基于LQR的主动悬架控制与被动悬架性能仿真对比(四分之一模型)
基于lqr的主动悬架控制与被动悬架的性能仿真表现(matlabsimulink)对比,模型为四分之一模型。 扰动输入,有简单视频讲解,配套的本程序对应内容资料(伦纹)
在汽车悬架系统的研究中,主动悬架控制与被动悬架的性能对比一直是热门话题。今天咱们就基于Matlab Simulink,以四分之一车辆模型为例,深入探讨下基于线性二次型调节器(LQR)的主动悬架控制和被动悬架的性能仿真表现。
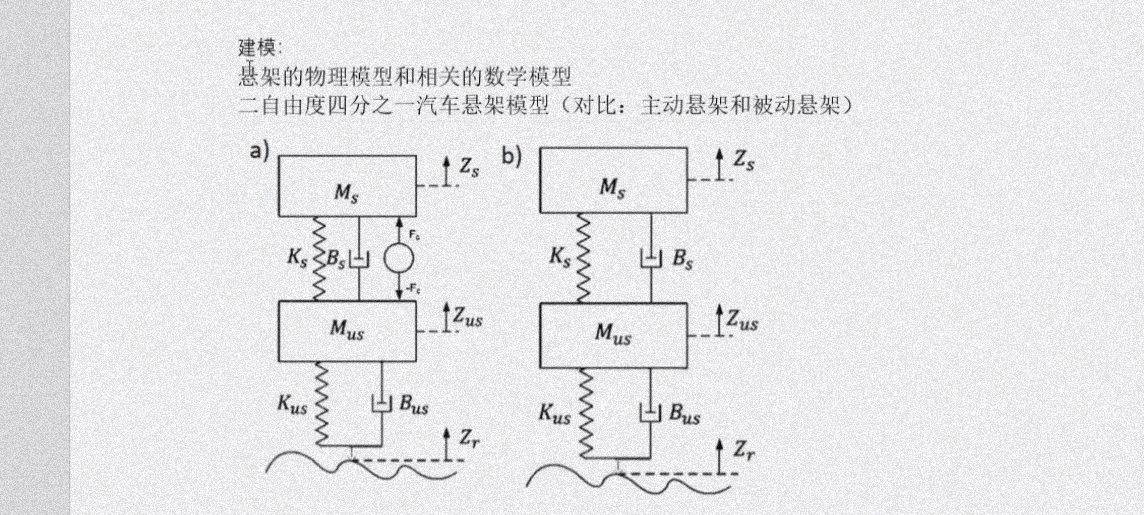
四分之一车辆模型介绍
四分之一车辆模型把车辆简化成由车身质量 $ms$ 、非簧载质量 $m{us}$ 、弹簧刚度 $ks$ 、阻尼系数 $cs$ 组成。它忽略了车辆左右和前后方向的运动,只考虑垂直方向的振动,虽然简单但能有效反映悬架主要特性。
被动悬架模型建立
在Matlab Simulink里搭建被动悬架模型很直观。先定义好各个参数,比如车身质量 $ms = 250$ kg,非簧载质量 $m{us} = 30$ kg,弹簧刚度 $ks = 20000$ N/m,阻尼系数 $cs = 1000$ N·s/m 。
% 参数定义
ms = 250;
mus = 30;
ks = 20000;
cs = 1000;然后利用Simulink的模块库,搭建由积分器、增益模块等构成的动力学方程模型。被动悬架系统遵循以下运动方程:
\[
\begin{cases}
ms \ddot{z}s = -ks (zs - z{us}) - cs (\dot{z}s - \dot{z}{us}) \\
m{us} \ddot{z}{us} = ks (zs - z{us}) + cs (\dot{z}s - \dot{z}{us}) - k{tire} (z{us} - z_{road})
\end{cases}
基于lqr的主动悬架控制与被动悬架的性能仿真表现(matlabsimulink)对比,模型为四分之一模型。 扰动输入,有简单视频讲解,配套的本程序对应内容资料(伦纹)
\]
其中,$zs$ 是车身位移,$z{us}$ 是非簧载质量位移,$z{road}$ 是路面位移(也就是扰动输入),$k{tire}$ 是轮胎刚度(这里假设为常量)。在Simulink里,通过合理连接模块就能实现这个方程的求解。
基于LQR的主动悬架模型
LQR是一种最优控制策略,目标是让性能指标函数最小化。对于主动悬架,性能指标函数一般定义为:
\[
J = \int_{0}^{\infty} (x^T Q x + u^T R u) dt
\]
其中,$x$ 是状态变量,$u$ 是控制输入(主动悬架控制力),$Q$ 和 $R$ 是权重矩阵。选择合适的 $Q$ 和 $R$ 矩阵很关键,它们决定了悬架性能的侧重点。
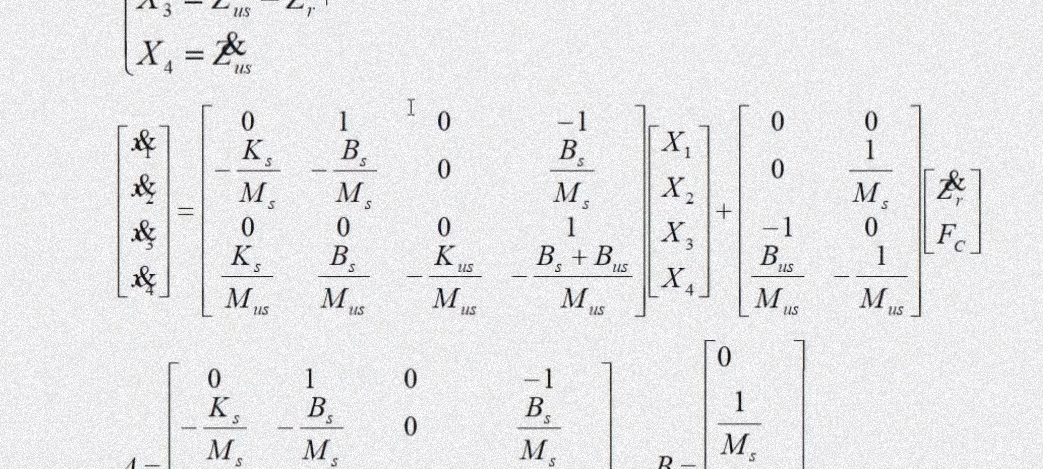
% 状态空间模型
A = [0 1 0 0;
-ks/ms -cs/ms ks/ms cs/ms;
0 0 0 1;
ks/mus cs/mus -ks/mus -cs/mus];
B = [0; 1/ms; 0; -1/mus];
C = [1 0 0 0];
D = 0;
sys = ss(A,B,C,D);
% 权重矩阵
Q = [1000 0 0 0;
0 10 0 0;
0 0 100 0;
0 0 0 10];
R = 1;
[K,S,e] = lqr(A,B,Q,R);这段代码先构建了系统的状态空间模型,然后定义权重矩阵 $Q$ 和 $R$,通过 lqr 函数计算出反馈增益矩阵 $K$ 。在Simulink模型里,将这个增益矩阵结合状态反馈,就能实现基于LQR的主动悬架控制。
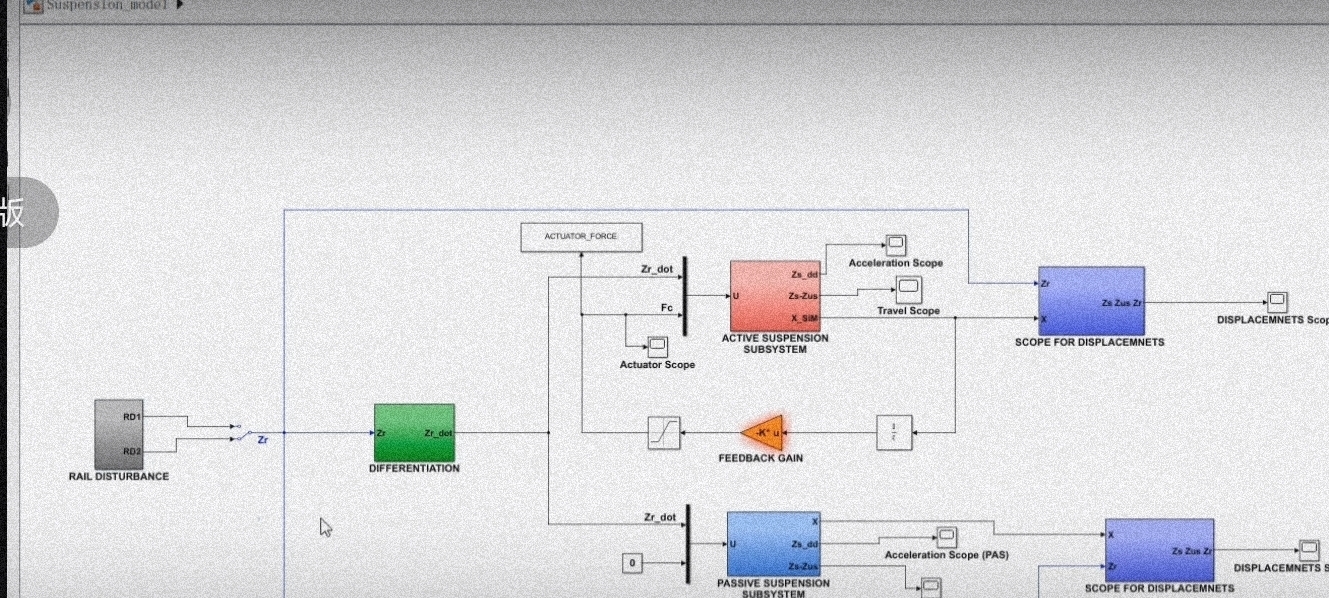
扰动输入与仿真
路面不平度就是系统的扰动输入。可以用白噪声经过成形滤波器来模拟路面不平度。在Simulink里添加这个扰动输入模块,连接到悬架模型的相应位置。
% 模拟路面不平度
fs = 100; % 采样频率
t = 0:1/fs:10; % 仿真时间
road_profile = wgn(size(t,2),1,0); % 白噪声设置好仿真参数,比如仿真时间为10秒,采样时间为0.01秒等,就可以运行仿真。
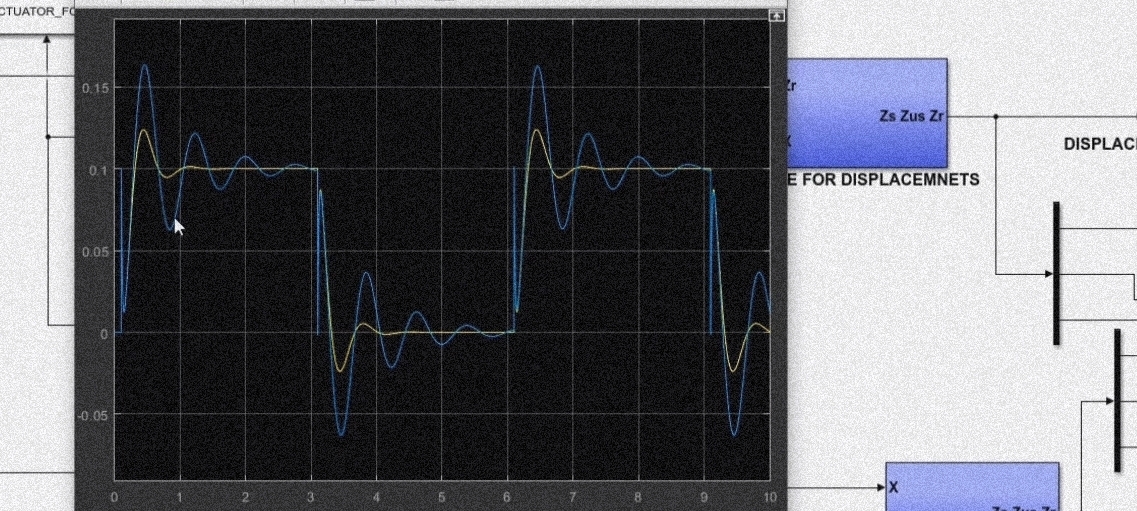
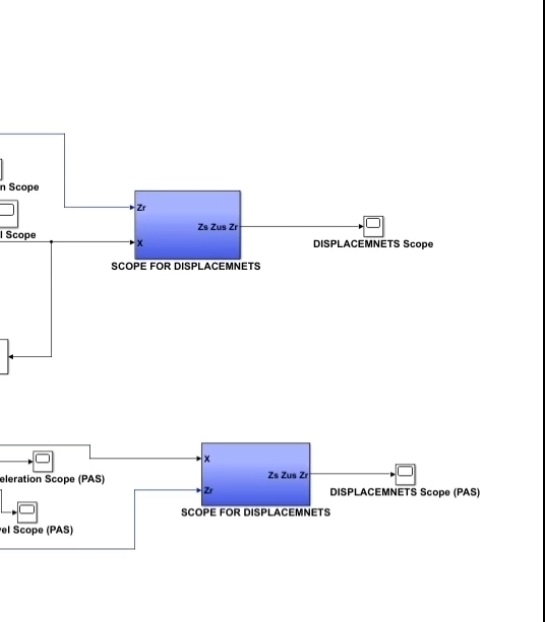
性能对比与结果分析
仿真结束后,对比两者的性能指标,像车身加速度、悬架动行程、轮胎动载荷等。一般来说,基于LQR的主动悬架能更有效地减小车身加速度,提高乘坐舒适性;同时也能在一定程度上控制悬架动行程和轮胎动载荷,保障车辆行驶安全性和操纵稳定性。相比之下,被动悬架虽然结构简单可靠,但性能提升空间有限。
配套资料与视频讲解
为了方便大家更好理解,有配套的本程序对应内容资料(伦纹),还有简单视频讲解。视频里会一步一步演示模型搭建、参数设置、仿真运行以及结果分析的全过程,帮助大家更快上手掌握这个仿真项目。
希望通过这次分享,大家对基于LQR的主动悬架控制和被动悬架的性能对比有更清晰的认识,在汽车悬架系统研究的道路上更进一步。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 2
2 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)