WWW 2026 | 时间序列相关论文盘点 (附原文源码)
WWW 2026将于2026年6月29日至7月23日在阿联酋迪拜举行。我对时间序列(time series)相关的论文进行了梳理,并从中挑选出两篇具有代表性的工作。这两篇论文分别从不同角度切入时间序列分析中的两大核心难题,提出了针对性的解决方案。

第一篇论文针对训练数据中普遍存在的噪声与低可预测性样本,提出了一套通用训练框架,通过动态惩罚这些“难缠”的样本,有效提升了模型的鲁棒性。另一篇则聚焦于在线时间序列预测(OTSF)中的概念漂移(concept drift)问题,通过将漂移细分为不同类型,并设计动态专家委员会模型,让预测系统既能“记住”历史模式,也能灵活应对全新变化。具体解析请看下文。
另外WWW 2026 时间序列相关论文合集我已经整理好啦,感兴趣的自取,希望能帮到你!
源 文、姿 料,这儿~
![]()
一、论文1:Amortized Predictability-aware Training Framework for Time Series Forecasting and Classification
方法
本文提出了一个通用的摊销可预测性感知训练框架 (Amortized Predictability-aware Training Framework, APTF) 。
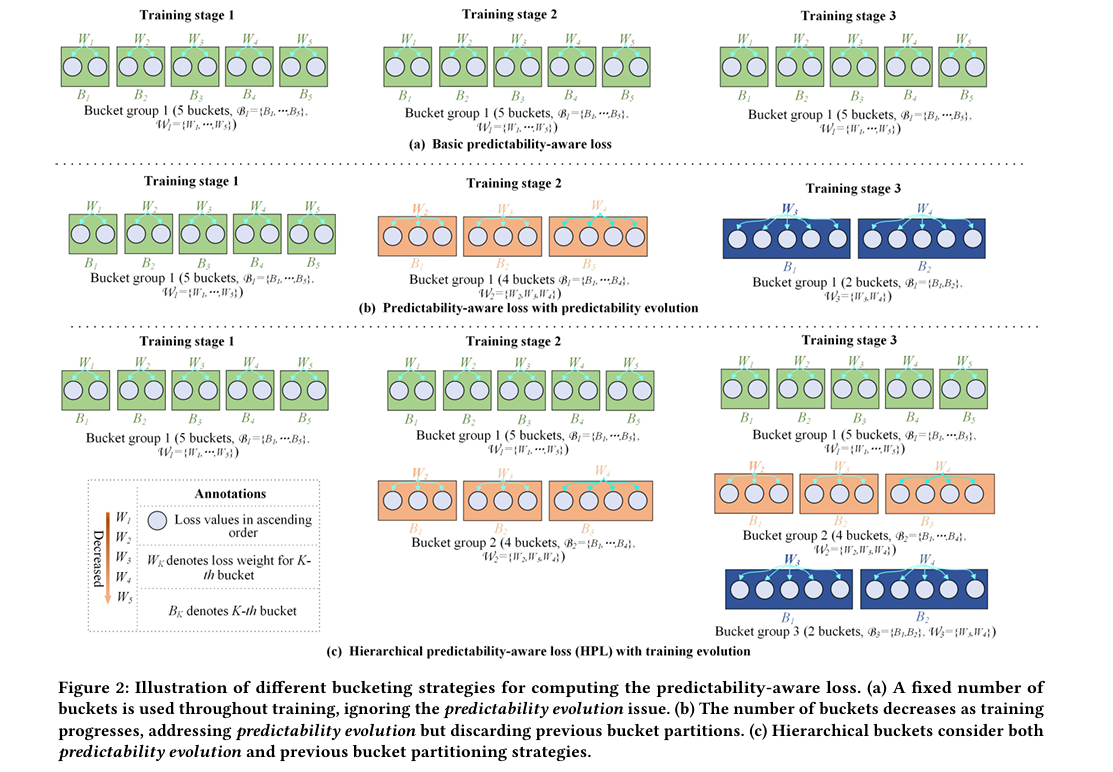
其核心是通过分层可预测性感知损失 (Hierarchical Predictability-aware Loss, HPL) 动态识别并惩罚训练中的低可预测性样本。该方法在训练的不同阶段,通过一个 evolving 的分桶策略,逐步加大对高损失样本的惩罚,同时引入一个摊销模型 (amortization model) 来修正单模型带来的估计偏差,从而提升模型训练的稳定性和最终性能。
创新点
-
首个关注低可预测性样本的通用训练框架:首次为时间序列预测 (Time Series Forecasting, TSF) 和时间序列分类 (Time Series Classification, TSC) 任务设计了一个统一的训练框架,通过动态惩罚噪声样本来改善模型收敛,具有广泛的适用性。
-
分层可预测性感知损失 (HPL) :创新地提出了HPL来解决“可预测性演化问题”。它通过在训练过程中动态调整分桶策略和损失权重,使模型能够专注于学习高可预测性样本,同时又不过度拟合噪声。
-
引入摊销模型减少估计偏差:受协同训练启发,引入一个辅助的摊销模型来交叉验证和修正主模型对样本可预测性的判断,有效减少了因模型自身偏见导致的错误惩罚,进一步增强了框架的有效性。
-
代码链接:https://github.com/Meteor-Stars/APTF
-
论文链接:https://arxiv.org/pdf/2602.16224
二、论文2:Dynamic Multi-period Experts for Online Time Series Forecasting
方法
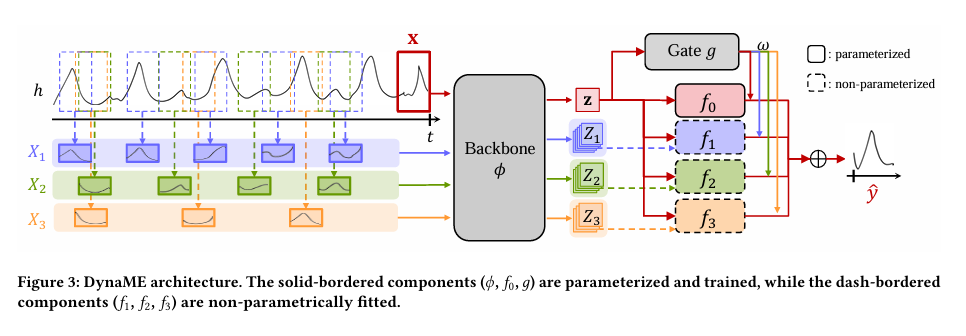
本文提出 DynaME (Dynamic Multi-period Experts),一个专为在线时间序列预测设计的混合框架。它通过动态专家委员会来应对不同类型的概念漂移。
对于循环漂移 (Recurring Drift),它利用傅里叶变换动态识别当前最相关的历史周期,并“即时”训练多个轻量级的非参数化 (non-parametric) 专家。对于突现漂移 (Emergent Drift) ,它通过监测危险信号 (danger signal) (预测误差的急剧增加)来启动安全机制,转而依赖一个稳定的通用专家,保证模型的适应性和稳定性。
创新点
-
概念漂移的创新分类:首次将在线预测中的概念漂移 (concept drift) 问题细分为“循环漂移”(历史模式重现)和“突现漂移”(全新模式出现)两种类型,为设计更精细的应对策略提供了理论基础。
-
动态非参数化专家委员会:独创性地使用一个动态委员会,其中包含多个“用完即弃”的非参数化专家。这些专家在每个时间步被快速拟合到最相关的历史数据上,以极低的计算成本高效捕捉循环出现的模式。
-
双重适应机制:设计了巧妙的双重机制:一个动态门控网络 (Dynamic Gating Network) 用于智能组合不同专家的预测,以适应循环漂移;一个基于“危险信号”的安全机制则用于在突现漂移发生时稳定模型,防止性能崩溃。
关键公式
论文通过求解岭回归的对偶形式,实现了非参数化专家的快速拟合。其预测计算公式如下,该方法避免了对高维特征矩阵求逆,将计算复杂度从依赖于特征维度 转移到依赖于更小的样本数量 ,是实现高效在线学习的关键。
其中, 是第 个专家的预测, 是当前输入的特征表示, 和 分别是该专家从历史数据中采样得到的特征和目标批次。
-
代码链接:https://github.com/shhong97/DynaME
-
论文链接:https://arxiv.org/pdf/2603.09062

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 11
11 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)