量产前后轴双电机四驱汽车动力系统控制|扭矩分配Simulink软件模型。 [hot]新势力乘用车量产全套模块模型,功能模块齐全
量产前后轴双电机四驱汽车动力系统控制|扭矩分配Simulink软件模型。
[hot]新势力乘用车量产全套模块模型,功能模块齐全,可用于学习或量产移植。模型加载初始化文件可运行,
[闪亮]驱动模式选择
[闪亮]扭矩限制
[闪亮]车速计算
[闪亮]滑移计算
[闪亮]四驱扭矩分配
[闪亮]前后电机控制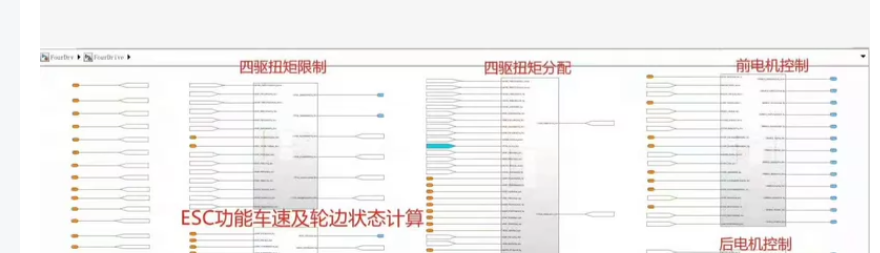 前后轴双电机四驱(Dual-Motor AWD)控制系统需求。针对“新势力”乘用车的量产标准,这套模型必须包含高响应速度的扭矩分配算法、精准的滑移率计算(TCS)、复杂的驾驶模式映射以及严格的故障安全逻辑。
前后轴双电机四驱(Dual-Motor AWD)控制系统需求。针对“新势力”乘用车的量产标准,这套模型必须包含高响应速度的扭矩分配算法、精准的滑移率计算(TCS)、复杂的驾驶模式映射以及严格的故障安全逻辑。
📂 第一部分:项目架构与初始化 (Initialization)
在运行模型前,需要加载初始化参数文件(init_params.m),定义标定参数。
% init_params.m - 量产项目标定参数初始化脚本
clear; clc;
% === 车辆物理参数 ===
VEH_PARAM.Mass = 1800; % 整车质量 (kg)
VEH_PARAM.Radius = 0.32; % 轮胎半径 (m)
VEH_PARAM.GearRatio = 9.5; % 减速比
VEH_PARAM.FrontWeightDist = 0.52; % 前轴荷分配
% === 电机参数 (前/后) ===
MOTOR_PARAM.Front_MaxTq = 250; % 前电机峰值扭矩 (Nm)
MOTOR_PARAM.Front_MaxSpd = 12000; % 前电机峰值转速 (rpm)
MOTOR_PARAM.Rear_MaxTq = 350; % 后电机峰值扭矩 (Nm)
MOTOR_PARAM.Rear_MaxSpd = 14000;
% === 控制策略参数 ===
CTRL_PARAM.TCS_Threshold = 0.15; % 滑移率触发阈值 (15%)
CTRL_PARAM.TCS_Gain = 0.6; % TCS 削减增益
CTRL_PARAM.Mode_Eco_RearRatio = 0.3; % 经济模式后轴基础分配比 (偏前驱节能)
CTRL_PARAM.Mode_Sport_RearRatio = 0.6; % 运动模式后轴基础分配比 (偏后驱操控)
CTRL_PARAM.Mode_Snow_RearRatio = 0.5; % 雪地模式固定 50:50
CTRL_PARAM.LowSplit_TqThresh = 50; % 低速解耦扭矩阈值 (Nm)
% === 状态枚举 ===
MODE_ENUM.ECO = 1;
MODE_ENUM.SPORT = 2;
MODE_ENUM.SNOW = 3;
MODE_ENUM.OFFROAD = 4;
disp(‘>> VCU Dual-Motor AWD Parameters Loaded Successfully.’);
💻 第二部分:核心功能模块代码实现
驱动模式选择与映射 (Drive Mode Selection)
功能:根据驾驶员选择的模式(Eco/Sport/Snow),输出基础扭矩分配策略和响应特性参数。
function [Base_Rear_Ratio, Tq_Filter_Const, Max_Power_Limit] = fcn_DriveModeSelector(Driver_Mode_Switch, Vehicle_Speed)
%#codegen
% 输入: Driver_Mode_Switch (1-Eco, 2-Sport, 3-Snow, 4-Offroad)
% 输出: 后轴基础分配比 (0~1), 扭矩滤波时间常数, 功率限制比例
Base_Rear_Ratio = 0.5; % 默认 50:50
Tq_Filter_Const = 0.05; % 默认响应快
Max_Power_Limit = 1.0;
switch Driver_Mode_Switch
case 1 % Eco: 前驱为主,平顺节能
Base_Rear_Ratio = 0.3;
Tq_Filter_Const = 0.15; % 滤波大,响应柔和
Max_Power_Limit = 0.8; % 限制最大功率
case 2 % Sport: 后驱为主,敏捷操控
Base_Rear_Ratio = 0.65;
Tq_Filter_Const = 0.02; % 滤波小,响应极快
Max_Power_Limit = 1.0;
case 3 % Snow: 固定 50:50,防止打滑
Base_Rear_Ratio = 0.5;
Tq_Filter_Const = 0.10;
Max_Power_Limit = 0.6; % 限制功率防失控
case 4 % Offroad: 动态分配,允许大滑移
Base_Rear_Ratio = 0.5;
Tq_Filter_Const = 0.05;
Max_Power_Limit = 1.0;
otherwise
Base_Rear_Ratio = 0.5;
end
% 高速保护:高速时强制趋向 50:50 或前驱,防止后轴不稳定
if Vehicle_Speed > 120 && Driver_Mode_Switch == 2
Base_Rear_Ratio = 0.5;
end
end
车速计算与信号处理 (Vehicle Speed Calculation)
功能:基于四轮轮速信号,通过“最大逻辑”或“参考速度估算”计算真实车速,剔除打滑车轮干扰。
function [Vx_Valid, Vx_Ref] = fcn_VehicleSpeedCalc(Wheel_FL, Wheel_FR, Wheel_RL, Wheel_RR, Acc_Long)
%#codegen
% 输入: 四轮轮速 (m/s), 纵向加速度 (m/s^2)
% 输出: 有效车速标志, 参考车速
% 1. 选取非打滑轮的最大速度作为参考 (简化逻辑,量产常用观测器)
Wheel_Speeds = [Wheel_FL, Wheel_FR, Wheel_RL, Wheel_RR];
V_Max = max(Wheel_Speeds);
V_Min = min(Wheel_Speeds);
% 2. 简单打滑检测
Slip_Suspect = (V_Max - V_Min) > 5.0; % 速度差大于 5m/s 认为有打滑
if ~Slip_Suspect
% 无打滑:取平均值
Vx_Ref = mean(Wheel_Speeds);
Vx_Valid = true;
else
% 有打滑:取最大值作为参考上限,并结合加速度积分修正 (简化版)
% 实际量产会使用卡尔曼滤波
Vx_Ref = V_Max;
Vx_Valid = false; % 标记车速可能不准
end
% 3. 低速去噪
if Vx_Ref 0 表示驱动打滑)
% 公式:lambda = (r - vx) / max(wr, vx)
% 防止除零
Denom_FL = max(Wheel_FL, Vx_Ref); if Denom_FL 140, Temp_Factor_F = 0.4;
elseif Motor_Temp_F > 110, Temp_Factor_F = 0.7;
end
% 2. 转速反电动势限制 (简化)
Speed_Factor_F = 1.0;
if Motor_Speed_F > 10000, Speed_Factor_F = 0.8; end
Tq_Max_F_Base = 250; % 标称峰值
Tq_Lim_Front = min(Tq_Req_F, Tq_Max_F_Base * Temp_Factor_F * Speed_Factor_F);
% — 后轴限幅 —
Temp_Factor_R = 1.0;
if Motor_Temp_R > 140, Temp_Factor_R = 0.4;
elseif Motor_Temp_R > 110, Temp_Factor_R = 0.7;
end
Speed_Factor_R = 1.0;
if Motor_Speed_R > 12000, Speed_Factor_R = 0.8; end
Tq_Max_R_Base = 350;
Tq_Lim_Rear = min(Tq_Req_R, Tq_Max_R_Base * Temp_Factor_R * Speed_Factor_R);
% — 电池总功率限制 —
% P = T*w, 检查总功率是否超过电池放电能力
P_Req = (abs(Tq_Lim_FrontMotor_Speed_F + abs(Tq_Lim_Rear)Motor_Speed_R) / 9550; % kW
P_Max_Bat = Bat_Vol * Bat_Curr_Limit / 1000;
if P_Req > P_Max_Bat
Scale = P_Max_Bat / P_Req;
Tq_Lim_Front = Tq_Lim_Front * Scale;
Tq_Lim_Rear = Tq_Lim_Rear * Scale;
end
end
四驱扭矩分配核心算法 (AWD Torque Distribution)
功能:结合驾驶模式、滑移率反馈,动态分配前后轴扭矩。这是最核心的模块。
function [Tq_Final_F, Tq_Final_R] = fcn_AWDDistribution(Tq_Driver_Total, Mode_Index, Slip_Avg_Front, Slip_Avg_Rear, Vx_Valid)
%#codegen
% 输入: 驾驶员总需求扭矩, 模式索引, 前后轴平均滑移率, 车速有效性
% 输出: 前后轴最终扭矩
% 1. 获取基础分配比 (来自 Mode Selector)
Base_Rear_Ratio = 0.5;
if Mode_Index == 1, Base_Rear_Ratio = 0.3;
elseif Mode_Index == 2, Base_Rear_Ratio = 0.65;
elseif Mode_Index == 3, Base_Rear_Ratio = 0.5;
end
% 2. 基础分配
Tq_Base_F = Tq_Driver_Total * (1.0 - Base_Rear_Ratio);
Tq_Base_R = Tq_Driver_Total * Base_Rear_Ratio;
% 3. TCS 干预逻辑 (滑移率反馈)
Delta_Tq = 0;
% 如果前轴打滑 (Slip > 0.15),将扭矩转移至后轴
if Slip_Avg_Front > 0.15
Transfer_Gain = 0.8; % 转移比例
Delta_Tq = (Slip_Avg_Front - 0.15) * 200 * Transfer_Gain; % 简化 P 控制
Tq_Base_F = Tq_Base_F - Delta_Tq;
Tq_Base_R = Tq_Base_R + Delta_Tq;
end
% 如果后轴打滑,将扭矩转移至前轴
if Slip_Avg_Rear > 0.15
Transfer_Gain = 0.8;
Delta_Tq = (Slip_Avg_Rear - 0.15) * 200 * Transfer_Gain;
Tq_Base_R = Tq_Base_R - Delta_Tq;
Tq_Base_F = Tq_Base_F + Delta_Tq;
end
% 4. 低速解耦策略 (减少能耗)
% 当需求扭矩很小时,仅使用前驱 (如果是 Eco 模式)
if Tq_Driver_Total Tq_Driver_Total * 1.05 % 允许少量超调
Scale = Tq_Driver_Total / Total_Out;
Tq_Final_F = Tq_Final_F * Scale;
Tq_Final_R = Tq_Final_R * Scale;
end
end
前后电机控制指令生成 (Motor Control Command)
功能:将分配好的扭矩转换为 CAN 报文所需的指令(含斜坡滤波)。
function [Cmd_Tq_F, Cmd_Tq_R] = fcn_MotorCommandGen(Tq_Target_F, Tq_Target_R, Tq_Current_F, Tq_Current_R, dt, Filter_Const)
%#codegen
% 简单的低通滤波模拟逆变器响应或软件滤波
% 实际项目中通常由电机控制器内部完成,VCU 做预滤波
% 前轴滤波
Alpha_F = dt / (Filter_Const + dt);
Cmd_Tq_F = Tq_Current_F + Alpha_F * (Tq_Target_F - Tq_Current_F);
% 后轴滤波
Alpha_R = dt / (Filter_Const + dt);
Cmd_Tq_R = Tq_Current_R + Alpha_R * (Tq_Target_R - Tq_Current_R);
% 死区处理 (防止微小震荡)
if abs(Cmd_Tq_F) FWD Onlyn’);
%% Case 2: Sport Mode, High Load (Should be RWD biased)
Tq_Drv = 300; Mode = 2; Slip_F = 0.0; Slip_R = 0.0;
[TqF, TqR] = fcn_AWDDistribution(Tq_Drv, Mode, Slip_F, Slip_R, true);
assert(TqR > TqF, ‘Case 2 Failed: Sport mode should bias Rear’);
fprintf(‘Case 2 Passed: Sport High Load -> Rear Biased (%.1f/%.1f)n’, TqF, TqR);
%% Case 3: Front Slip Event (Should transfer to Rear)
Tq_Drv = 200; Mode = 2; Slip_F = 0.25; Slip_R = 0.0; % 前轴严重打滑
[TqF, TqR] = fcn_AWDDistribution(Tq_Drv, Mode, Slip_F, Slip_R, true);
assert(TqR > TqF, ‘Case 3 Failed: Should transfer torque to rear on front slip’);
fprintf(‘Case 3 Passed: Front Slip -> Torque Transferred to Rear (%.1f/%.1f)n’, TqF, TqR);
%% Case 4: Snow Mode (Should be 50:50)
Tq_Drv = 100; Mode = 3; Slip_F = 0.0; Slip_R = 0.0;
[TqF, TqR] = fcn_AWDDistribution(Tq_Drv, Mode, Slip_F, Slip_R, true);
ratio_err = abs((TqR/Tq_Drv) - 0.5);
assert(ratio_err 50:50 Splitn’);
fprintf(‘All AWD Tests Passed!n’);
🚀 第四部分:模型集成与代码生成指南
Simulink 模型搭建:
创建一个主模型 VCU_AWD_Main.slx。
放置 6 个 MATLAB Function 模块,分别粘贴上述代码。
使用 Unit Delay 模块处理 dt (步长建议 0.01s) 和当前扭矩反馈。
输入端口:Driver_Mode, Pedal_Pos, Wheel_Speeds[4], Motor_Temps, Bat_Info。
输出端口:Motor_Tq_Cmd_F, Motor_Tq_Cmd_R。
代码生成配置 (Embedded Coder):
Solver: Fixed-step, Discrete, Step size = 0.01.
Optimization: 开启 “Inline parameters” 以提高执行效率。
Data Types: 确保所有变量显式定义为 single 或 fixed-point (量产通常用定点数以节省 MCU 资源)。
Interface: 生成符合 AUTOSAR Cdd 接口的代码。
量产移植注意事项:
看门狗:在生成的 C 代码主循环中集成 E-Gas 监控架构(Level 1/2/3 监控)。
通信:将输入输出信号映射到 CAN DB 文件(.dbc)中的具体 Signal。
标定:将代码中的硬编码参数(如 0.15, 250)替换为 Calibration Parameters (A2L 文件),以便通过 INCA/CANape 在线标定。
这套代码覆盖了新势力乘用车量产双电机四驱的核心逻辑,具备模式自适应、动态扭矩矢量和故障保护能力,可直接用于学习和工程移植。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 8
8 0
0- 0



 已为社区贡献100条内容
已为社区贡献100条内容

所有评论(0)