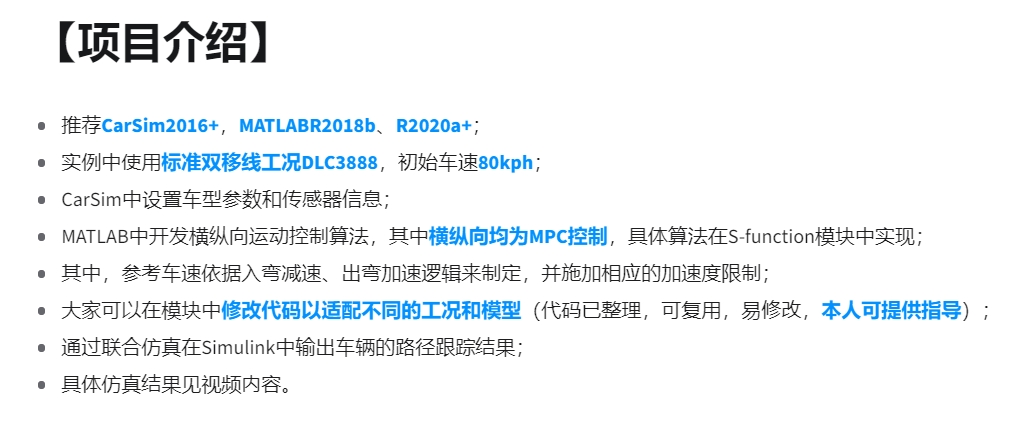
轨迹跟踪:CarSim与MATLAB联合仿真中的模型预测控制横纵向协同控制
轨迹跟踪CarSimMATLAB联合仿真模型预测控制横纵向协同控制 【打包文件包括】 -CarSim车型文件.cpar -MPC车速跟踪算法MPC_LongControl_Dyn_Alg.m -MPC横向路径跟踪算法MPC_LateralControl_Dyn_Alg_DLC3888.m -Simulink系统文件MPC_LateralControl_Dyn.slx -自己录制的CarSimMATLAB联合仿真一步步操作流程
最近在做轨迹跟踪相关的项目,用到了CarSim和MATLAB的联合仿真,还涉及到模型预测控制的横纵向协同控制,感觉挺有意思的,来和大家分享一下。
联合仿真文件一览
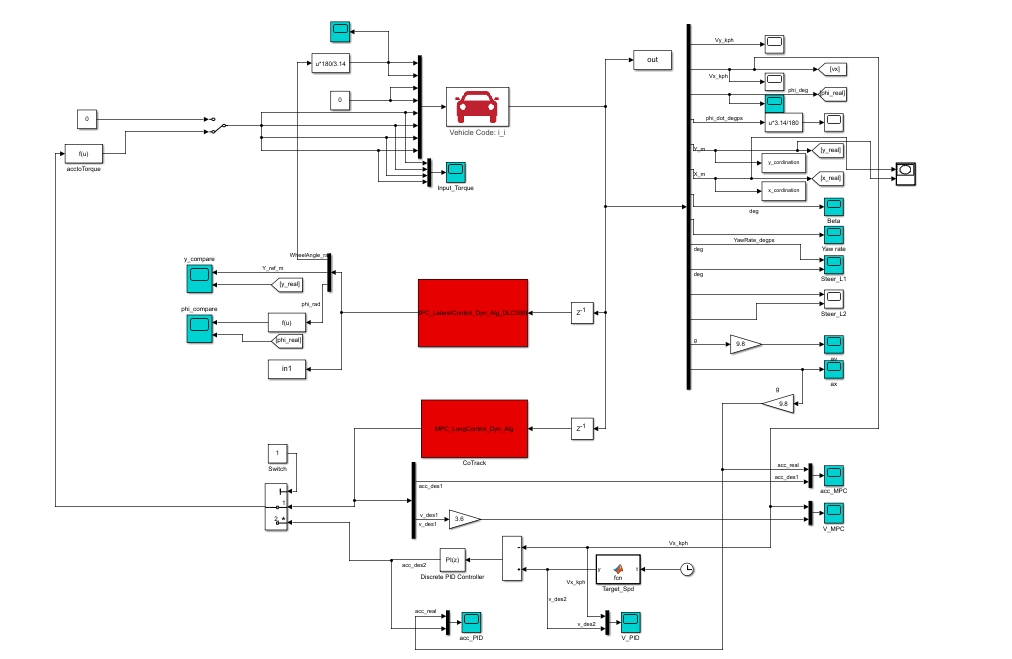
这次的打包文件里内容还挺丰富的。有CarSim车型文件.cpar ,这可是整个仿真的基础载体,定义了车辆的各种参数。还有MPC车速跟踪算法MPCLongControlDynAlg.m ,以及MPC横向路径跟踪算法MPCLateralControlDynAlgDLC3888.m ,这两个算法文件可是实现控制的关键代码。另外还有Simulink系统文件MPCLateralControl_Dyn.slx ,它把各种模块组合起来,形成一个完整的控制系统。当然,还有自己录制的CarSimMATLAB联合仿真一步步操作流程,对于像我这样刚接触的人来说,简直是救星。
MPC车速跟踪算法分析
先看看MPCLongControlDyn_Alg.m 这个文件。这里面的代码逻辑是围绕着如何根据车辆当前状态和目标车速来调整车速。
function [u, info] = MPC_LongControl_Dyn_Alg(x, ref)
% MPC_LongControl_Dyn_Alg 模型预测控制车速跟踪算法
% x: 当前车辆状态 [车速, 加速度]
% ref: 目标车速
% 一些参数设置
N = 10; % 预测时域
Q = [10 0; 0 1]; % 状态权重矩阵
R = 1; % 控制输入权重矩阵
% 构建预测模型
A = [1 1; 0 1];
B = [0; 1];
% 初始化预测状态和控制输入
X_pred = zeros(2, N+1);
U_pred = zeros(1, N);
X_pred(:,1) = x;
% 预测循环
for k = 1:N
X_pred(:,k+1) = A*X_pred(:,k) + B*U_pred(k);
end
% 目标函数
J = 0;
for k = 1:N
J = J + (X_pred(1,k) - ref)^2*Q(1,1) + U_pred(k)^2*R;
end
% 求解最优控制输入
[U, info] = quadprog(eye(1)*R, zeros(1,N), [], [], [], [], zeros(1,N), [], [], optimoptions('quadprog','Display','off'));
u = U(1);
end这段代码里,首先定义了预测时域N、状态权重矩阵Q和控制输入权重矩阵R。然后构建了一个简单的车辆动力学预测模型A和B。通过预测循环,计算出预测时域内的车辆状态。接着定义目标函数J,它衡量了预测状态与目标车速的偏差以及控制输入的大小。最后使用quadprog函数求解最优控制输入u,让车辆尽可能地跟踪目标车速。
MPC横向路径跟踪算法分析
再瞧瞧MPCLateralControlDynAlgDLC3888.m 。这个算法主要是处理车辆的横向路径跟踪。
function [u, info] = MPC_LateralControl_Dyn_Alg_DLC3888(x, ref)
% MPC_LateralControl_Dyn_Alg_DLC3888 模型预测控制横向路径跟踪算法
% x: 当前车辆状态 [横向位置, 横向速度, 横摆角速度]
% ref: 目标路径点
% 参数设置
N = 10; % 预测时域
Q = [10 0 0; 0 1 0; 0 0 1]; % 状态权重矩阵
R = 1; % 控制输入权重矩阵
% 构建预测模型
A = [1 1 0; 0 1 0; 0 0 1];
B = [0; 1; 0];
% 初始化预测状态和控制输入
X_pred = zeros(3, N+1);
U_pred = zeros(1, N);
X_pred(:,1) = x;
% 预测循环
for k = 1:N
X_pred(:,k+1) = A*X_pred(:,k) + B*U_pred(k);
end
% 目标函数
J = 0;
for k = 1:N
J = J + (X_pred(1,k) - ref)^2*Q(1,1) + (X_pred(2,k))^2*Q(2,2) + (X_pred(3,k))^2*Q(3,3) + U_pred(k)^2*R;
end
% 求解最优控制输入
[U, info] = quadprog(eye(1)*R, zeros(1,N), [], [], [], [], zeros(1,N), [], [], optimoptions('quadprog','Display','off'));
u = U(1);
end这段代码和车速跟踪算法类似,也是先设置参数,构建预测模型。通过预测循环得到预测时域内的车辆横向状态,定义目标函数来综合考虑横向位置偏差、横向速度和横摆角速度的影响以及控制输入大小。最后求解最优控制输入,让车辆沿着目标路径行驶。
轨迹跟踪CarSimMATLAB联合仿真模型预测控制横纵向协同控制 【打包文件包括】 -CarSim车型文件.cpar -MPC车速跟踪算法MPC_LongControl_Dyn_Alg.m -MPC横向路径跟踪算法MPC_LateralControl_Dyn_Alg_DLC3888.m -Simulink系统文件MPC_LateralControl_Dyn.slx -自己录制的CarSimMATLAB联合仿真一步步操作流程
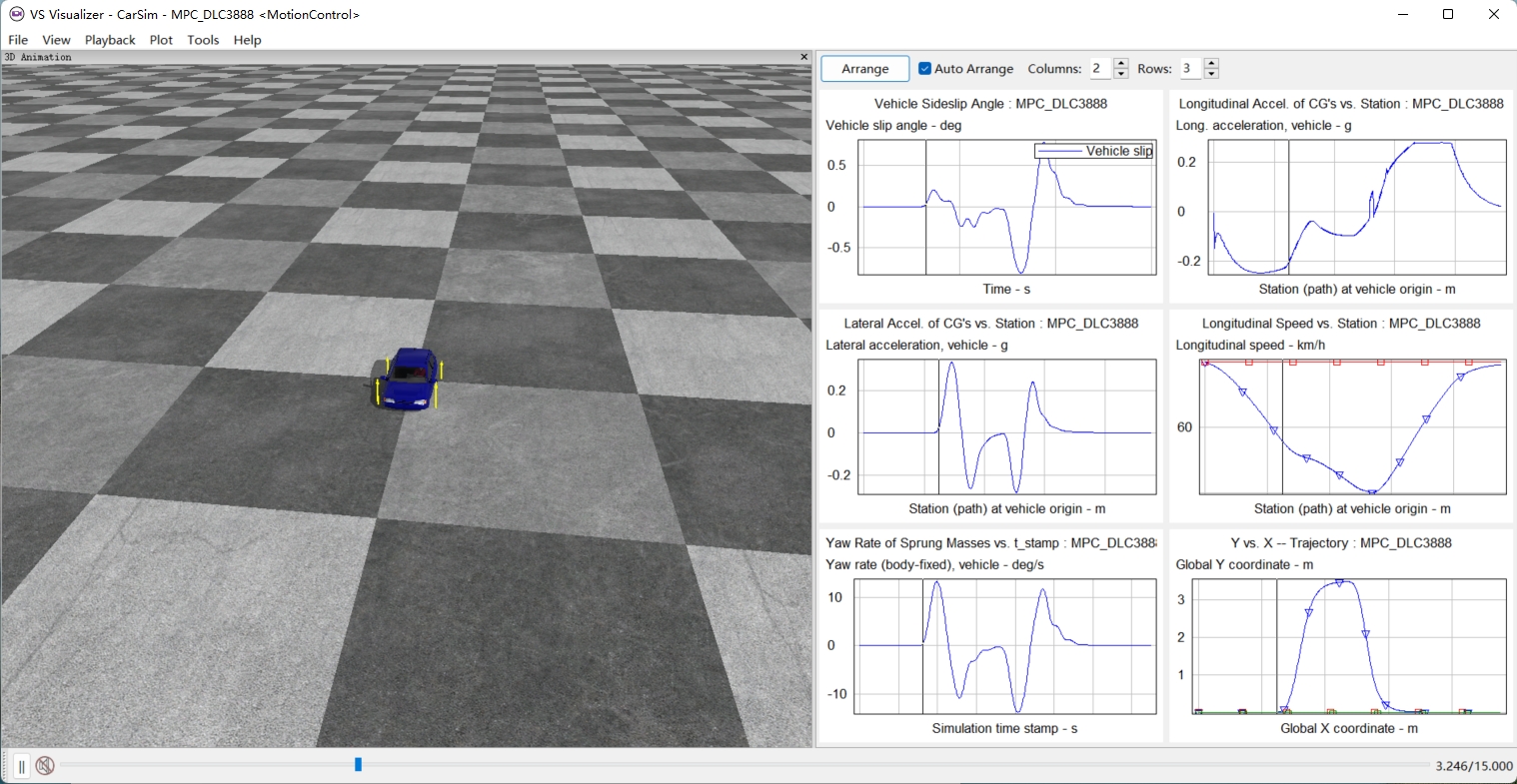
通过这两个算法的协同作用,车辆能够在横纵向实现较为精确的轨迹跟踪。结合CarSim和MATLAB的联合仿真,能直观地看到车辆在各种工况下的表现,为进一步优化控制策略提供了很好的平台。大家要是对这方面也感兴趣,不妨试试这些代码,一起探索轨迹跟踪的奥秘!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 5
5 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)