自动驾驶Prescan和Simulink联合仿真LDW模型:车道偏离预警探索
自动驾驶Prescan 和simulink 联合仿真LDW模型,车道偏离预警
最近一直在研究自动驾驶中的车道偏离预警(LDW)模型,并且尝试通过Prescan和Simulink进行联合仿真,今天就来和大家分享一下这个过程中的一些有趣发现和经验。
为什么要做LDW模型?
在自动驾驶领域,车道偏离是一个很关键的安全问题。当车辆在行驶过程中偏离了正常车道,可能会导致与其他车辆或障碍物发生碰撞等危险情况。所以,准确的车道偏离预警系统对于保障行车安全至关重要。
Prescan简介
Prescan是一款用于自动驾驶和ADAS系统开发的仿真平台。它提供了丰富的交通场景建模功能,可以模拟各种复杂的道路、车辆和交通状况。
在我们的项目中,使用Prescan来构建真实的道路场景。比如,我们可以轻松创建不同类型的道路,像直线道路、弯道、环岛等。下面是一段简单的Prescan道路创建代码示例(这里只是示意,实际代码会更复杂):
road = prescan.road('MyRoad');
road.addLane(1, 3.5); % 添加一条车道,车道宽度3.5米
road.addLane(2, 3.5); % 再添加一条车道这段代码的意思就是创建了一个名为"MyRoad"的道路对象,并添加了两条宽度为3.5米的车道。Prescan的强大之处在于它可以精确地定义道路的各种参数,为后续的仿真提供非常逼真的环境。
Simulink简介
Simulink则是用于动态系统建模、仿真和分析的工具。我们利用它来构建车道偏离预警的算法模型。
在Simulink中,我们需要处理一些关键的模块。比如,图像传感器模块用于获取车辆前方道路的图像信息。通过这个模块,我们可以将道路图像数据输入到后续的处理流程中。代码如下(同样是示意代码):
imageSensor = vision.ImageSensor;还有一些信号处理模块,例如边缘检测模块。我们通过边缘检测算法来识别道路的边界,进而判断车辆是否偏离车道。像Sobel边缘检测算子这样的算法可以在Simulink中通过相应的模块来实现。
联合仿真过程
将Prescan和Simulink联合起来进行仿真,需要进行一些巧妙的设置。首先,我们要在Prescan中配置好车辆模型和道路场景,然后将相关的数据输出到Simulink中。
自动驾驶Prescan 和simulink 联合仿真LDW模型,车道偏离预警
在Prescan中,我们设置车辆的行驶轨迹,并记录车辆与车道边界的相对位置等信息。这些信息会通过接口传递给Simulink。例如:
vehicle = prescan.vehicle('MyVehicle');
vehicle.setOutputSignals({'LateralDistanceToLaneCenter'});这里设置了车辆模型,并指定输出车辆到车道中心的横向距离信号。
在Simulink中,我们接收来自Prescan的数据,并基于这些数据进行车道偏离预警的逻辑判断。如果车辆到车道中心的横向距离超过了设定的阈值,就触发预警信号。代码逻辑大概如下:
inputSignal = input('LateralDistanceToLaneCenter');
threshold = 0.5; % 设定阈值
if inputSignal > threshold
warningSignal = 1;
else
warningSignal = 0;
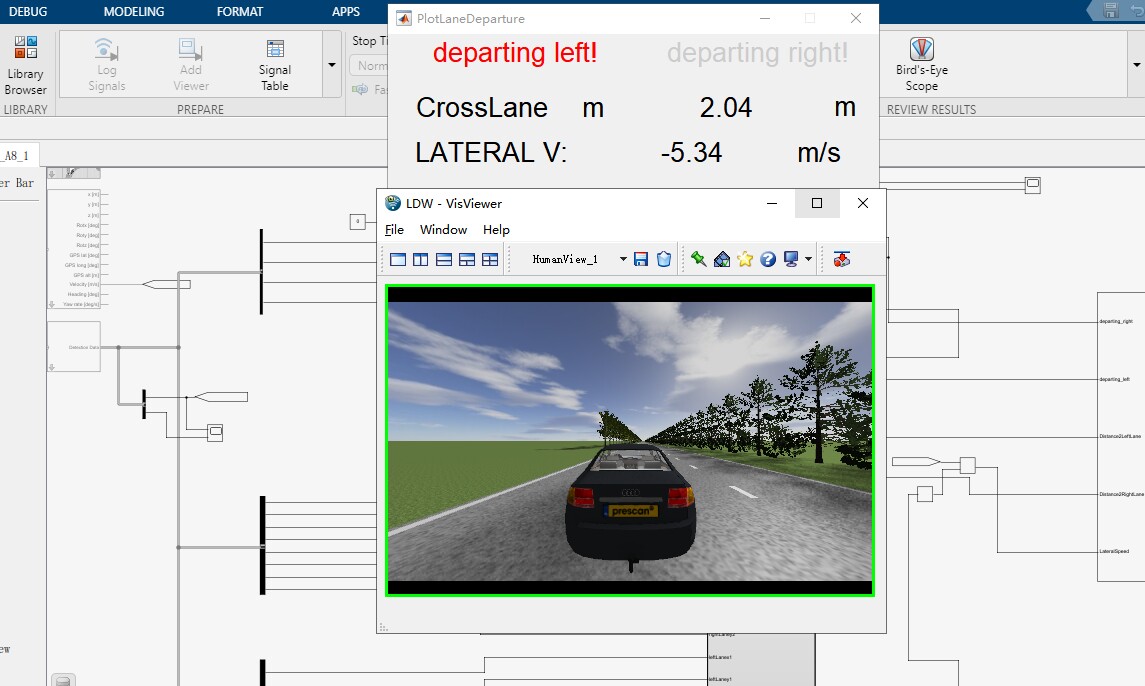
end通过这样的联合仿真,我们可以直观地看到车辆在不同道路场景下的车道偏离情况以及预警系统的工作效果。
遇到的问题及解决
在联合仿真过程中,遇到了一些数据传输和同步的问题。有时候Prescan输出的数据和Simulink接收的数据会出现时间不一致的情况。经过一番排查,发现是数据采样频率设置不一致导致的。调整了两个平台的数据采样频率后,问题得到了解决。
还有一次,在Simulink中运行算法时出现了错误,经过仔细检查代码逻辑,发现是一个条件判断语句写错了。修改后,整个联合仿真就顺利运行起来了。
总的来说,通过Prescan和Simulink联合仿真LDW模型是一个很有挑战性但也非常有趣的过程。它让我们更深入地理解了车道偏离预警系统的工作原理,也为自动驾驶的安全研究提供了一个很好的实践平台。期待在这个领域继续探索,不断优化我们的模型,为行车安全贡献更多力量!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 7
7 0
0- 0



 已为社区贡献179条内容
已为社区贡献179条内容

所有评论(0)