ADRC自抗扰控制永磁同步电机矢量控制调速系统Matlab仿真模型探究
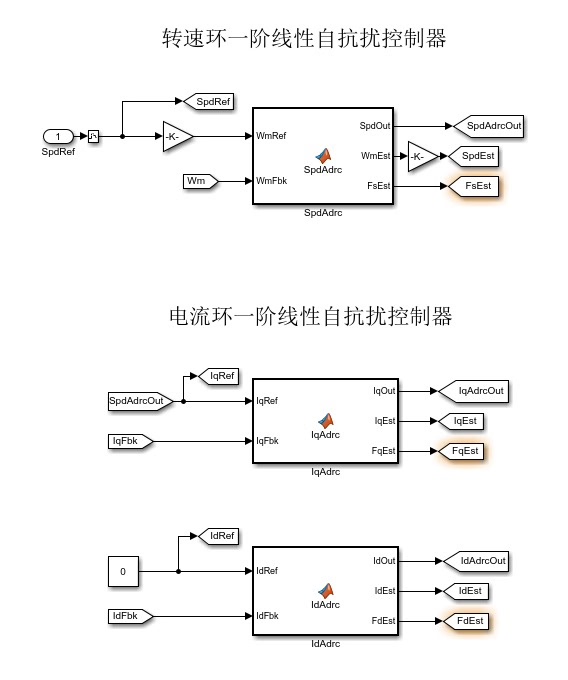
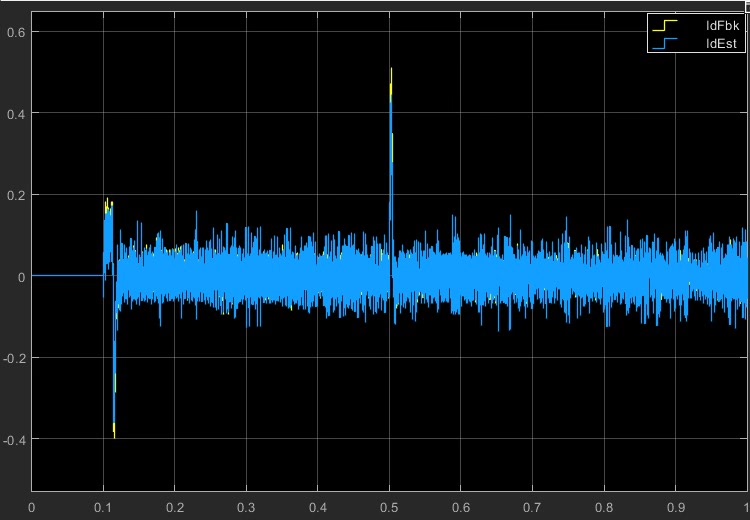
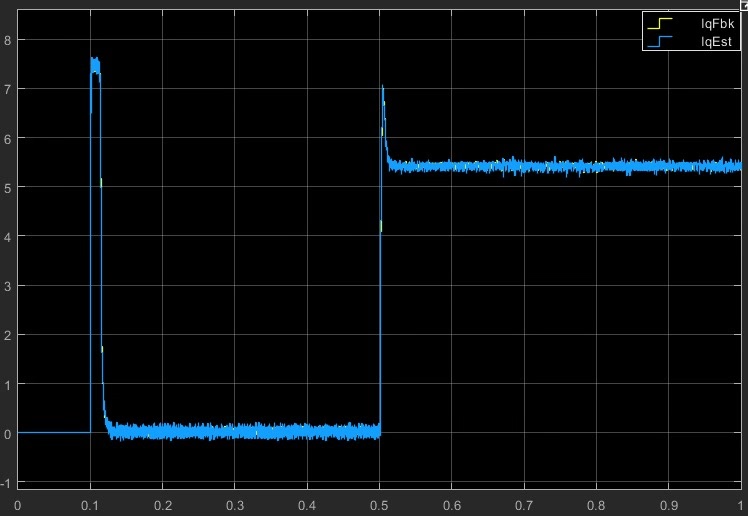
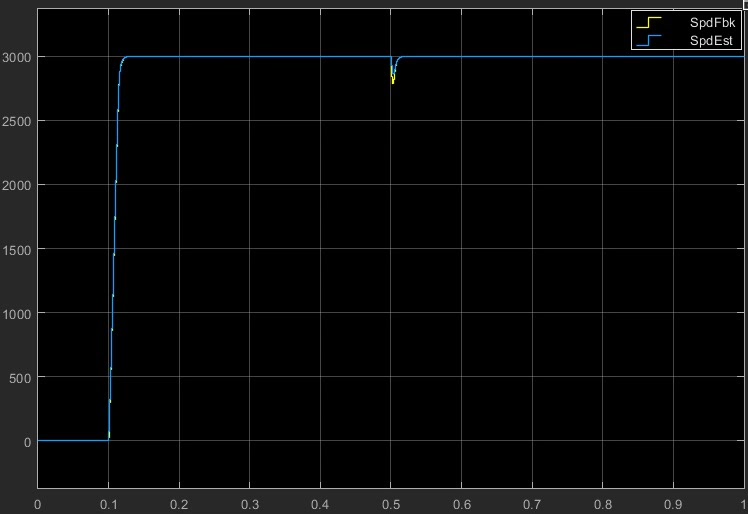
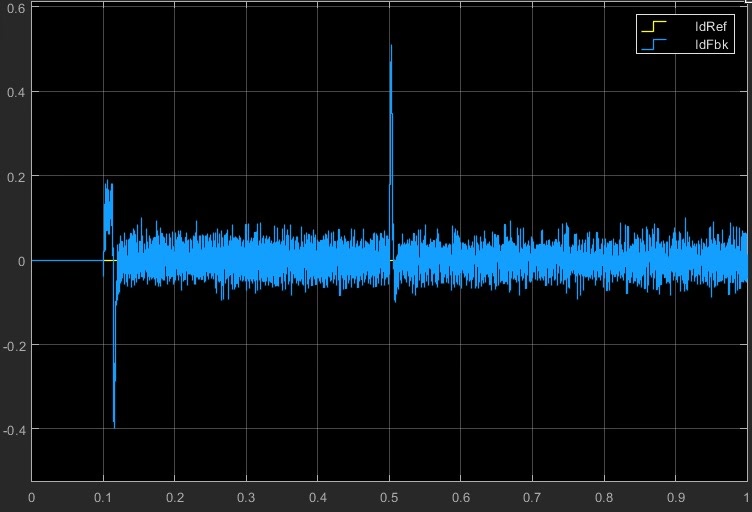
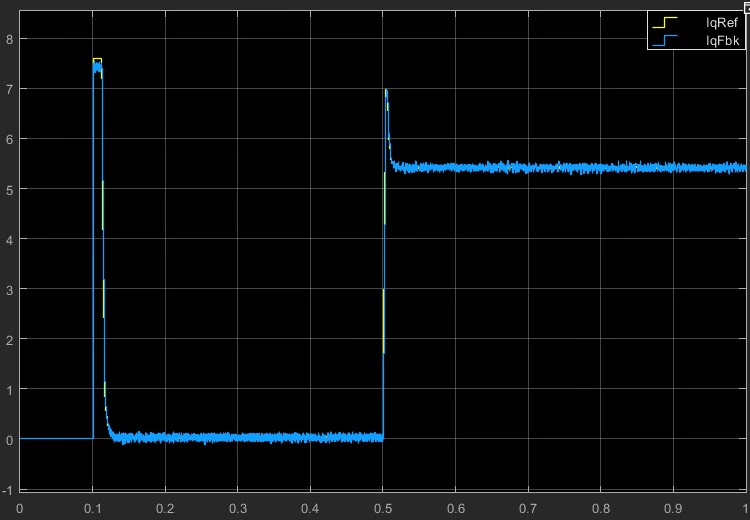
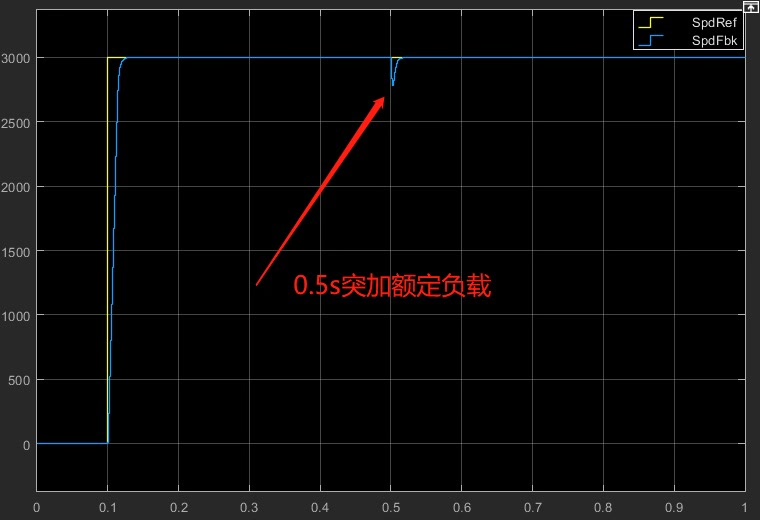
ADRC自抗扰控制永磁同步电机矢量控制调速系统Matlab仿真模型 1.模型简介 模型为基于自抗扰控制(ADRC)的永磁同步电机矢量控制仿真,采用Matlab R2018a/Simulink搭建。 模型内主要包含DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark、采用一阶线性自抗扰控制器的速度环和电流环等模块,其中,SVPWM、Clark、Park、Ipark、线性自抗扰控制器模块采用Matlab funtion编写,其与C语言编程较为接近,容易进行实物移植。 模型均采用离散化仿真,其效果更接近实际数字控制系统。 2.算法简介 永磁同步电机调速系统由转速环和电流环构成,均采用一阶线性自抗扰控制器。 在电流环中,自抗扰控制器将电压耦合项视为扰动观测并补偿,能够实现电流环解耦;在转速环中,由于自抗扰控制器无积分环节,因此无积分饱和现象,无需抗积分饱和算法,转速阶跃响应无超调。 自抗扰控制器的快速性和抗扰性能较好,其待整定参数少,且物理意义明确,比较容易调整。 3.仿真效果 ① 转速响应波形 -- 阶跃响应无超调,如下图1所示。 ② Iq电流响应波形,如下图2所示。 ③ Id电流响应波形,如下图3所示。 ④ 转速观测波形,如下图4所示。 ⑤ Iq电流观测波形,如下图5所示。 ⑥ Id电流观测波形,如下图6所示。 4. 可提供模型内相关算法的参考文献,避免大 量阅读文献浪费时间。
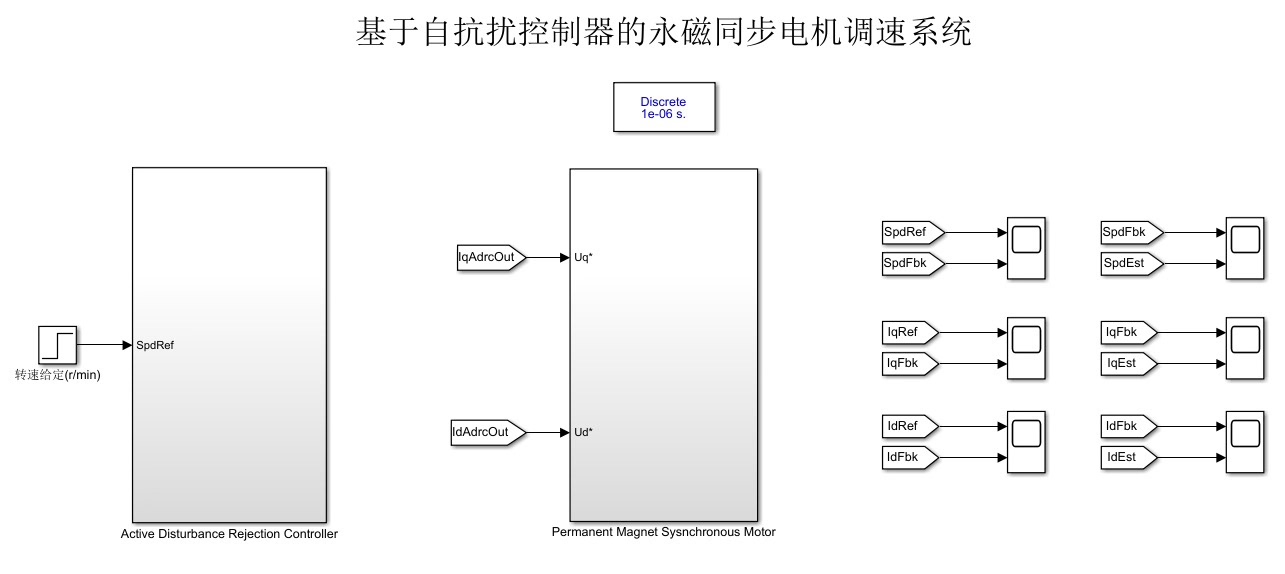
在电机控制领域,如何实现高精度、高性能的调速控制一直是研究热点。今天咱们来聊聊基于自抗扰控制(ADRC)的永磁同步电机矢量控制仿真模型,这个模型是用Matlab R2018a/Simulink搭建的哦。
一、模型简介
这个模型里的“家伙事儿”还挺多,主要有DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark,还有采用一阶线性自抗扰控制器的速度环和电流环等模块。这里面的SVPWM、Clark、Park、Ipark以及线性自抗扰控制器模块,都是用Matlab function编写的,这就有意思了,为啥呢?因为它和C语言编程很接近,以后要是想搞实物移植,那可就方便多啦。
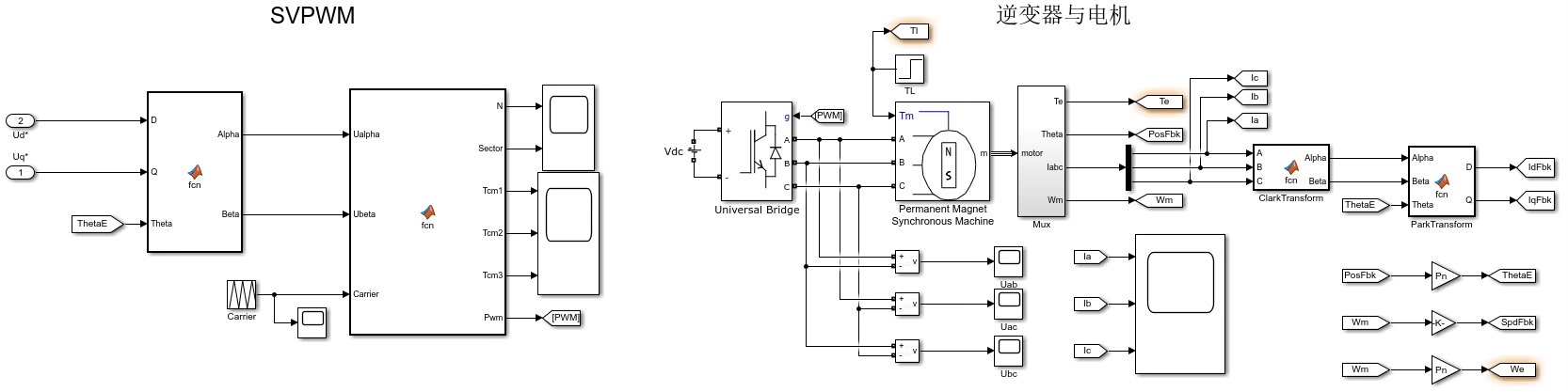
而且这个模型采用离散化仿真,这样一来,仿真效果就更贴近实际的数字控制系统。想象一下,咱们搭建的这个模型就像是一个虚拟的实际控制系统,每个模块都各司其职。
比如说SVPWM模块,在Matlab function里大概是这样写的(以下代码仅为示意简化):
function [Sabc] = SVPWM(Vref)
% 计算扇区
alpha = atan2(Vref(2), Vref(1));
if alpha >= 0 && alpha < pi/3
sector = 1;
elseif alpha >= pi/3 && alpha < 2*pi/3
sector = 2;
% 其他扇区判断省略
end
% 计算占空比
% 这里省略复杂计算
% 根据占空比生成三相开关信号
Sabc = [Sa; Sb; Sc];
end这段代码就是根据输入的参考电压Vref,先计算出扇区,然后根据扇区计算占空比,最后生成三相开关信号Sabc。这个Sabc信号就会用来控制三相逆变器,让电机按我们想要的方式运转。
二、算法简介
永磁同步电机调速系统是由转速环和电流环构成的,这俩环都采用一阶线性自抗扰控制器。
ADRC自抗扰控制永磁同步电机矢量控制调速系统Matlab仿真模型 1.模型简介 模型为基于自抗扰控制(ADRC)的永磁同步电机矢量控制仿真,采用Matlab R2018a/Simulink搭建。 模型内主要包含DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark、采用一阶线性自抗扰控制器的速度环和电流环等模块,其中,SVPWM、Clark、Park、Ipark、线性自抗扰控制器模块采用Matlab funtion编写,其与C语言编程较为接近,容易进行实物移植。 模型均采用离散化仿真,其效果更接近实际数字控制系统。 2.算法简介 永磁同步电机调速系统由转速环和电流环构成,均采用一阶线性自抗扰控制器。 在电流环中,自抗扰控制器将电压耦合项视为扰动观测并补偿,能够实现电流环解耦;在转速环中,由于自抗扰控制器无积分环节,因此无积分饱和现象,无需抗积分饱和算法,转速阶跃响应无超调。 自抗扰控制器的快速性和抗扰性能较好,其待整定参数少,且物理意义明确,比较容易调整。 3.仿真效果 ① 转速响应波形 -- 阶跃响应无超调,如下图1所示。 ② Iq电流响应波形,如下图2所示。 ③ Id电流响应波形,如下图3所示。 ④ 转速观测波形,如下图4所示。 ⑤ Iq电流观测波形,如下图5所示。 ⑥ Id电流观测波形,如下图6所示。 4. 可提供模型内相关算法的参考文献,避免大 量阅读文献浪费时间。
在电流环里,自抗扰控制器把电压耦合项当作扰动来观测并补偿,就像给电机的电流环做了一个“智能解耦助手”,这样电流环就能很好地解耦啦。咱们看看简单的电流环自抗扰控制器代码(同样简化示意):
function [u] = ADRC_current(i_ref, i, x1, x2, b0)
e = i_ref - i;
x1_dot = x2 - b0 * e;
% 假设扰动估计为0(实际更复杂)
u = (x1_dot - x2) / b0;
% 更新状态变量
x1 = x1 + dt * x1_dot;
x2 = x2 + dt * 0;
end这里i_ref是电流参考值,i是实际电流值,x1和x2是状态变量,b0是控制器参数。通过计算误差e,然后根据自抗扰控制的原理更新状态变量,最后得出控制量u,来调整电流。
在转速环中,自抗扰控制器没有积分环节,这可就避免了积分饱和现象,也就不用专门搞抗积分饱和算法了,而且转速阶跃响应还没有超调。它就像一个聪明的小管家,快速又精准地控制着转速。自抗扰控制器不仅快速性和抗扰性能好,待整定的参数还少,物理意义也明确,调整起来就没那么费劲。
三、仿真效果
- 转速响应波形:阶跃响应无超调,就像一辆车平稳加速,没有突然的“前冲”,这对电机稳定运行可太重要了。
- Iq电流响应波形:从图中可以看到Iq电流能快速跟踪参考值,就像一个忠诚的追随者,主人(参考值)去哪它就去哪。
- Id电流响应波形:同样能很好地符合预期,稳定地保持在一定范围。
- 转速观测波形:清晰展示了电机转速的变化情况,帮助我们直观了解电机运行状态。
- Iq电流观测波形 和 6. Id电流观测波形 也都能准确反映电流的实际情况。
四、参考文献支持
要是你对模型内相关算法感兴趣,我这还能提供参考文献呢,不用你再费劲巴拉地去大量阅读文献找资料啦,直接站在巨人的肩膀上继续研究,是不是很贴心。
通过这个ADRC自抗扰控制永磁同步电机矢量控制调速系统Matlab仿真模型,我们能更深入地了解电机控制算法,说不定还能为以后的实际应用开发出更厉害的成果呢。希望大家都能在电机控制的研究中找到乐趣,探索出更多可能!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 12
12 0
0- 0



 已为社区贡献35条内容
已为社区贡献35条内容

所有评论(0)