计算滑膜面
基于滑膜观测器和MTPA的内置式永磁同步电机无位置传感器模型
内置式永磁同步电机(IPMSM)因其高效率、高功率密度和高精度控制特性,在工业自动化和电动汽车领域得到了广泛应用。然而,传统的IPMSM控制通常依赖于机械位置传感器,这不仅增加了系统成本,还可能引入可靠性问题。因此,无位置传感器控制技术逐渐成为研究热点。
无位置传感器控制的核心在于准确估计转子的位置和速度,而滑膜观测器(Sliding Mode Observer, SMO)和最大转矩电流比(Maximum Torque Per Ampere, MTPA)控制的结合为这一问题提供了一种有效的解决方案。本文将从滑膜观测器的设计出发,结合MTPA控制策略,探讨一种基于无位置传感器的IPMSM控制模型。
滑膜观测器的设计与实现
滑膜观测器是一种非线性观测器,以其鲁棒性和快速收敛性著称。在IPMSM中,滑膜观测器可以用来估计转子的位置和速度,从而实现无传感器控制。
滑膜观测器的基本原理
滑膜观测器的设计基于滑膜控制理论,其核心思想是通过构造一个切换函数,使得系统状态在有限时间内达到滑膜面。对于IPMSM,滑膜观测器的状态方程可以表示为:
\[
\begin{cases}
\dot{\hat{\theta}} = \omegar + \frac{Ld - Lq}{Lq} \hat{\theta} + k_s \text{sign}(\sigma) \\
\dot{\sigma} = \dot{\hat{\theta}} - \omega_r
\end{cases}
\]
基于滑膜观测器和MTPA的内置式永磁同步电机无位置传感器模型
其中,\(\hat{\theta}\) 是转子位置的估计值,\(\omegar\) 是转子速度,\(Ld\) 和 \(Lq\) 是d轴和q轴的电感,\(ks\) 是滑膜增益,\(\sigma\) 是滑膜面。
滑膜观测器的代码实现
以下是一个滑膜观测器的简单实现代码:
def sliding_mode_observer(u_d, u_q, theta_est, sigma, k_s, L_d, L_q, dt):
sigma_dot = (k_s * np.sign(sigma) + (L_d - L_q)/L_q * theta_est) / dt
# 更新转子位置估计
theta_est = theta_est + sigma_dot * dt
# 更新滑膜面
sigma = sigma + sigma_dot * dt
return theta_est, sigma
# 参数初始化
k_s = 100 # 滑膜增益
L_d = 0.01 # d轴电感
L_q = 0.02 # q轴电感
dt = 0.001 # 采样时间
theta_est = 0 # 初始转子位置估计
sigma = 0 # 初始滑膜面参数选择与分析
在代码中,滑膜增益 \(ks\) 和电感值 \(Ld\)、\(Lq\) 的选择对观测器的性能至关重要。较大的 \(ks\) 可以加快收敛速度,但可能导致系统抖振;较小的 \(ks\) 则会降低收敛速度。因此,需要通过实验或仿真来选择合适的 \(ks\) 值。
MTPA控制策略
MTPA控制的目标是在给定电流幅值下,使输出转矩最大化。对于IPMSM,MTPA控制可以通过调整d轴和q轴的电流比例来实现。
MTPA控制的基本原理
MTPA控制的核心在于优化电流矢量的方向。对于IPMSM,转矩可以表示为:
\[
Te = \frac{3}{2} p \left( \frac{Ld - Lq}{Lq} id iq + \frac{\lambdar}{Lq} i_q^2 \right)
\]
其中,\(p\) 是极对数,\(\lambda_r\) 是永磁体磁链。
为了最大化转矩,需要调整 \(id\) 和 \(iq\) 的比例。通过求导可以得到最优比例:
\[
\frac{id}{iq} = \frac{\lambdar}{Ld - L_q}
\]
MTPA控制的代码实现
以下是一个MTPA控制的简单实现代码:
def mtpa_control(i_d, i_q, lambda_r, L_d, L_q):
# 计算最优电流比例
optimal_id_iq = lambda_r / (L_d - L_q)
# 计算转矩
torque = 1.5 * p * ( ( (L_d - L_q)/L_q ) * i_d * i_q + (lambda_r / L_q) * i_q**2 )
return torque, optimal_id_iq
# 参数初始化
lambda_r = 0.1 # 永磁体磁链
p = 4 # 极对数
i_d = 1 # d轴电流
i_q = 2 # q轴电流MTPA控制的分析
在代码中,MTPA控制通过计算最优电流比例来实现转矩的最大化。需要注意的是,MTPA控制仅适用于稳态运行条件,而在动态运行条件下,可能需要结合其他控制策略(如速度控制)来保证系统稳定性。
滑膜观测器与MTPA控制的结合
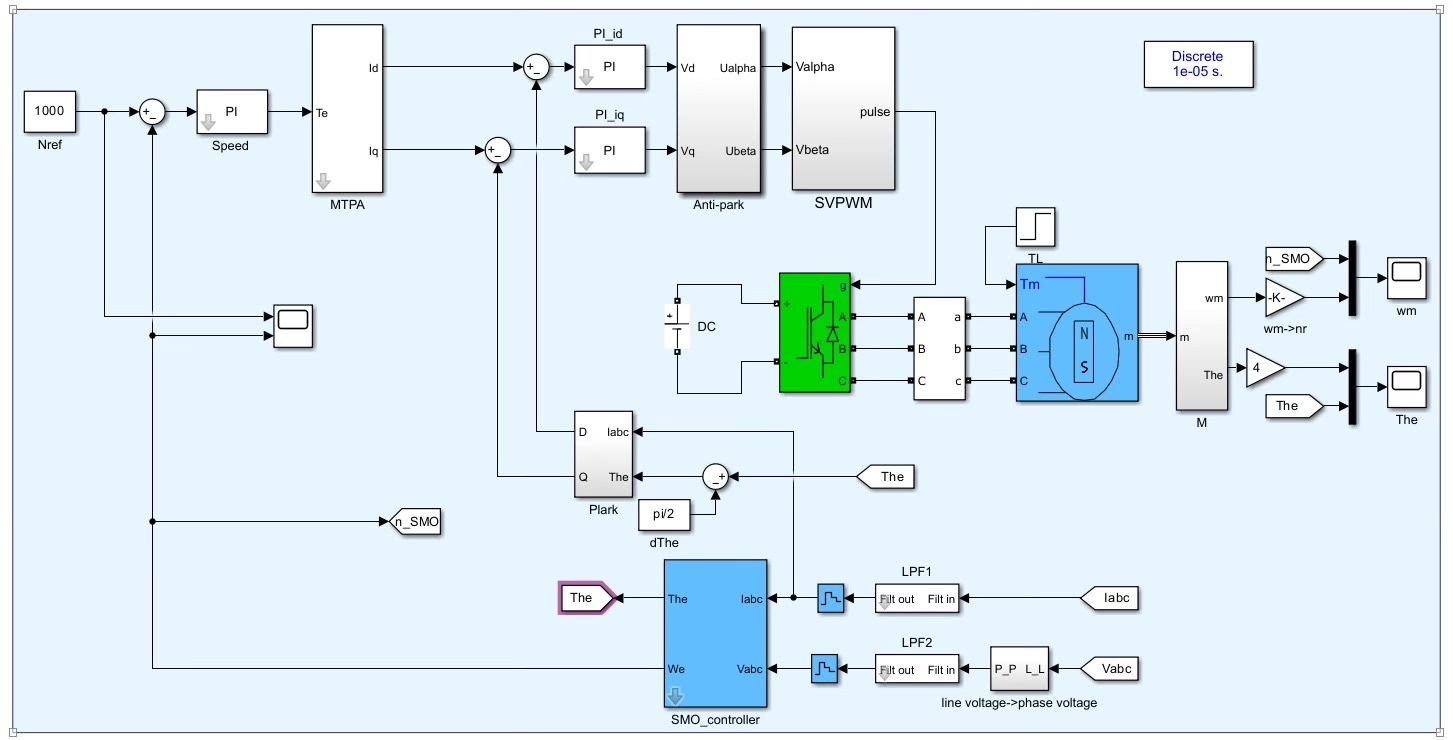
将滑膜观测器与MTPA控制结合,可以实现IPMSM的无位置传感器控制。具体来说,滑膜观测器用于估计转子的位置和速度,而MTPA控制用于优化电流矢量的方向,从而实现高效控制。
结合后的代码实现
以下是一个结合滑膜观测器和MTPA控制的简单实现代码:
def ipmsm_control(u_d, u_q, theta_est, sigma, k_s, L_d, L_q, lambda_r, p, dt):
# 滑膜观测器部分
theta_est, sigma = sliding_mode_observer(u_d, u_q, theta_est, sigma, k_s, L_d, L_q, dt)
# MTPA控制部分
torque, optimal_id_iq = mtpa_control(i_d, i_q, lambda_r, L_d, L_q)
return theta_est, sigma, torque, optimal_id_iq
# 参数初始化
u_d = 10 # d轴电压
u_q = 20 # q轴电压结合后的分析
在结合后的系统中,滑膜观测器负责估计转子的位置和速度,而MTPA控制负责优化电流矢量的方向。通过这种方式,系统可以在无位置传感器的情况下实现高效控制。需要注意的是,滑膜观测器的性能对整个系统的稳定性至关重要,因此需要选择合适的参数。
总结
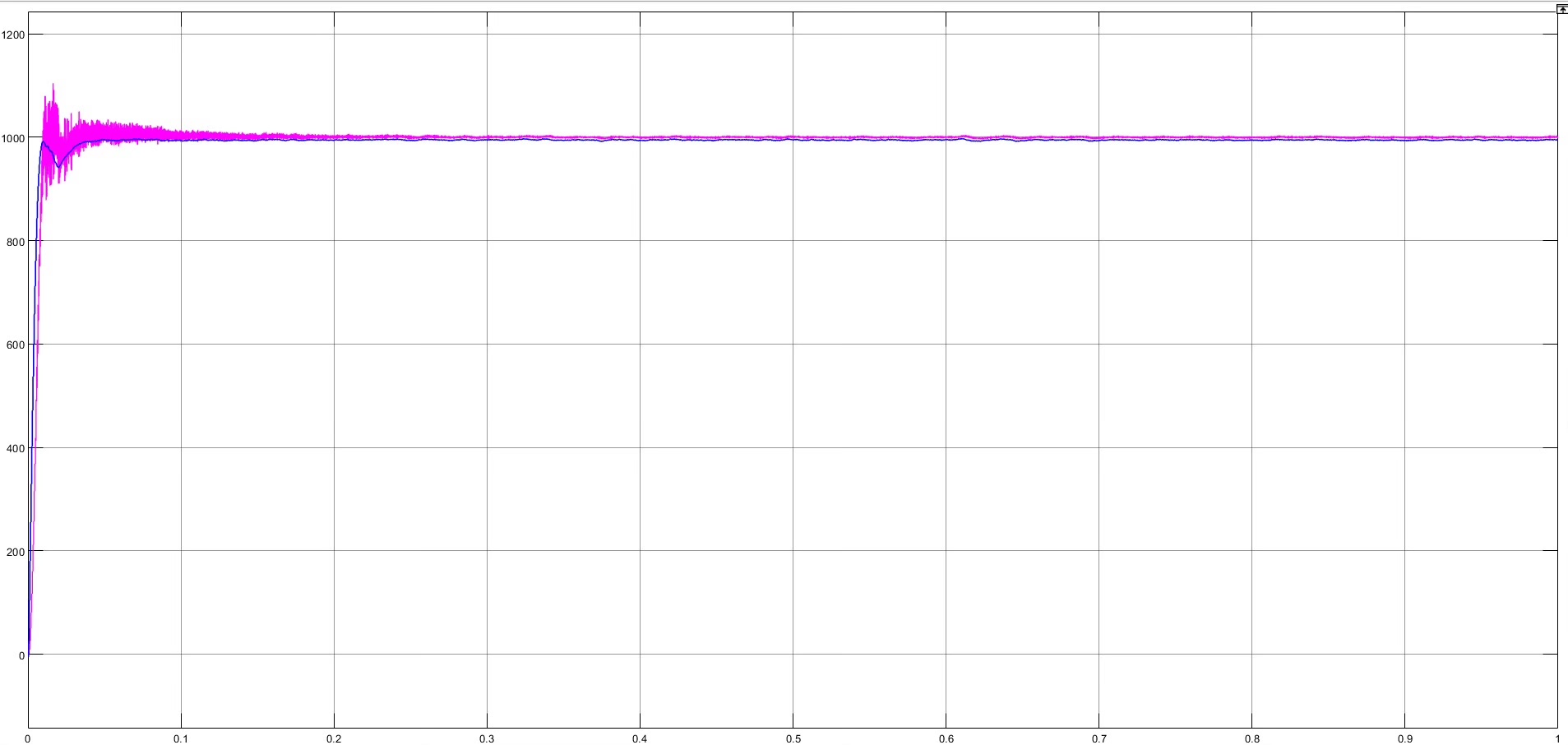
基于滑膜观测器和MTPA控制的无位置传感器IPMSM控制模型,是一种高效、鲁棒的控制方案。通过合理选择滑膜观测器的参数和优化MTPA控制策略,可以实现IPMSM的高效控制。未来的研究可以进一步探讨如何在动态运行条件下优化滑膜观测器的性能,以及如何结合其他控制策略(如速度控制)来提高系统的整体性能。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 8
8 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)