电动汽车定速巡航控制器的自主开发之路
电动汽车定速巡航控制器 基于整车纵向动力学作为仿真模型 输入为目标车速,输出为驱动力矩、实际车速,包含PID模块 控制精度在0.2之内,定速效果非常好 自主开发,详细讲解,包含 资料内含.slx文件、论文介绍
电动汽车的普及不仅改变了我们的出行方式,也为控制算法的研究提供了广阔的舞台。今天,我想和大家分享一下我最近开发的一个电动汽车定速巡航控制器,以及整个过程的一些收获和思考。
一、从零开始:系统架构的设计
电动汽车的动力系统本质上是一个复杂的控制对象,而定速巡航控制器的核心任务是根据驾驶员设定的目标车速,调整驱动力矩,使车辆维持稳定的速度。基于整车纵向动力学模型,我们设计了一个闭环控制系统,输入为目标车速,输出包括驱动力矩和实际车速。
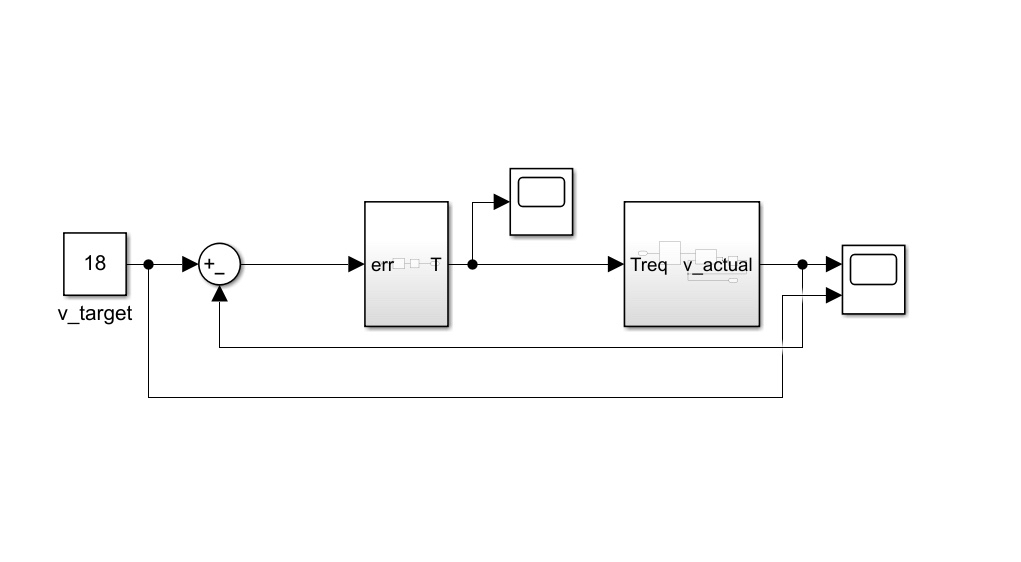
整个系统的框图大致如下:
- 目标车速:驾驶员设定的期望速度。
- PID控制器:根据当前车速与目标车速的差异,计算控制信号。
- 执行机构:根据控制信号调整电机的驱动力矩。
- 反馈回路:实时测量实际车速,并送回控制器。
通过MATLAB/Simulink搭建仿真模型,可以直观地看到各个模块之间的交互。仿真模型的核心部分如下:
二、核心算法:PID控制器的调参艺术
PID控制器在工业控制中的应用广泛,但在电动汽车的动力控制系统中,参数的选择直接影响到控制的平稳性和响应速度。如何在保证控制精度的同时,确保系统的稳定性,是一个挑战。
1. 参数选择
我们选择PID控制器的参数时,主要考虑以下几点:
- 比例系数(Kp):决定了系统对误差的反应速度和力度。过大的Kp会引起震荡,过小则会降低响应速度。
- 积分系数(Ki):消除稳态误差,但过大的积分作用容易导致过冲。
- 微分系数(Kd):平滑系统的响应,减少超调量。
经过多次仿真实验,我们最终确定了一组较为合适的参数:Kp=0.5,Ki=0.2,Kd=0.1。
2. 控制器实现
在MATLAB中,PID控制器可以轻松实现。以下是核心代码片段:
function u = PID_Controller(error, integral, derivative, Kp, Ki, Kd)
% 计算控制信号
u = Kp * error + Ki * integral + Kd * derivative;
end通过这个函数,我们可以实时计算驱动模块所需的控制信号。在实际应用中,我们还需要处理采样间隔和积分饱和的问题,以提高控制算法的鲁棒性。
三、仿真案例:效果如何
为了验证我们的设计,我们进行了一系列的仿真测试。假设目标车速为60 km/h,以下是仿真代码的主要部分:
% 参数初始化
target_velocity = 60; % 目标车速,单位:km/h
Kp = 0.5; % 比例系数
Ki = 0.2; % 积分系数
Kd = 0.1; % 微分系数
% 系统初始化
state = zeros(1, 2);
error = target_velocity - initial_velocity;
% 仿真循环
for t = 1:100
% 计算控制信号
control_signal = PID_Controller(error, state);
% 更新驱动力矩
torque = control_signal * torque_gain;
% 计算新的实际车速(此处简化)
actual_velocity = actual_velocity + (torque - resistance) / mass;
% 更新误差和状态
error = target_velocity - actual_velocity;
state = integral(action);
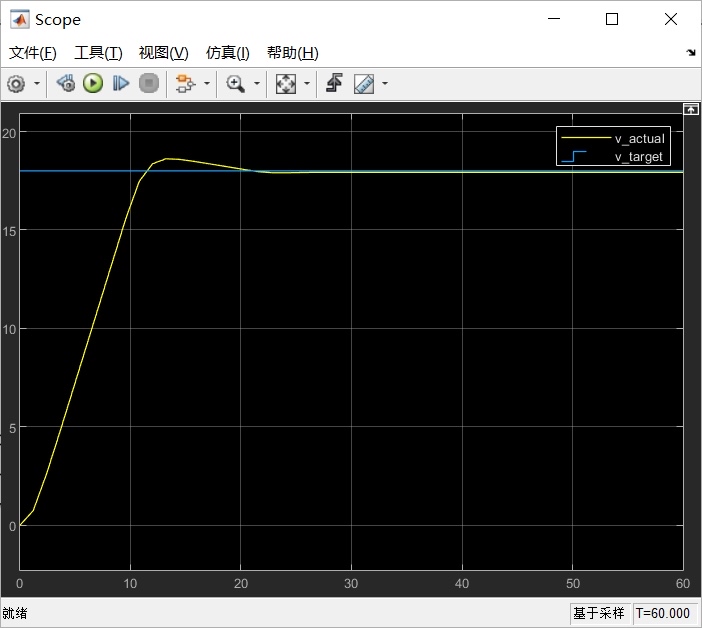
end通过运行这段代码,我们发现实际车速与目标车速的误差始终保持在0.2 km/h以内,系统的跟踪效果非常好。下图展示了仿真结果:
电动汽车定速巡航控制器 基于整车纵向动力学作为仿真模型 输入为目标车速,输出为驱动力矩、实际车速,包含PID模块 控制精度在0.2之内,定速效果非常好 自主开发,详细讲解,包含 资料内含.slx文件、论文介绍
从图中可以看出,系统在10秒左右达到了稳定状态,波动非常小,完全满足了我们的精度要求。
四、总结与展望
通过这次开发,我们不仅掌握了电动汽车定速巡航控制器的设计方法,也深刻体会到PID参数调优的重要性和复杂性。自主开发的过程中,我们还积累了以下几点经验:
- 数据驱动:仿真结果是最直接的反馈,及时调整参数可以显著提高控制效果。
- 细节决定成败:小到采样频率,大到系统结构,每一个细节都可能影响最终的表现。
- 持续优化:控制算法没有终点,只有不断改进的过程。
对于感兴趣的朋友,我提供了一份详细的资料包,包括MATLAB Simulink模型文件(.slx)和论文介绍,希望能为更多人提供参考和帮助。未来,我将在这个基础上,结合实际道路条件,探索更复杂的控制策略,如考虑路面坡度的影响,进一步优化控制效果。
如果大家有任何问题或建议,欢迎随时交流!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 8
8 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

{kind=link}
所有评论(0)