基于.NET 6和WPF的OpenCVSharp与ReactiveUI学习实践:3D点云数据处...
这是一个使用.net 6 基于wpf 、OpencvSharp(opencv的.net wrapper)、ReactiveUI等开发的自用工具,主要用来做ReactiveUI与OpencvSharp学习过程中的尝试以及opencv算子参数的调试等,该程序还可以显示3D点云数据(目前程序中的点云数据是由格雷码条纹拍摄的照片反算生成了,还可以导入标准的3d格式的文件stl、obj、objz、ply、3ds、lwo、off),还包含有opencv调用yolov4深度学习模型实现目标识别, 本源码内包含部分解释
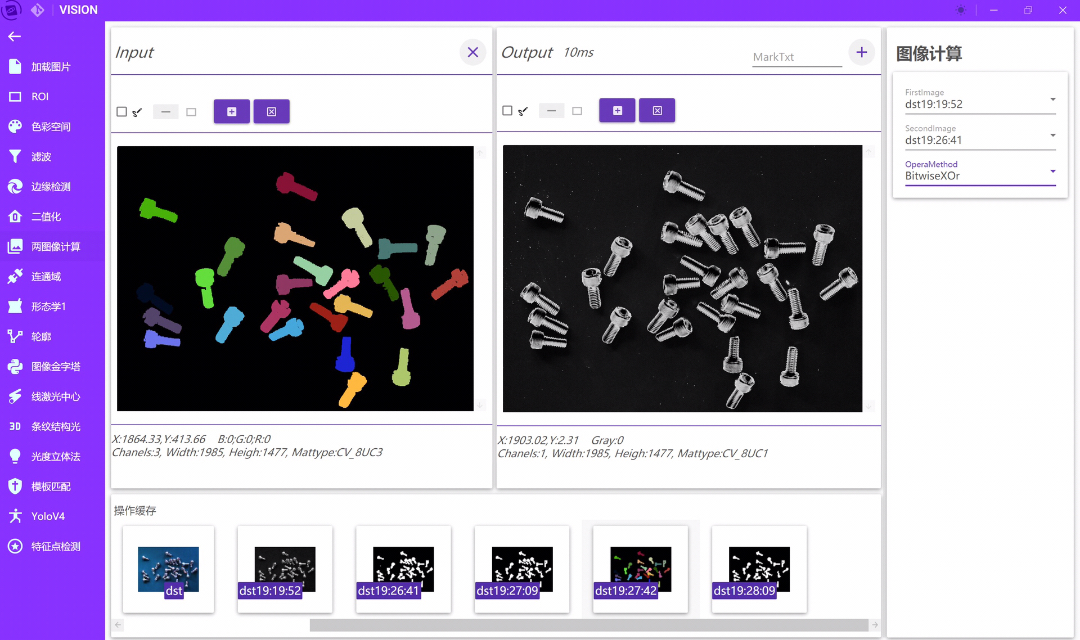
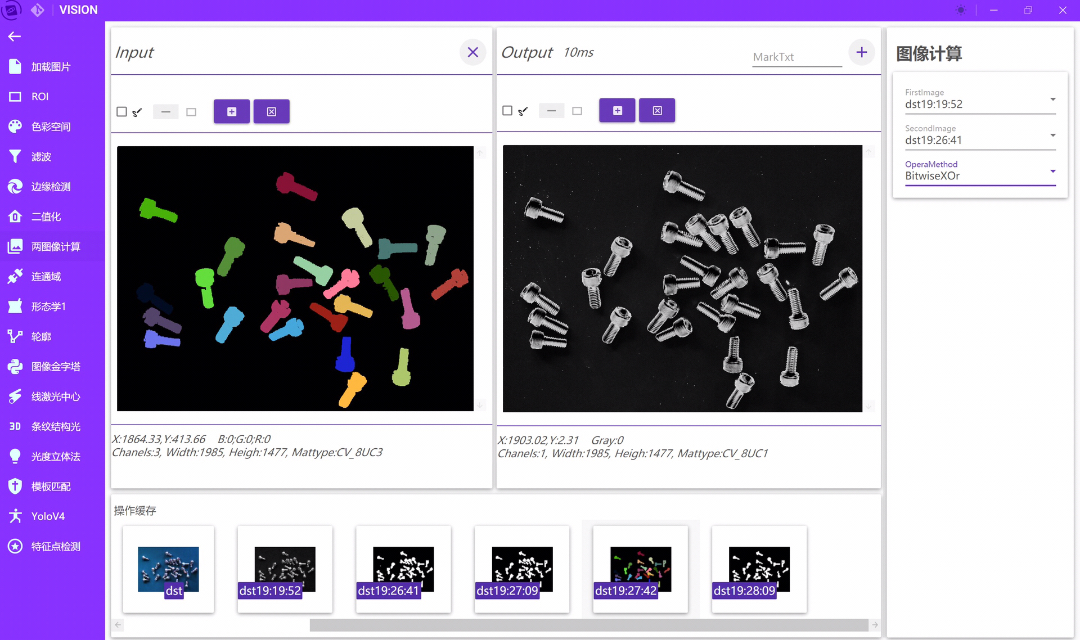
最近在折腾一个自用工具,把ReactiveUI、OpenCVSharp这些技术栈揉在一起玩。这玩意儿主要用来快速验证图像处理算法,顺便当个3D点云查看器。界面虽然糙了点,但胜在能实时调参——毕竟用滑块控制卷积核大小可比改代码重新编译舒坦多了。
先看ReactiveUI和WPF的化学反应。ViewModel里定义个图像处理命令长这样:
public ReactiveCommand<Unit, Mat> ProcessImage { get; }
// 构造函数里初始化
ProcessImage = ReactiveCommand.CreateFromTask(async () =>
{
using var src = new Mat(ImagePath);
return await Task.Run(() => _opencvService.CannyEdgeDetect(src));
});UI绑定直接用WhenAnyValue监听参数变化触发处理。这种响应式绑定比传统事件驱动清爽多了,特别是处理多个参数联动时,再也不用写那些if (e.PropertyName == "XXX")的样板代码。
图像处理核心部分用OpenCVSharp封装了个服务类。比如Canny边缘检测的实现:
public Mat CannyEdgeDetect(Mat src, int threshold1 = 50, int threshold2 = 150)
{
var edges = new Mat();
Cv2.Canny(src, edges, threshold1, threshold2);
// 调试时打印矩阵前10x10区域
if (DebugMode)
Console.WriteLine(edges[0..10, 0..10].Dump());
return edges;
}有意思的是阈值参数通过WPF滑块双向绑定,配合ReactiveUI的Throttle方法防止滑块拖动时高频触发计算。这种实时反馈对理解算法参数影响特别直观,比如把高斯模糊的kernelSize从5调到15,能肉眼看到图像从锐利到模糊的渐变过程。
这是一个使用.net 6 基于wpf 、OpencvSharp(opencv的.net wrapper)、ReactiveUI等开发的自用工具,主要用来做ReactiveUI与OpencvSharp学习过程中的尝试以及opencv算子参数的调试等,该程序还可以显示3D点云数据(目前程序中的点云数据是由格雷码条纹拍摄的照片反算生成了,还可以导入标准的3d格式的文件stl、obj、objz、ply、3ds、lwo、off),还包含有opencv调用yolov4深度学习模型实现目标识别, 本源码内包含部分解释
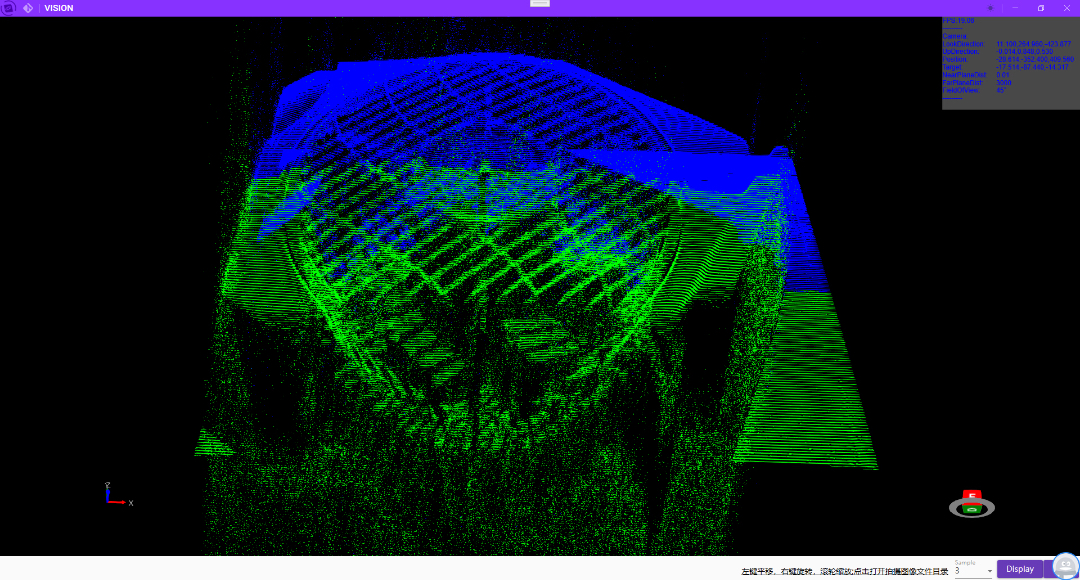
3D点云模块支持多种格式导入,其中格雷码解码生成点云的算法最有意思。核心是利用相位偏移公式计算深度:
var phaseMap = new Mat();
Cv2.PhaseShift(images, phaseMap, projectorResolution);
// 三角法计算三维坐标
for (int y = 0; y < phaseMap.Rows; y++) {
for (int x = 0; x < phaseMap.Cols; x++) {
var phase = phaseMap.At<double>(y, x);
var depth = baseline * focalLength / (phase + disparity);
points.Add(new Point3D(x, y, depth));
}
}这里有个坑是相位展开算法容易受环境光干扰,后来加了归一化处理才稳定。点云渲染用HelixToolkit实现,支持鼠标拖拽查看不同视角——虽然性能比不上专业软件,但用来验证算法足够了。
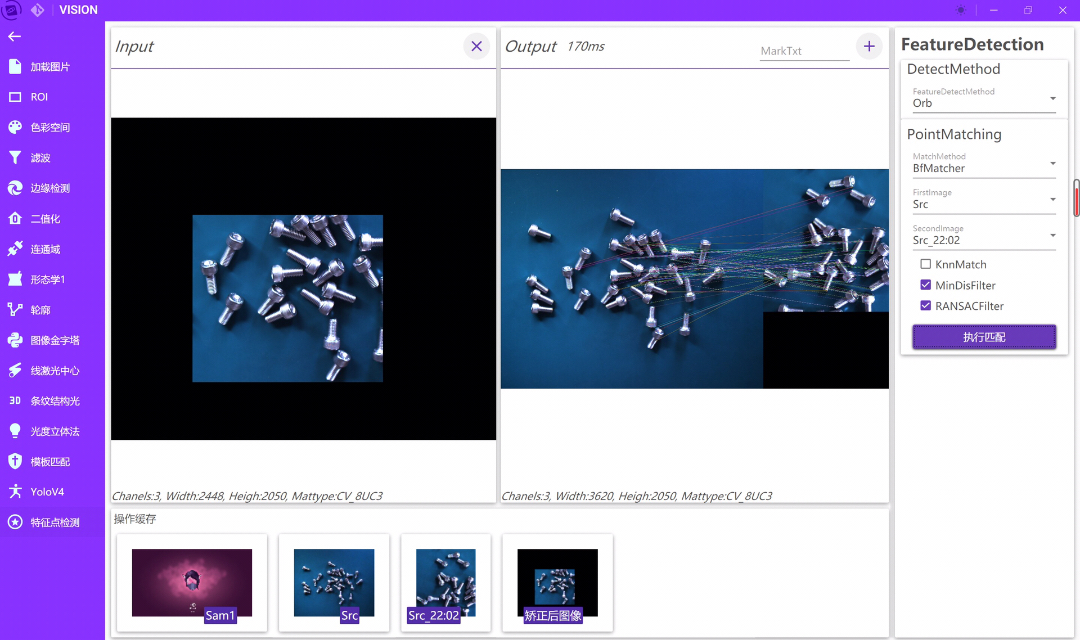
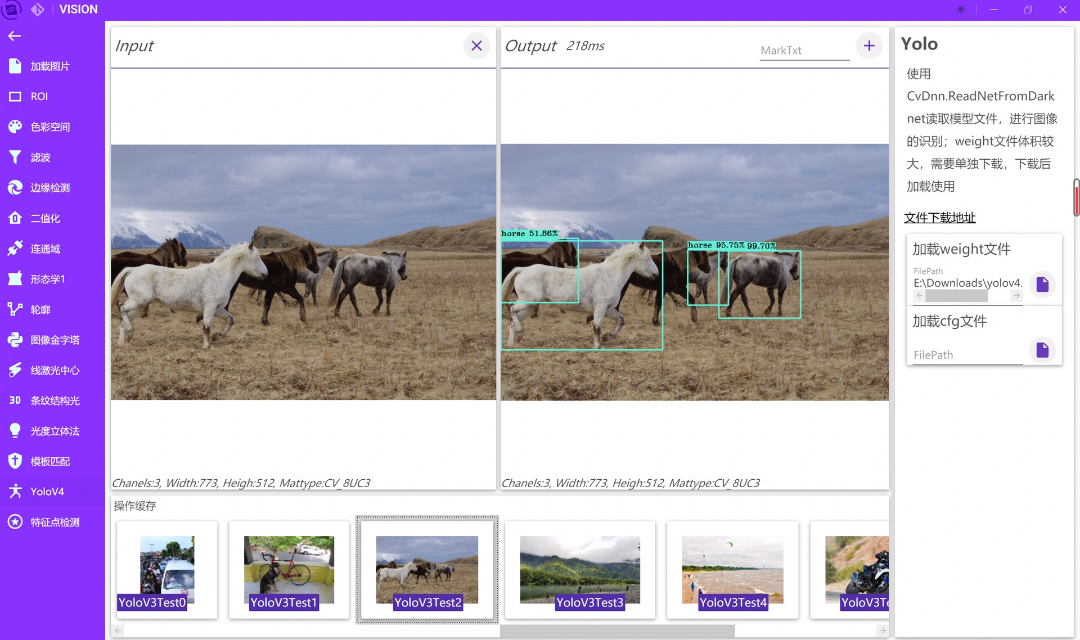
最后是YOLOv4集成部分。加载ONNX模型进行目标检测的代码比想象中简单:
using var net = CvDnn.ReadNetFromONNX("yolov4.onnx");
var blob = CvDnn.BlobFromImage(image, 1/255f, new Size(416, 416));
net.SetInput(blob);
var output = net.Forward();
ParseYoloOutput(output, image.Width, image.Height);但预处理和后处理才是重点。比如输入图像要归一化到0-1范围,输出层需要做非极大值抑制。这部分代码写了三个版本:同步阻塞版、Task.Run后台版、GPU加速版。实测发现对于640x480的图片,CPU版本处理需要200ms,而用CUDA加速后直接飙到30ms——果然该让显卡干的活就别为难CPU。
源码里到处散落着//TODO: 这里需要重构的注释,充分暴露了边学边写的开发过程。比如最开始用事件总线传图像数据,后来全改成ReactiveUI的MessageBus,消息处理流畅度直接提升一个level。这种渐进式优化的体验,比一开始就设计完美架构要有趣得多。
项目还在持续魔改中,下一步打算把点云配准算法整合进来。毕竟,能把自己写的算法变成可视化工具,调试的时候连摸鱼都变得理直气壮了呢(笑)。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)