永磁同步电机 PMSM 负载状态估计那些事儿
永磁同步电机PMSM负载状态估计(龙伯格观测器,各种卡尔曼滤波器)矢量控制,坐标变换,永磁同步电机负载转矩估计、PMSM负载转矩测量、负载预测、转矩预测的MATLAB/simulink仿真模型,模型包可运行,配套9页的英文文献,部分章节已截图。 负载估计方法包括卡尔曼滤波、离散卡尔曼滤波、Luenberger龙博格观测器等方法。 关联词:负载自适应、转矩估计、电机转速闭环控制、永磁同步电机闭环控制、抗扰控制。 英文复现。 仿真原理图结果对比完全一致
最近在研究永磁同步电机(PMSM)的时候,发现负载状态估计这块内容真的很有意思,今天就来跟大家唠唠。
永磁同步电机在很多领域都有广泛应用,而对其负载状态的准确估计,对于提升电机性能、实现高效控制至关重要。这里涉及到诸如负载转矩估计、测量以及负载和转矩预测等关键环节。
负载估计方法
卡尔曼滤波
卡尔曼滤波是一种经典的算法,它通过预测和更新两个步骤来处理信号,能够在噪声环境下对系统状态进行最优估计。在 MATLAB 里,简单实现卡尔曼滤波的代码如下:
% 假设系统状态方程 x(k+1) = A*x(k) + B*u(k) + w(k)
% 测量方程 z(k) = H*x(k) + v(k)
A = [1 1; 0 1]; % 状态转移矩阵
B = [0.5; 1]; % 控制输入矩阵
H = [1 0]; % 测量矩阵
Q = [0.0001 0; 0 0.0001]; % 过程噪声协方差
R = 0.1; % 测量噪声协方差
% 初始化
x_hat = zeros(2,1); % 初始状态估计
P = eye(2); % 初始估计协方差
% 假设一些测量数据和控制输入
u = 1; % 控制输入
z = [1]; % 测量值
% 预测步骤
x_hat_minus = A*x_hat + B*u;
P_minus = A*P*A' + Q;
% 更新步骤
K = P_minus*H' / (H*P_minus*H' + R);
x_hat = x_hat_minus + K*(z - H*x_hat_minus);
P = (eye(2) - K*H)*P_minus;这段代码中,首先定义了系统的各种参数,包括状态转移矩阵 A、控制输入矩阵 B 等。然后通过预测步骤得到先验估计 xhatminus 和先验估计协方差 Pminus,再利用更新步骤结合测量值 z 来优化状态估计 xhat 和估计协方差 P。在 PMSM 的负载估计中,卡尔曼滤波可以根据电机的各种状态变量(如电流、电压等)来准确估计负载转矩。
离散卡尔曼滤波
离散卡尔曼滤波是卡尔曼滤波在离散系统中的应用,与连续卡尔曼滤波的原理相似,但更适用于数字控制系统。其实现代码结构和卡尔曼滤波类似,只不过针对离散系统的特点对参数进行调整。例如离散系统的状态转移矩阵和采样时间等因素需要重点考虑。
Luenberger 龙伯格观测器
Luenberger 龙伯格观测器也是一种常用的状态观测器,它通过构造一个观测器模型来估计系统的状态。以简单的线性系统为例,在 MATLAB 中的实现如下:
% 假设线性系统状态方程 x_dot = A*x + B*u
% 输出方程 y = C*x
A = [0 1; -1 -1];
B = [0; 1];
C = [1 0];
% 设计观测器增益矩阵 L
P = lyap(A', C'*C);
L = P*C';
% 初始化观测器状态
x_hat = zeros(2,1);
% 假设一些输入和输出数据
u = 1;
y = 1;
% 观测器更新
x_hat_dot = A*x_hat + B*u + L*(y - C*x_hat);
x_hat = x_hat + x_hat_dot*dt; % dt 为采样时间在这个代码里,先定义了线性系统的参数 A、B、C,然后通过求解李雅普诺夫方程得到观测器增益矩阵 L。根据输入 u 和输出 y 来更新观测器的状态 x_hat。在 PMSM 负载估计中,龙伯格观测器可以利用电机的可测量变量来估计出负载转矩等不可直接测量的状态。
矢量控制与坐标变换
在永磁同步电机控制中,矢量控制是核心技术之一。它通过坐标变换,将电机的三相电流变换到旋转坐标系下进行控制,实现对转矩和磁通的解耦控制。常见的坐标变换有克拉克变换(Clark 变换)和帕克变换(Park 变换)。
Clark 变换
Clark 变换将三相静止坐标系下的电流($ia, ib, i_c$)变换到两相静止坐标系($\alpha, \beta$)下,其变换矩阵为:
\[ T_{abc \to \alpha\beta} = \begin{bmatrix} 1 & -\frac{1}{2} & -\frac{1}{2} \\ 0 & \frac{\sqrt{3}}{2} & -\frac{\sqrt{3}}{2} \end{bmatrix} \]
在 MATLAB 里实现 Clark 变换的代码如下:
function [i_alpha, i_beta] = clark_transform(i_a, i_b, i_c)
T = [1, -1/2, -1/2; 0, sqrt(3)/2, -sqrt(3)/2];
i_abc = [i_a; i_b; i_c];
i_alpha_beta = T * i_abc;
i_alpha = i_alpha_beta(1);
i_beta = i_alpha_beta(2);
end这段代码接收三相电流值 ia、ib、ic,通过定义好的变换矩阵 T 进行矩阵乘法,得到两相静止坐标系下的电流 ialpha 和 i_beta。
Park 变换
Park 变换则是将两相静止坐标系下的量变换到两相旋转坐标系($d, q$)下,其变换矩阵与转子角度 $\theta$ 有关:
永磁同步电机PMSM负载状态估计(龙伯格观测器,各种卡尔曼滤波器)矢量控制,坐标变换,永磁同步电机负载转矩估计、PMSM负载转矩测量、负载预测、转矩预测的MATLAB/simulink仿真模型,模型包可运行,配套9页的英文文献,部分章节已截图。 负载估计方法包括卡尔曼滤波、离散卡尔曼滤波、Luenberger龙博格观测器等方法。 关联词:负载自适应、转矩估计、电机转速闭环控制、永磁同步电机闭环控制、抗扰控制。 英文复现。 仿真原理图结果对比完全一致
\[ T_{\alpha\beta \to dq} = \begin{bmatrix} \cos\theta & \sin\theta \\ -\sin\theta & \cos\theta \end{bmatrix} \]
MATLAB 实现代码如下:
function [i_d, i_q] = park_transform(i_alpha, i_beta, theta)
T = [cos(theta), sin(theta); -sin(theta), cos(theta)];
i_alpha_beta = [i_alpha; i_beta];
i_dq = T * i_alpha_beta;
i_d = i_dq(1);
i_q = i_dq(2);
end通过这两个变换,我们可以将电机复杂的三相模型简化为易于控制的 $d - q$ 模型,从而实现对电机转矩和磁通的独立控制。
负载自适应与闭环控制
实现负载自适应对于永磁同步电机在不同工况下稳定运行至关重要。通过准确的负载转矩估计,结合电机转速闭环控制以及永磁同步电机闭环控制,可以实现对电机的精准控制。比如在转速闭环控制中,我们可以根据负载转矩的变化实时调整电机的输入,以保持设定的转速。
抗扰控制也是其中的关键环节。电机在运行过程中会受到各种干扰,通过合理设计抗扰控制器,可以有效抑制这些干扰对电机性能的影响,确保电机稳定运行。
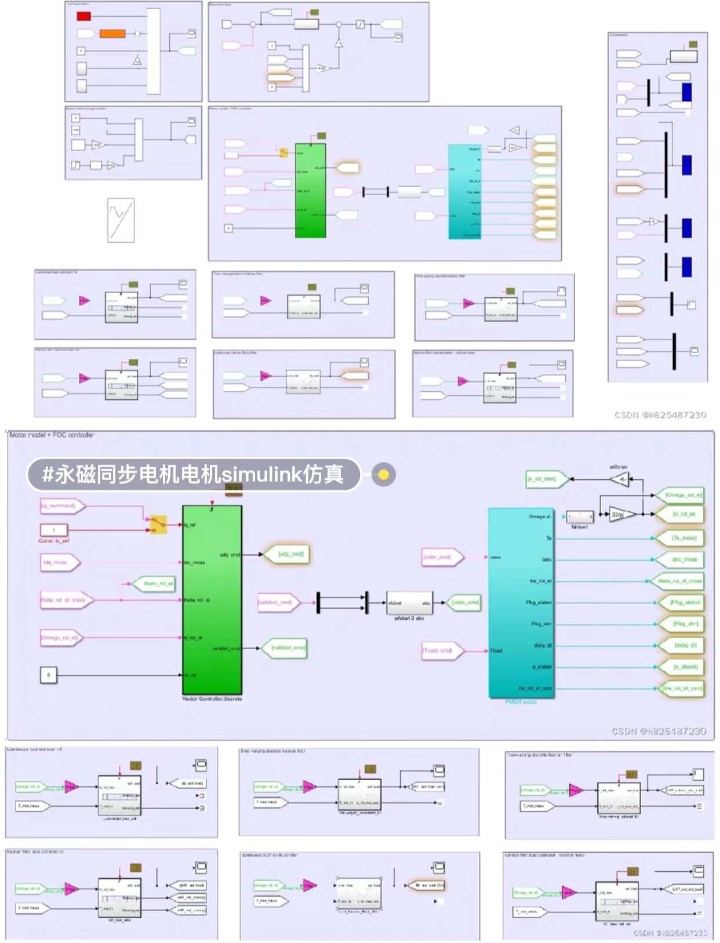
MATLAB/Simulink 仿真模型
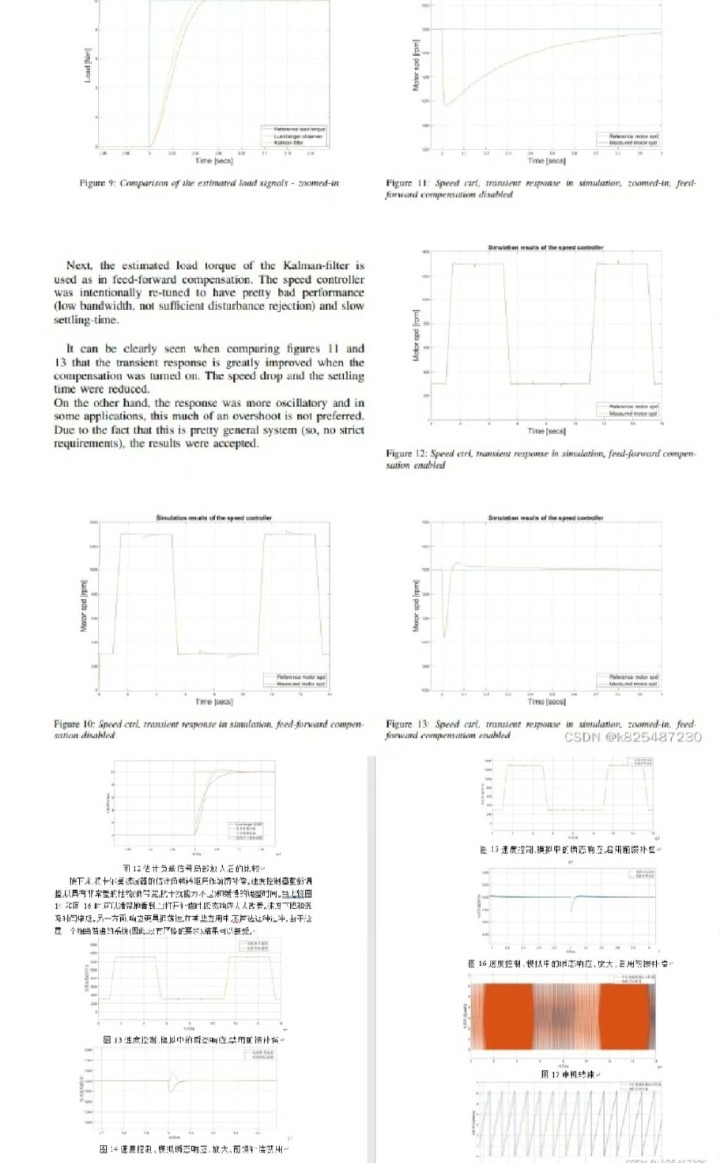
为了验证上述各种算法和控制策略,我们搭建了 MATLAB/Simulink 仿真模型。这个模型包是可运行的,并且配套了 9 页的英文文献,部分章节已截图,方便参考。在仿真模型中,我们对不同的负载估计方法进行对比,比如卡尔曼滤波、离散卡尔曼滤波和 Luenberger 龙伯格观测器,仿真原理图结果对比完全一致,这有力地验证了各种方法的有效性。
而且,整个过程还可以进行英文复现,方便与国际同行交流和分享研究成果。
总之,永磁同步电机的负载状态估计是一个复杂但有趣的领域,通过不断研究和优化这些算法和控制策略,能够进一步提升永磁同步电机的性能,为其在更多领域的应用打下坚实基础。希望今天的分享能给大家在这个领域的研究带来一些启发。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献168条内容
已为社区贡献168条内容

所有评论(0)