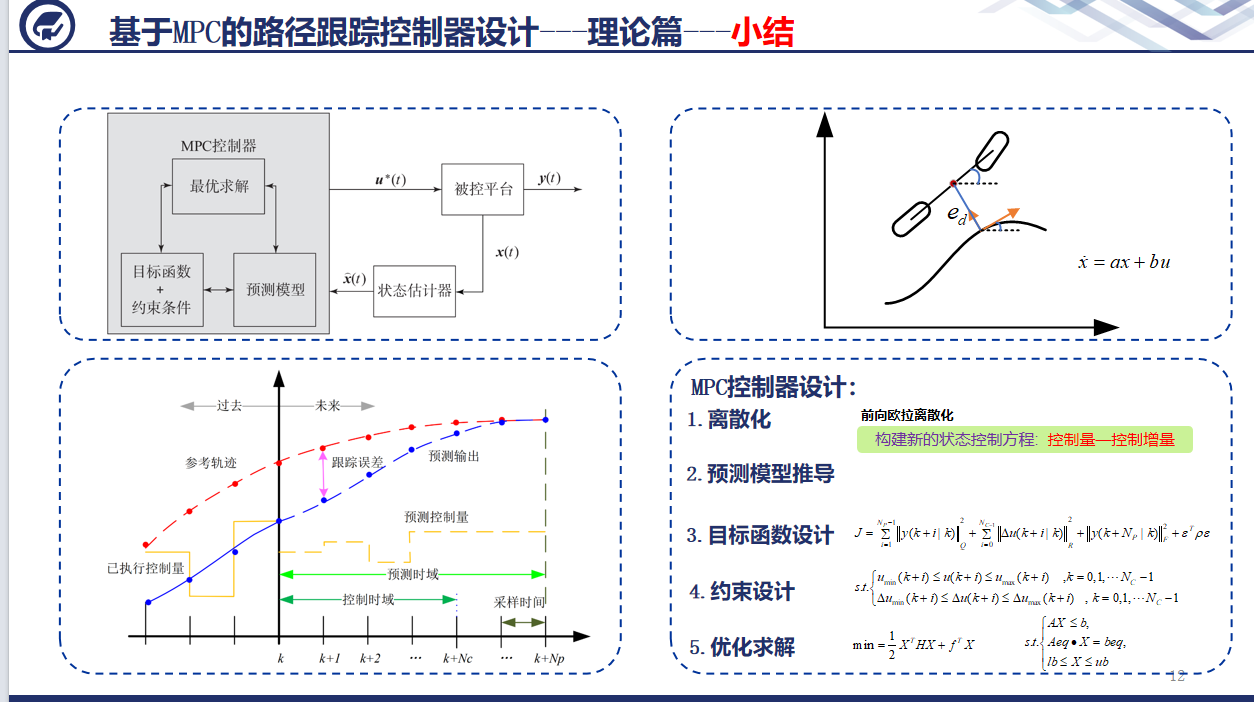
四、MPC 横向控制器原理
-
MPC 基本概念:模型预测控制(MPC)是一种基于模型的先进控制策略,其核心思想是利用系统的预测模型预估系统未来的行为,在每个控制周期内求解一个优化问题,以确定最优的控制输入。MPC 具有滚动优化和反馈校正的特点,能够处理多变量、有约束的复杂系统。
-
MPC 在车辆横向控制中的应用:
-
模型建立:首先建立车辆横向动力学模型,描述车辆的横向位置、横摆角、侧向速度等状态与转向角等控制输入之间的关系。该模型可以基于车辆的物理特性和运动学原理构建。
-
预测未来状态:在每个控制周期,MPC 根据当前车辆的横向状态和转向角等控制输入,利用模型预测车辆在未来多个时刻的横向状态,如横向位移、横摆角速度等。
-
优化控制输入:定义一个性能指标,通常包括跟踪误差(实际横向轨迹与期望轨迹的偏差)最小化、控制输入变化最小化等。MPC 通过求解优化问题,在满足车辆动力学约束(如最大转向角限制、侧向力限制等)的前提下,找到使性能指标最优的转向角序列。
-
滚动优化与反馈校正:实际应用中,MPC 只将优化得到的转向角序列中的第一个值应用到车辆上,在下一个控制周期,重复上述过程,重新进行预测和优化。同时,通过实时测量车辆的实际横向状态,与预测状态进行比较,对预测模型进行反馈校正,以提高预测的准确性,从而实现车辆精确的横向轨迹跟踪。
-
五、车辆状态输出模块原理
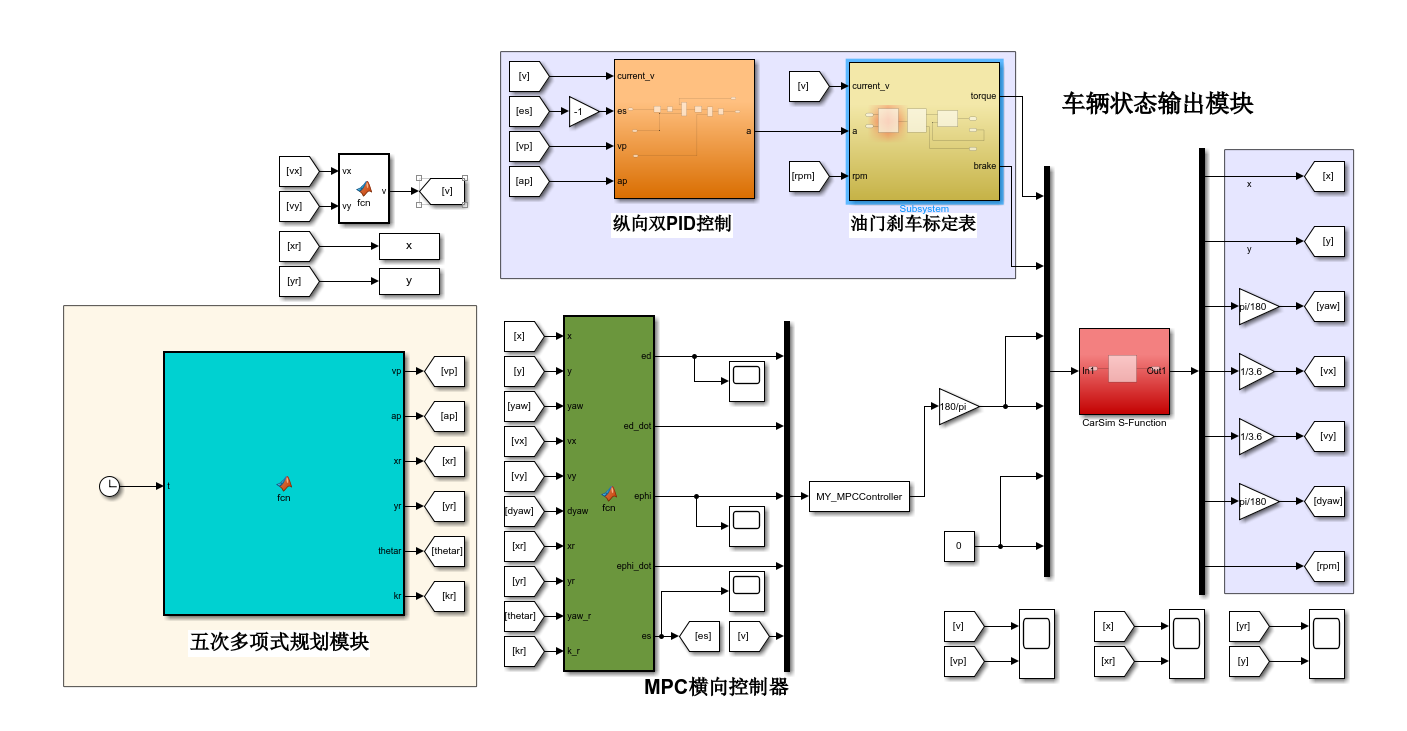
车辆状态输出模块负责收集和处理车辆各个传感器的数据,实时获取车辆的各种状态信息,如位置、速度、加速度、转向角、横摆角等。这些状态信息不仅是 MPC 和双 PID 控制器进行控制决策的依据,也是评估车辆轨迹跟踪性能的重要指标。通过将车辆的实际状态输出与期望轨迹进行对比,可以直观地了解车辆的跟踪效果,为进一步优化控制算法提供数据支持。例如,在联合仿真中,可以通过车辆状态输出模块实时监测车辆是否准确跟踪五次多项式规划生成的轨迹,以及横向和纵向控制的效果是否满足要求,从而对控制参数进行调整和优化。
通过将五次多项式规划、纵向双 PID 控制、MPC 横向控制器以及车辆状态输出模块相结合,实现车辆在横向和纵向的精确轨迹跟踪控制。这种联合控制策略充分发挥了各部分的优势,能够更好地应对车辆行驶过程中的复杂情况,提高轨迹跟踪的准确性和稳定性。在联合仿真中,可以对整个控制过程进行模拟和验证,优化控制参数,为实际车辆的自动驾驶系统提供可靠的技术支持。
⛳️ 运行结果
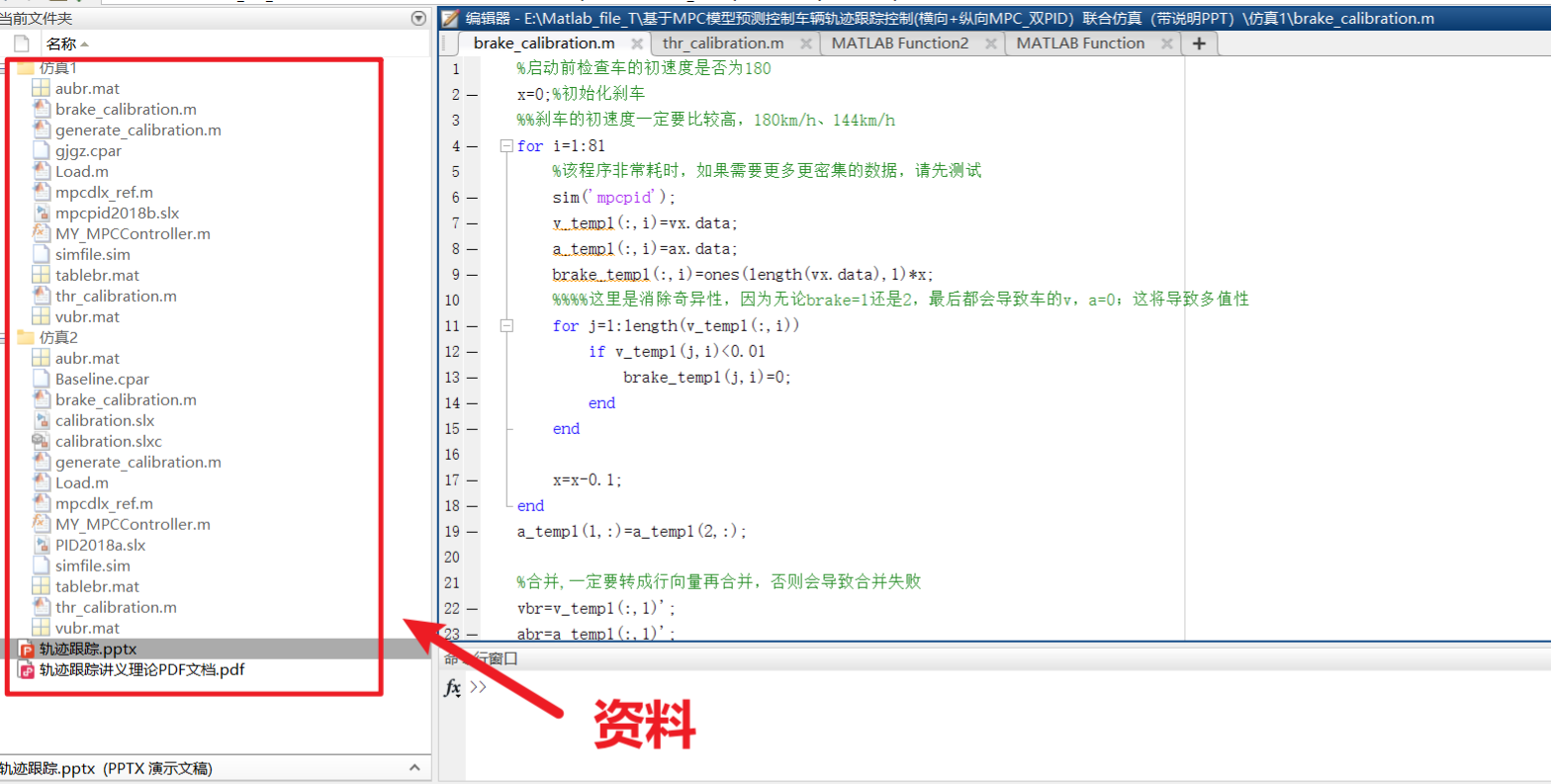
📣 部分代码
🎈 部分理论引用网络文献,若有侵权联系博主删除
往期回顾扫扫下方二维码


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 4
4 0
0- 0



 已为社区贡献191条内容
已为社区贡献191条内容

所有评论(0)