【SCI复现】基于MPC模型预测+事件触发的AUV编队协同路径跟踪Matlab程序
🔥 内容介绍
一、AUV 编队协同路径跟踪的背景与挑战
自主水下航行器(AUV)编队在海洋探测、海洋资源开发、水下监测等领域具有重要应用。例如,在海洋科考中,多艘 AUV 编队可以从不同角度对特定海域进行全方位观测;在水下管道检测任务里,AUV 编队能够协同完成长距离管道的检测工作。然而,实现 AUV 编队协同路径跟踪面临诸多挑战:
-
复杂海洋环境:海洋环境复杂多变,水流、海浪、水温、盐度等因素都会对 AUV 的运动产生影响。例如,强水流可能使 AUV 偏离预定路径,增加了路径跟踪的难度。
-
通信受限:水下通信存在带宽低、信号衰减严重、时延大等问题。这使得 AUV 之间以及 AUV 与控制中心之间的信息交互受到限制,难以实时获取完整的系统状态信息,给协同控制带来挑战。
-
多智能体协同要求高:AUV 编队作为多智能体系统,需要各 AUV 之间密切协同,保持特定的相对位置关系,以完成共同的任务。但不同 AUV 的动力学特性可能存在差异,且在运动过程中可能受到不同程度的干扰,如何实现一致性的协同路径跟踪是关键问题。
二、MPC 模型预测控制原理
-
MPC 基本概念:模型预测控制(MPC)是一种基于模型的先进控制策略。它的核心思想是利用系统的预测模型来预估系统未来的行为,在每个控制周期内求解一个优化问题,以确定最优的控制输入。MPC 具有滚动优化和反馈校正的特点,能够处理多变量、有约束的复杂系统。
-
MPC 在 AUV 编队中的应用:
-
模型建立:首先需要建立 AUV 的动力学模型,描述 AUV 在水下的运动状态,如位置、速度、加速度等与控制输入(如推进器的推力、舵角等)之间的关系。同时,考虑 AUV 编队中各成员之间的相对位置关系,构建编队的整体模型。
-
预测未来状态:在每个控制周期,MPC 根据当前的系统状态和控制输入,利用模型预测 AUV 在未来多个时刻的状态,包括位置、姿态等。
-
优化控制输入:定义一个性能指标,如跟踪误差(实际路径与期望路径的偏差)最小化、控制输入变化最小化等。MPC 通过求解优化问题,在满足系统约束(如推进器推力限制、AUV 的运动学和动力学约束等)的前提下,找到使性能指标最优的控制输入序列。
-
滚动优化与反馈校正:实际应用中,MPC 只将优化得到的控制输入序列中的第一个值应用到系统中,在下一个控制周期,重复上述过程,重新进行预测和优化。同时,通过实时测量 AUV 的实际状态,与预测状态进行比较,对预测模型进行反馈校正,以提高预测的准确性。
-
三、事件触发机制原理
-
事件触发概念:传统的控制策略通常采用时间触发方式,即按照固定的时间间隔进行采样和控制计算。而事件触发机制则是根据系统的状态变化或特定事件的发生来决定是否进行采样和控制更新。只有当系统状态满足预先设定的触发条件时,才会触发控制动作,这样可以减少不必要的采样和计算,降低系统的通信和计算负担。
-
事件触发在 AUV 编队中的应用:在 AUV 编队中,事件触发条件可以基于 AUV 的跟踪误差、相对位置误差等。例如,当某 AUV 的实际路径与期望路径的偏差超过一定阈值,或者 AUV 之间的相对位置偏差超出允许范围时,触发事件,进行控制更新。通过合理设计事件触发条件,可以在保证 AUV 编队协同路径跟踪性能的前提下,有效减少通信量和计算资源的消耗,特别适用于水下通信受限和计算资源有限的 AUV 系统。
四、MPC 与事件触发结合的优势
-
提高控制效率:事件触发机制减少了不必要的控制更新,使得 MPC 能够更集中地处理关键状态变化,提高了控制的针对性和效率。同时,降低了通信和计算负担,有助于在水下通信受限和计算资源有限的情况下,维持 AUV 编队的稳定运行。
-
增强协同性能:MPC 的滚动优化和反馈校正能力与事件触发的灵活触发机制相结合,能够更好地应对 AUV 编队在复杂海洋环境中的各种干扰和不确定性,使各 AUV 更准确地跟踪期望路径,保持良好的协同一致性。
五、无人船编队、无人车编队相关拓展
-
无人船编队(USV):无人船编队在水上运输、海洋监测、港口作业等方面有广泛应用。与 AUV 编队类似,无人船编队也面临复杂的水面环境(如风浪、水流等)和通信问题。MPC 模型预测控制同样可以用于无人船编队的路径规划与协同控制,通过建立无人船的动力学模型,预测未来状态并优化控制输入。事件触发机制也可根据无人船的位置误差、航向误差等设定触发条件,减少不必要的通信和计算,提高编队的协同效率。
-
无人车编队:无人车编队在智能交通、物流配送等领域具有重要意义。在道路行驶过程中,无人车需要应对复杂的路况、交通规则以及其他车辆和行人的干扰。MPC 模型预测控制能够考虑无人车的动力学和运动学约束,结合地图信息和交通规则,规划出最优路径并协同控制各无人车保持编队行驶。事件触发机制可基于无人车之间的距离、速度差等状态信息设定触发条件,实现高效的协同控制,同时降低通信和计算资源的消耗。
通过将 MPC 模型预测控制与事件触发机制相结合,并拓展应用于无人船编队和无人车编队,能够有效提高多智能体系统在复杂环境下的协同路径跟踪性能,具有广泛的应用前景。在 MATLAB 环境中,可以方便地对这些控制策略进行建模、仿真和验证,优化控制参数,以满足实际应用的需求。
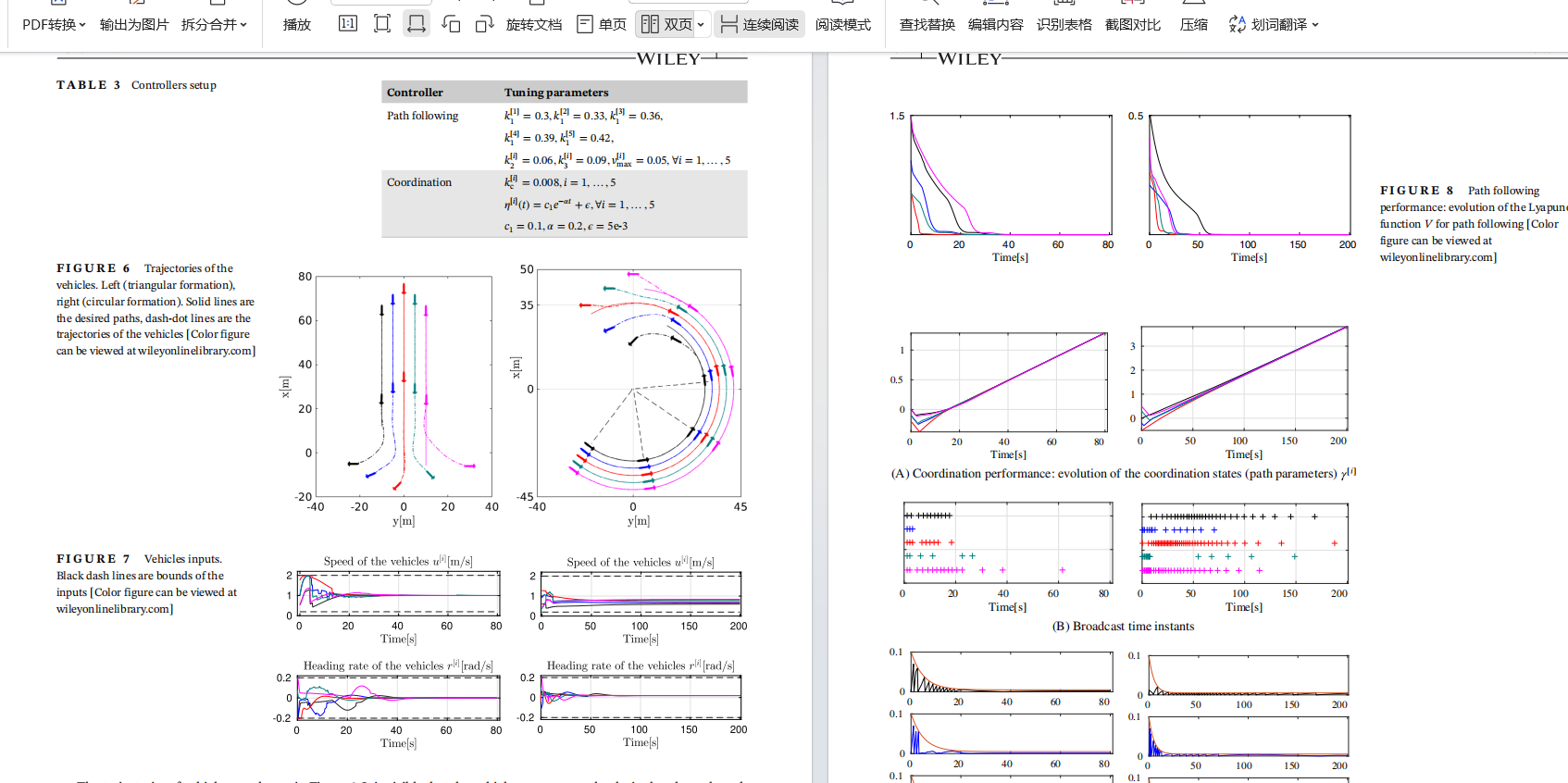
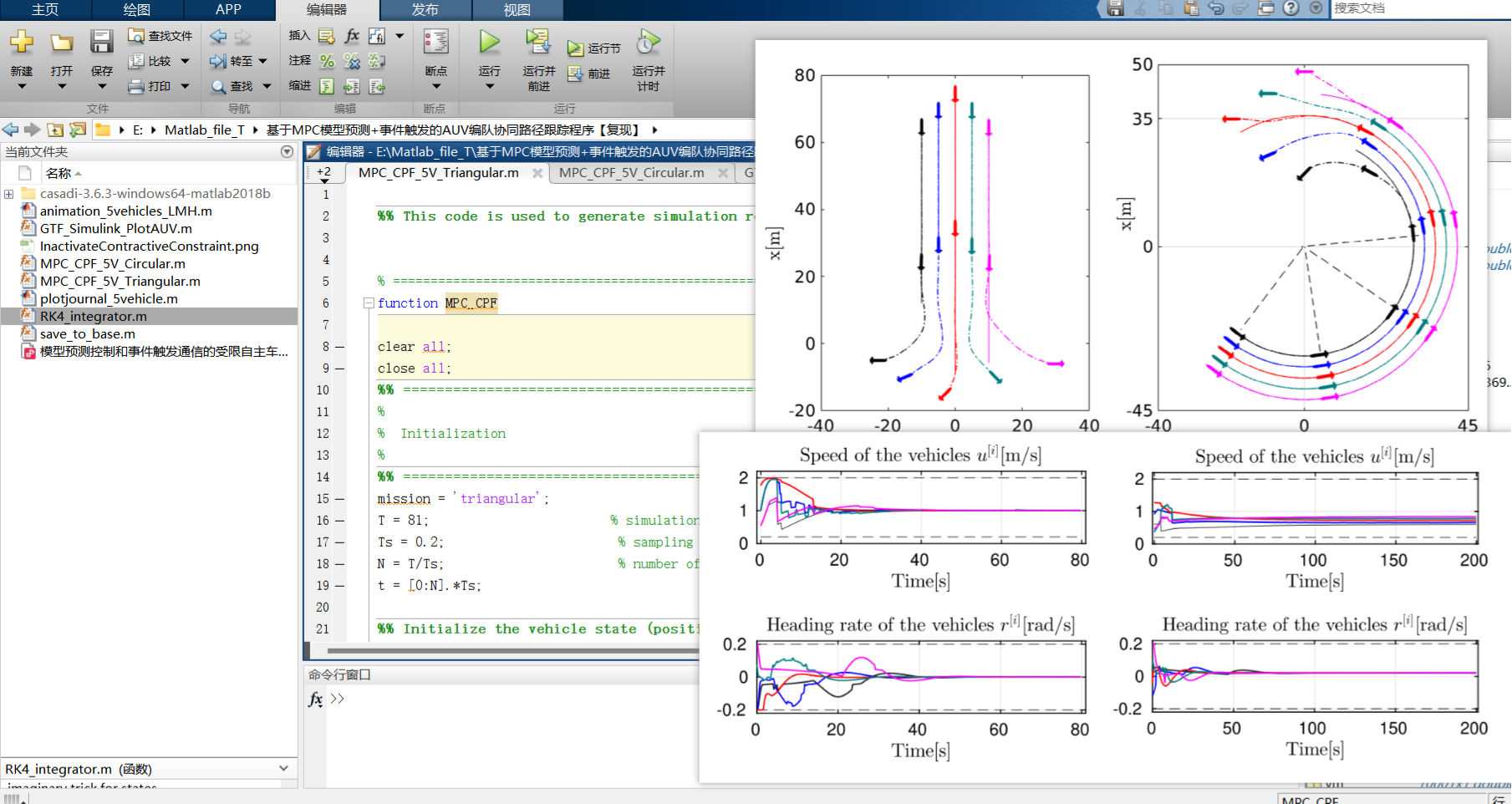
⛳️ 运行结果
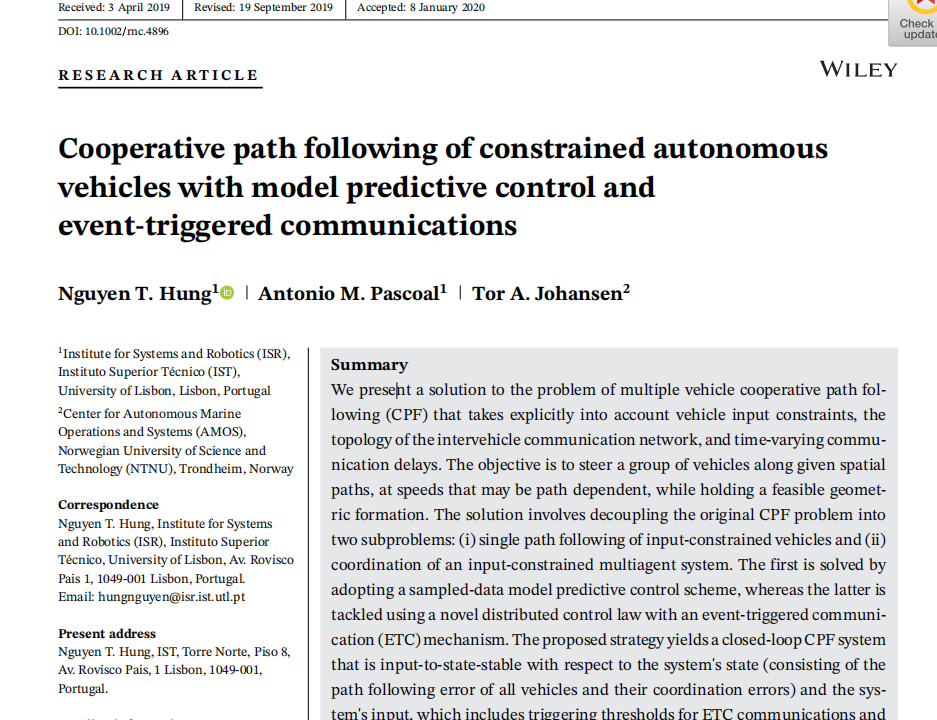
🔗 参考文献
Cooperative path following of constrained autonomous vehicles with model predictive control and event-triggered communications
🎈 部分理论引用网络文献,若有侵权联系博主删除

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 6
6 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)