线控转向系统Carsim与Simulink联合仿真模型探索
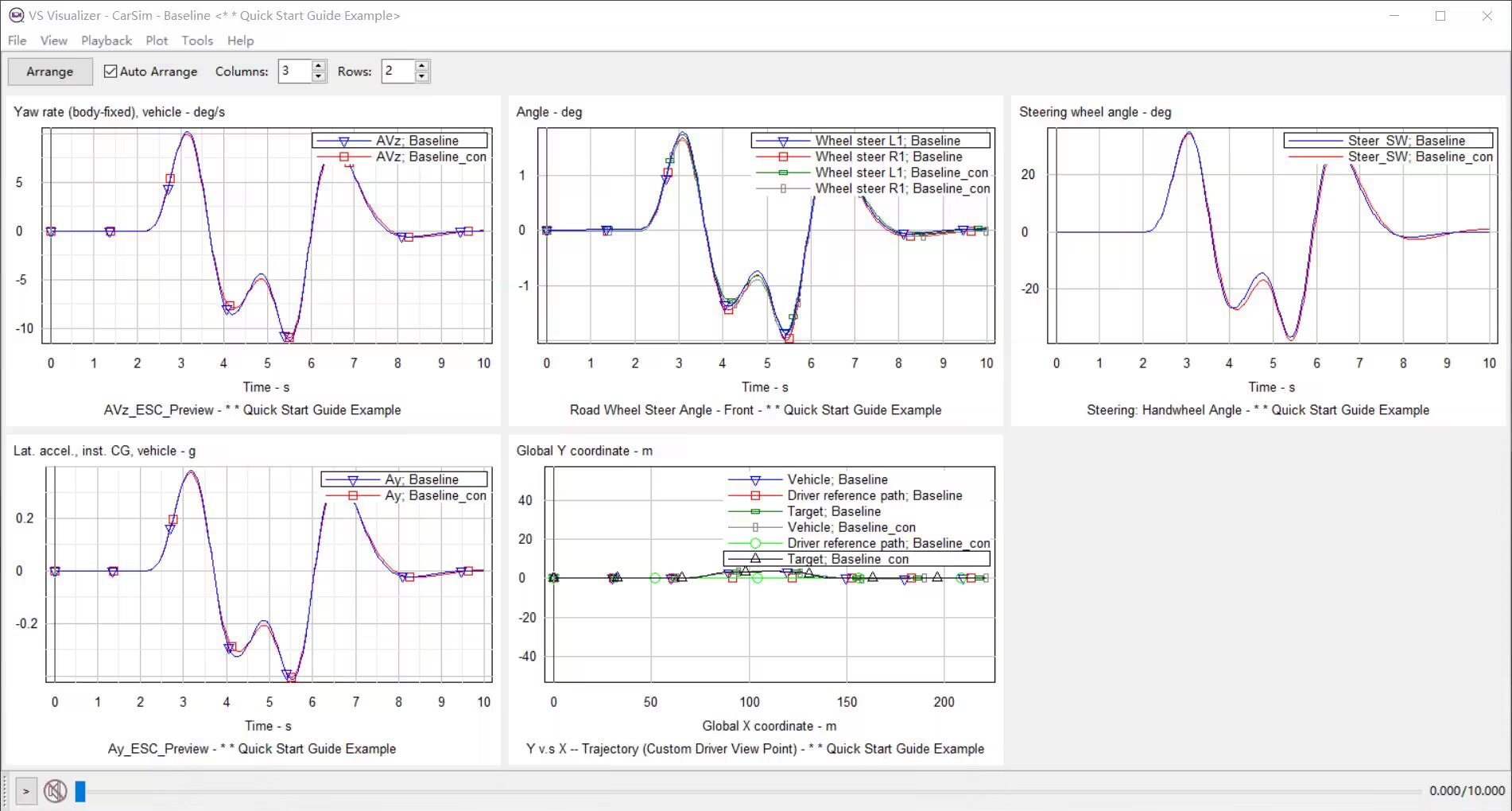
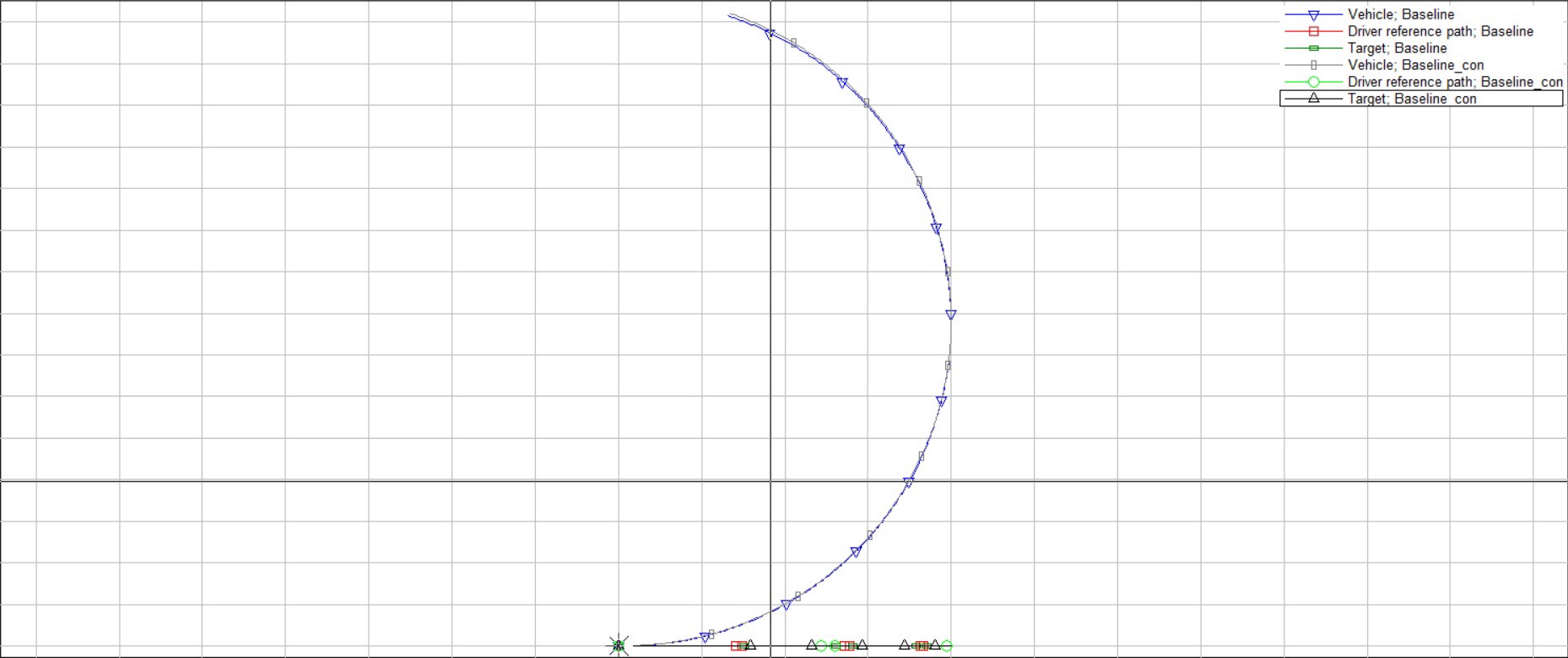
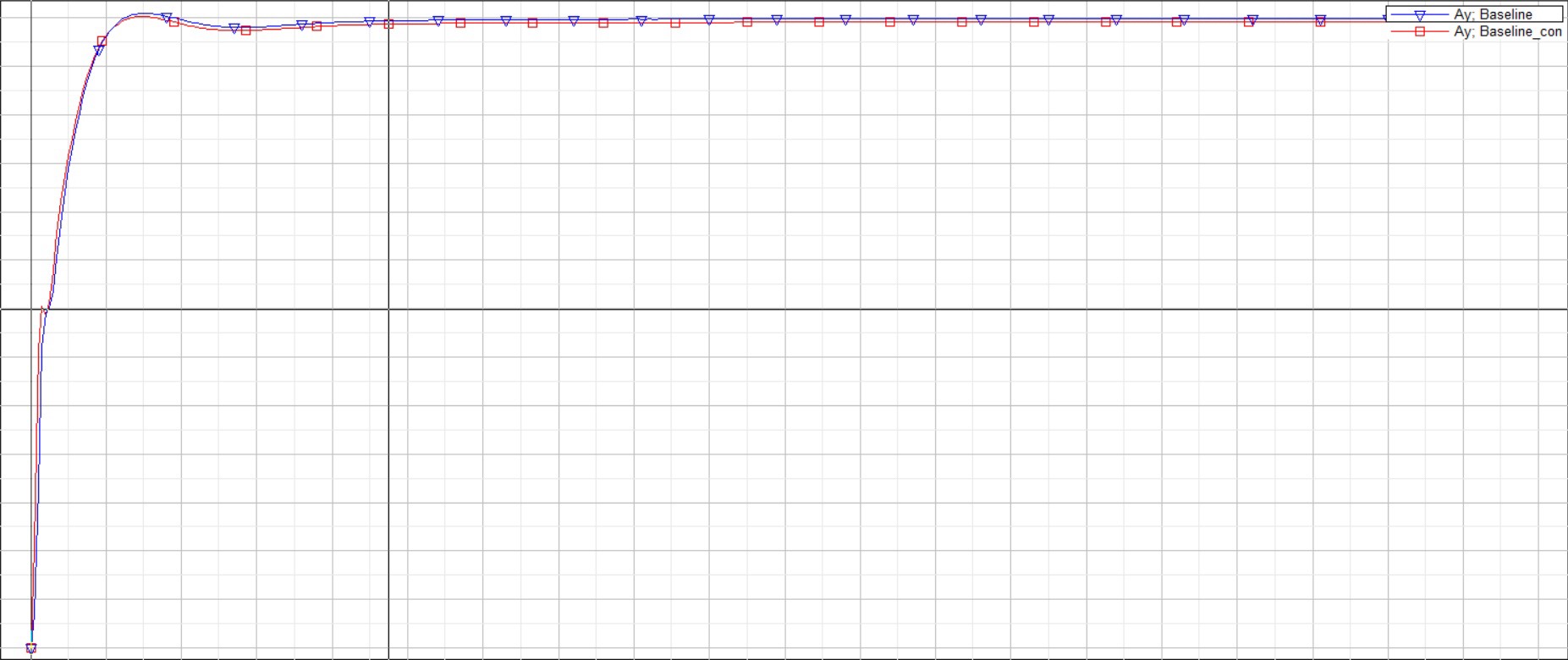
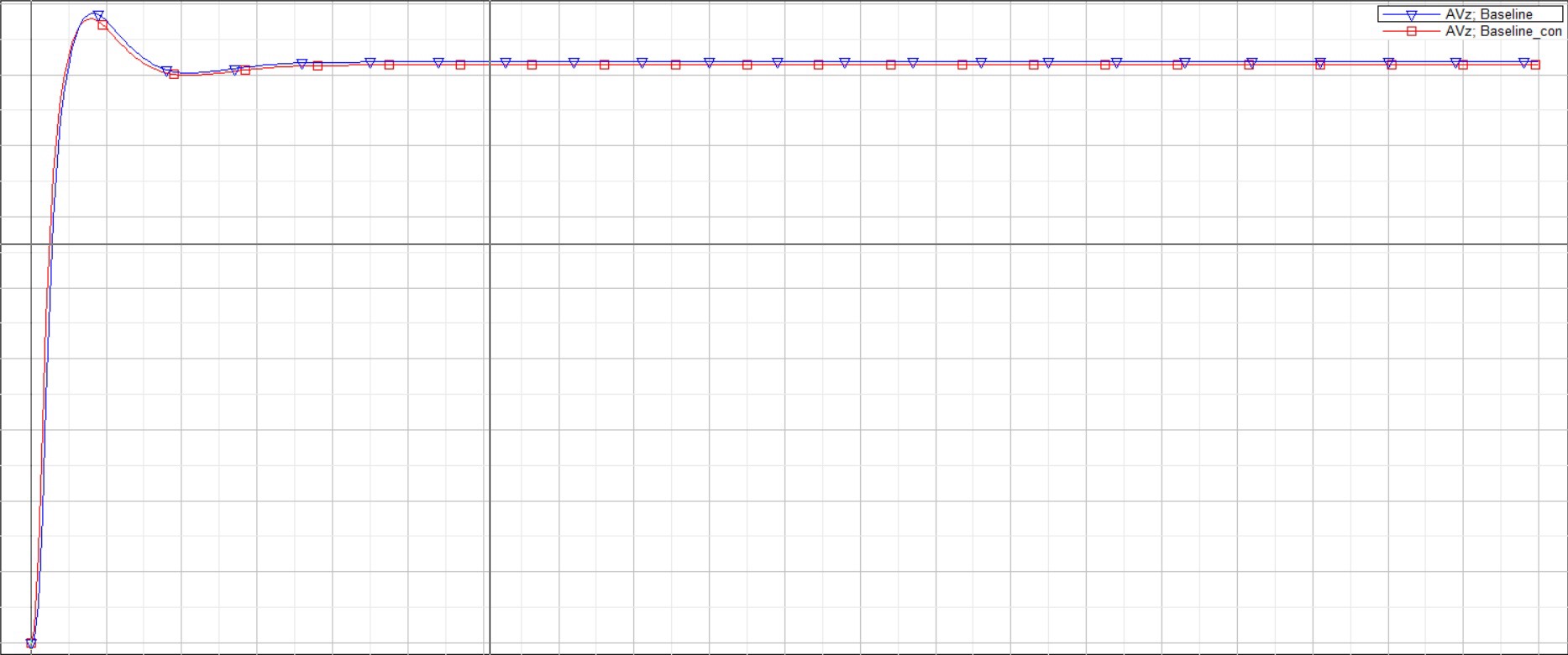
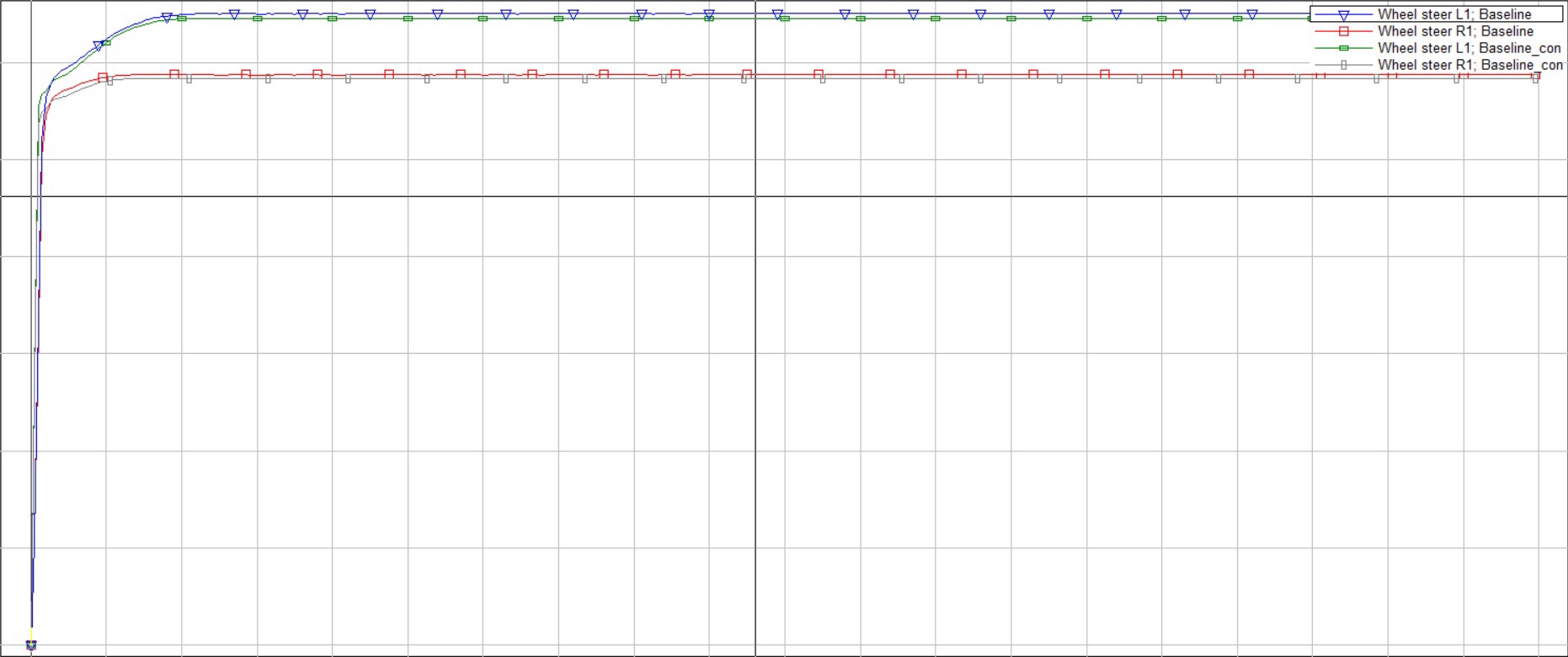
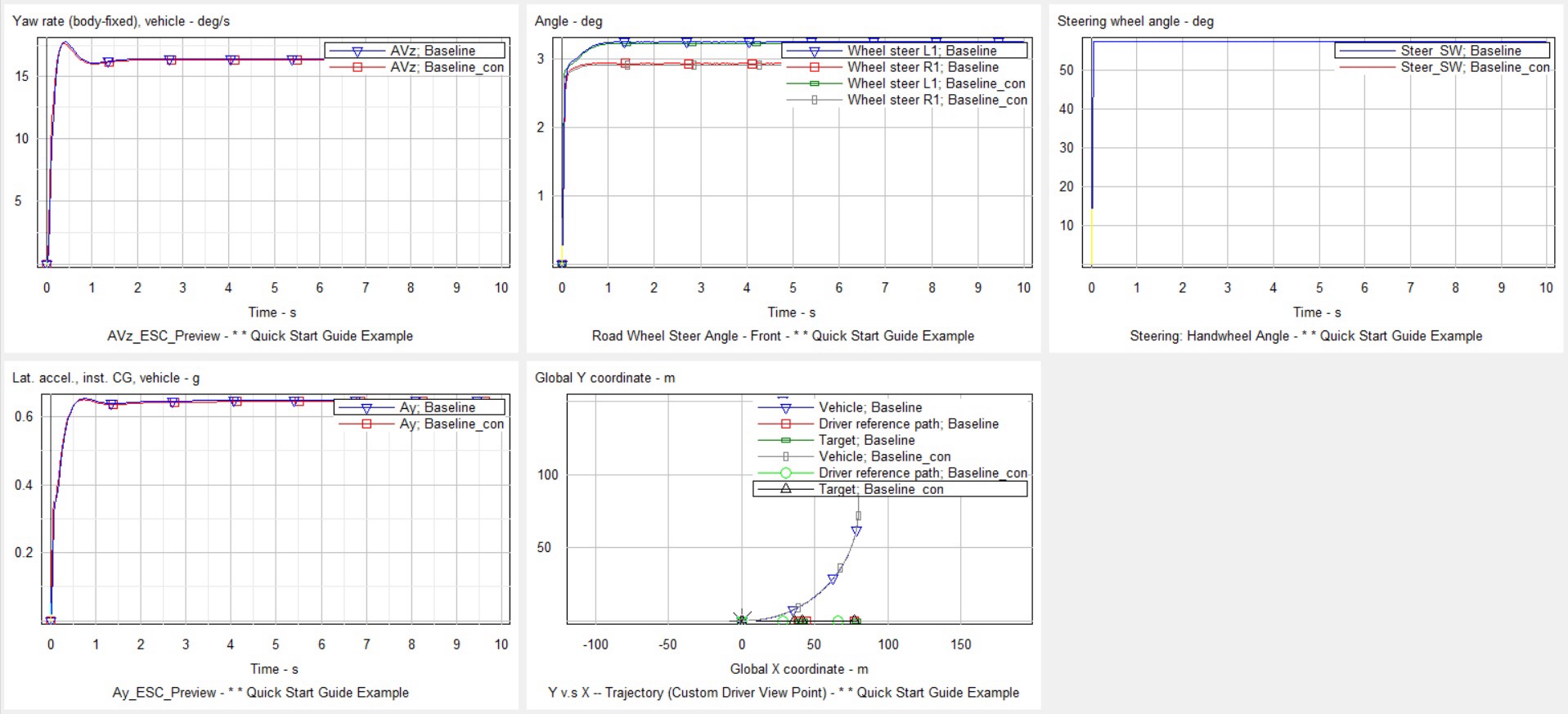
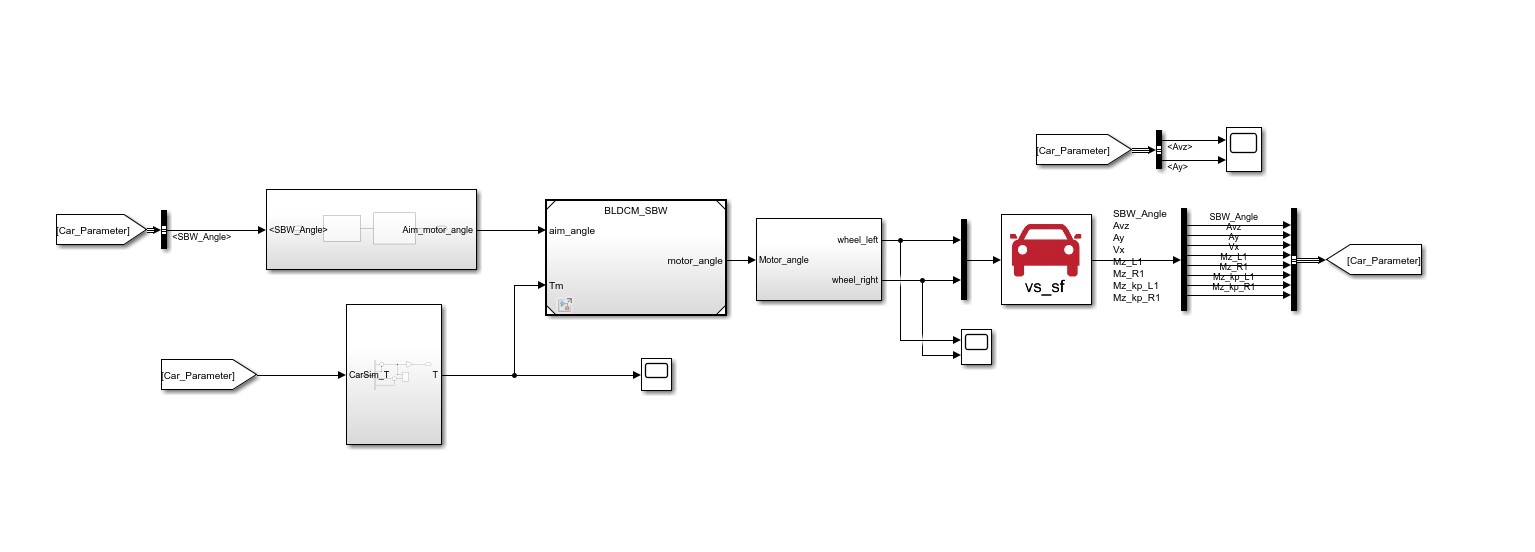
线控转向系统Carsim和Simulink联合仿真模型,带Carsim数据库,C级车。 【正向建模,利用三环PID控制算法控制无刷直流电机获得前轮转角】 主要根据Carsim自带的转向系统,查出小齿轮和转向角之间的关系,利用查表法反推目标转角,而后通过无刷直流电机模型跟踪目标转角。 图示为: 角阶跃工况下,仿真模型前轮转角、横摆角速度、侧向加速度、轨迹图。 最后一张图是 双移线 工况的响应曲线,拐角处响应跟对比的相比有差异。 不过不影响使用。 该卖品中包括 2019版 跟模型对应的Carsim数据库。 注: 模型中主要的内容为电机模型,其他是根据查表得出。
最近在研究线控转向系统,和大家分享一下基于Carsim和Simulink搭建的联合仿真模型,这个模型针对C级车,还带有Carsim数据库,非常实用。
一、正向建模与控制算法
整个模型采用正向建模方式,核心控制算法是三环PID控制算法,用于控制无刷直流电机从而获得前轮转角。为啥选这个算法呢?因为它能较为精准地对电机进行控制,实现对前轮转角的精确调节。
这里简单说下代码实现思路(以伪代码为例):
# 定义PID参数
Kp = 0.5
Ki = 0.1
Kd = 0.2
previous_error = 0
integral = 0
# 假设当前测量的前轮转角和目标转角
current_angle = 0
target_angle = 10
while True:
error = target_angle - current_angle
integral = integral + error
derivative = error - previous_error
control_signal = Kp * error + Ki * integral + Kd * derivative
# 通过控制信号去调节无刷直流电机
# 这里省略电机控制实际代码
previous_error = error
# 更新当前测量的前轮转角
current_angle = get_current_angle() 在这段代码里,Kp、Ki、Kd分别是比例、积分、微分系数,通过不断计算误差error,并结合之前的误差情况,得出控制信号control_signal,去调节无刷直流电机,进而调整前轮转角。
二、利用Carsim自带转向系统及查表法
Carsim自带的转向系统给我们提供了很好的基础。我们可以查出小齿轮和转向角之间的关系,然后利用查表法反推目标转角。具体怎么操作呢?比如说,我们建立一个表格,表格里记录着不同小齿轮参数对应的转向角,当获取到当前小齿轮的某个参数时,就可以通过查表快速得到目标转角。
线控转向系统Carsim和Simulink联合仿真模型,带Carsim数据库,C级车。 【正向建模,利用三环PID控制算法控制无刷直流电机获得前轮转角】 主要根据Carsim自带的转向系统,查出小齿轮和转向角之间的关系,利用查表法反推目标转角,而后通过无刷直流电机模型跟踪目标转角。 图示为: 角阶跃工况下,仿真模型前轮转角、横摆角速度、侧向加速度、轨迹图。 最后一张图是 双移线 工况的响应曲线,拐角处响应跟对比的相比有差异。 不过不影响使用。 该卖品中包括 2019版 跟模型对应的Carsim数据库。 注: 模型中主要的内容为电机模型,其他是根据查表得出。
这里用Python简单模拟下查表法:
lookup_table = {
1: 5,
2: 10,
3: 15
}
gear_parameter = 2
target_angle = lookup_table[gear_parameter]在实际模型中,这个表格会更复杂,数据也会更精确。得到目标转角后,无刷直流电机模型就开始发挥作用,去跟踪这个目标转角。
三、仿真结果展示
从仿真结果来看,在角阶跃工况下,我们能得到前轮转角、横摆角速度、侧向加速度以及轨迹图。这些数据和图形能直观地反映车辆在这种工况下的性能表现。
而双移线工况的响应曲线也很关键,虽然拐角处响应和对比的相比存在差异,但这个差异并不影响实际使用。这说明我们这个模型在整体上还是可靠的。
四、Carsim数据库
值得一提的是,这个卖品里包含2019版与模型对应的Carsim数据库。这个数据库为整个模型提供了丰富的基础数据支持,从车辆的基本参数到各种工况下的预设数据,都能在里面找到,极大地方便了我们对模型的调试和优化。
整个线控转向系统Carsim和Simulink联合仿真模型,以电机模型为主要内容,其他部分结合查表法实现,无论是对于研究线控转向系统的原理,还是实际应用的前期测试,都有很高的价值。希望大家对这个模型感兴趣,一起探讨更多优化和应用的可能性。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 8
8 0
0- 0



 已为社区贡献44条内容
已为社区贡献44条内容

所有评论(0)