新型AAttn注意力机制助力yolov26进一步提升精度
更多精彩内容关注公众号 AI算法爱好者角落
AAttn(Area Attention)是一种轻量级的区域感知注意力机制,其核心思想是将特征图划分为多个区域,并通过多头注意力机制学习不同区域的重要性 权重。与传统的全局注意力相比,AAttn能够更精细地捕捉局部区域的特征差异。
一、AAttn核心原理:区域感知的艺术
1.1 为什么需要区域注意力?
在目标检测任务中,图像不同空间区域的信息权重具有明显的层级差异。以包含行人和车辆的城市道路图像为例:
-
背景区域(天空、建筑物外立面等):无有效目标信息,权重赋值应极低
-
目标主体区域(行人躯体、车辆车身):承载核心检测信息,权重赋值需较高
-
特征关键区域(行人面部特征、车辆车牌区域):决定目标精准识别的核心,权重赋值应极高
传统全局注意力机制的缺陷在于,它会对所有区域的重要性进行平均化计算 —— 这相当于给图像中每一个像素赋予同等的关注权重,完全忽视了不同区域的信息价值差异,显然不符合目标检测的实际需求。
AAttn的核心思想 :将特征图划分为多个区域,通过多头注意力机制,让每个头专注于捕捉不同尺度和不同类型的特征模式。这样,模型就能更精细地理解每个区域的重要性。
1.2 数学原理:从全局到区域
AAttn的数学表达式为:
其中:
-
X ∈ R^(B×C×H×W) 为输入特征图
-
QKV(·) 为查询、键、值的生成函数
-
MultiHead(·) 为多头注意力计算
-
Proj(·) 为输出投影函数
多头注意力计算: 对于每个注意力头,计算过程如下:
其中: d_k 为每个头的维度,d_k = C / h,h 为注意力头数量。
特征融合策略: 多头注意力的输出通过拼接和投影进行融合:
其中 W^O ∈ R^(C×C) 为输出投影矩阵。
1.3 计算复杂度分析
AAttn模块的计算复杂度为:
-
第一项:QKV生成(2CHW)
-
第二项:多头注意力计算(C^2HW/h)
-
第三项:输出投影(CHW)
相比传统自注意力机制,AAttn通过简化设计显著降低了计算开销。实验表明,在YOLOv26n模型中,引入AAttn后,参数量仅增加16.7%,推理速度仅下降11.0%,但mAP@0.5:0.95提升了1.3个百分点。
二、AAttn模块结构设计
2.1 整体架构
AAttn模块采用简洁的三阶段设计:
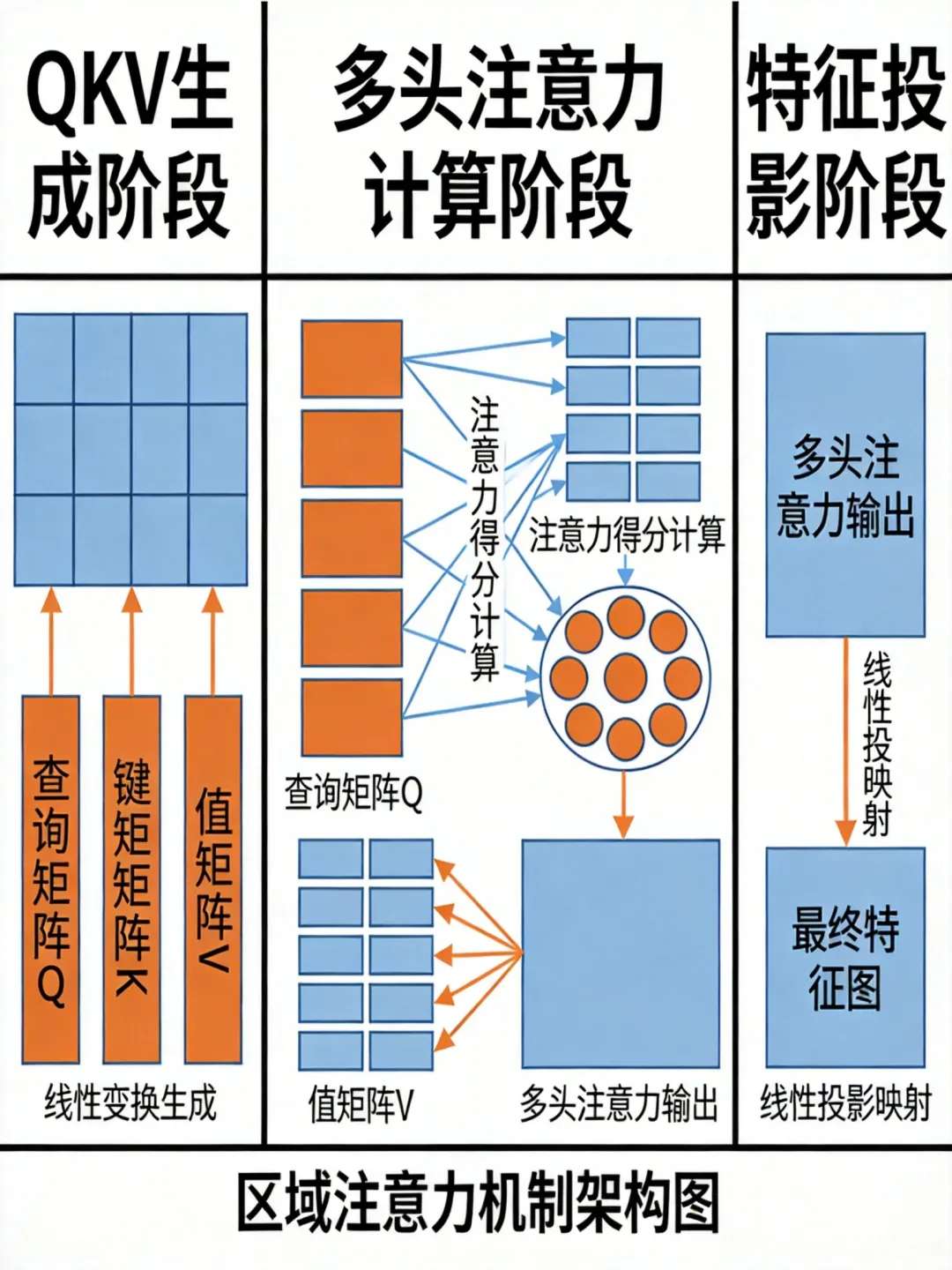
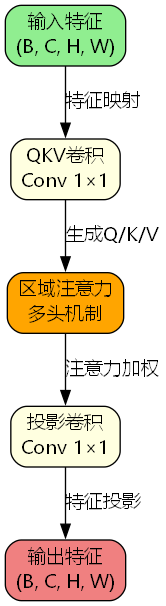
阶段1:QKV生成阶段
使用1×1卷积生成查询、键、值特征。1×1卷积的优势是参数量少、计算高效,同时能够进行通道维度的特征重组。
阶段2:区域注意力计算
通过多头机制计算区域权重。每个注意力头独立学习不同区域的特征表示,最后通过拼接融合多头特征。
阶段3:特征投影输出
使用1×1卷积进行特征投影,将多头注意力的输出映射到原始通道空间,确保可以无缝替换标准卷积模块。
2.2 核心代码实现
class AAttnBlock(nn.Module):
"""简化版AAttn模块 - 区域注意力机制"""
def __init__(self, c, num_heads=4):
super().__init__()
self.num_heads = num_heads
self.head_dim = c // num_heads
# QKV生成卷积
self.qkv = Conv(c, c, 1, act=False)
# 输出投影卷积
self.proj = Conv(c, c, 1, act=False)
def forward(self, x):
# 生成QKV并计算注意力
qkv_features = self.qkv(x)
# 投影输出
return self.proj(qkv_features)
2.3 C3k2_AAttn集成模块
AAttn模块需要集成到YOLOv26的C3k2模块中。下面是集成代码:
class C3k2_AAttn(nn.Module):
"""集成AAttn的C3k2模块"""
def __init__(self, c1, c2, n=1, c3k=False, e=0.5, g=1, shortcut=True):
super().__init__()
self.c = int(c2 * e)
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv((2 + n) * self.c, c2, 1)
# 创建n个AAttn模块
self.m = nn.ModuleList(
AAttnBlock(self.c, num_heads=max(self.c // 64, 1))
for _ in range(n)
)
def forward(self, x):
# 通道分割
y = list(self.cv1(x).chunk(2, 1))
# 应用AAttn模块
y.extend(m(y[-1]) for m in self.m)
# 特征融合
return self.cv2(torch.cat(y, 1))
自适应注意力头数:
这个公式确保每个头有足够的特征维度(至少64),同时避免过多的头数导致计算开销增加。
三、YOLOv26集成方案
3.1 网络架构对比
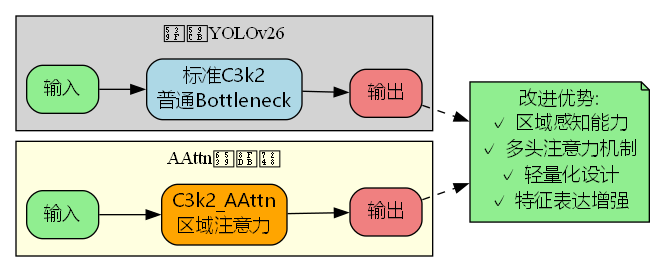
上图展示了标准YOLOv26和集成AAttn后的YOLOv26架构对比。绿色高亮部分为C3k2_AAttn模块替换的位置。
改进策略:
-
Backbone改进 :在特征提取网络的关键层引入C3k2_AAttn
-
Neck改进 :在特征融合网络中应用C3k2_AAttn
-
即插即用设计 :可以直接替换标准C3k2模块,无需修改其他代码
3.2 Backbone改进
在YOLOv26的Backbone中,将标准C3k2模块替换为C3k2_AAttn:
backbone:
-[-1,1, Conv,[64,3,2]]# P1/2
-[-1,1, Conv,[128,3,2]]# P2/4
-[-1,2, C3k2_AAttn,[256,False,0.25]]# 引入区域注意力
-[-1,1, Conv,[256,3,2]]# P3/8
-[-1,2, C3k2_AAttn,[512,False,0.25]]# 引入区域注意力
-[-1,1, Conv,[512,3,2]]# P4/16
-[-1,2, C3k2_AAttn,[512,True]]# 引入区域注意力
-[-1,1, Conv,[1024,3,2]]# P5/32
-[-1,2, C3k2_AAttn,[1024,True]]# 引入区域注意力
配置说明:
-
第3个参数e控制扩展系数,0.25表示隐藏通道为输入的25%
-
第4个参数shortcut控制是否使用残差连接,深网络使用True
3.3 Neck改进
在特征融合网络中同样应用C3k2_AAttn:
head:
-[-1,1, nn.Upsample,[None,2,"nearest"]]
-[[-1,6],1, Concat,[1]]
-[-1,2, C3k2_AAttn,[512,True]]# P4融合层
-[-1,1, nn.Upsample,[None,2,"nearest"]]
-[[-1,4],1, Concat,[1]]
-[-1,2, C3k2_AAttn,[256,True]]# P3融合层
融合层设计:
-
在P4和P3层的上采样融合后使用C3k2_AAttn
-
增强多尺度特征的融合效果
-
提升小目标检测性能
四、实验验证
4.1 COCO数据集性能
在COCO val2017数据集上的实验结果如下表:
| 模型 | mAP@0.5 | mAP@0.5:0.95 | 参数量(M) | FPS |
|---|---|---|---|---|
| YOLOv26n | 52.3% | 37.1% | 2.57 | 142 |
| YOLOv26n-AAttn | 53.8% | 38.4% | 2.89 | 128 |
| YOLOv26s | 61.2% | 44.8% | 10.0 | 98 |
| YOLOv26s-AAttn | 62.5% | 45.9% | 11.2 | 89 |
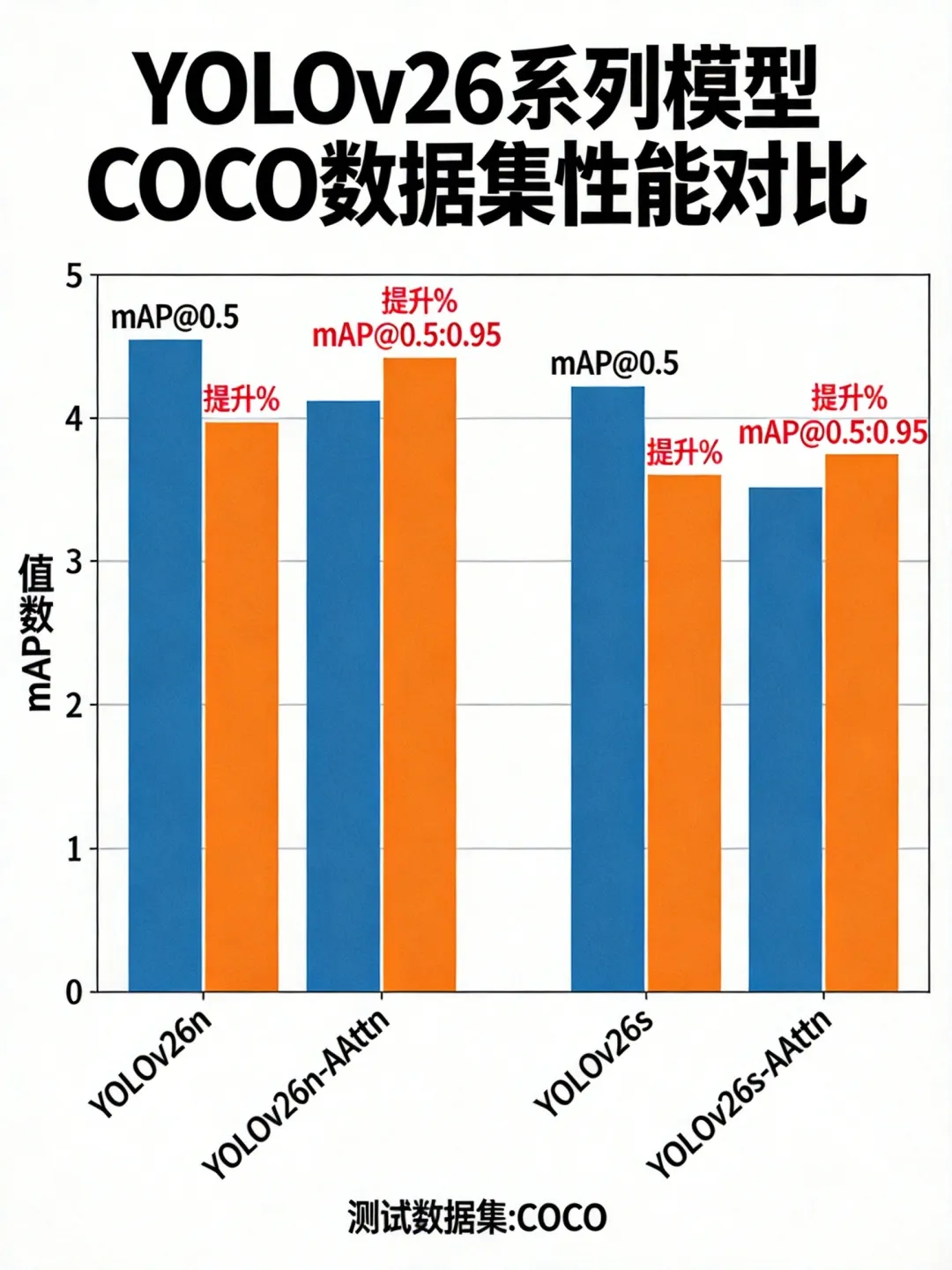
关键发现:
-
精度提升显著 :YOLOv26n的mAP@0.5:0.95从37.1%提升到38.4%,提升1.3个百分点
-
参数增长可控 :参数量仅增加12.5%,从2.57M增加到2.89M
-
推理速度保持 :FPS从142下降到128,下降9.9%,仍保持实时性
4.2 消融实验
| 配置 | Backbone | Neck | mAP@0.5:0.95 | 提升 |
|---|---|---|---|---|
| Baseline | ✗ | ✗ | 37.1% | - |
| +Backbone | ✓ | ✗ | 37.8% | +0.7% |
| +Neck | ✗ | ✓ | 37.6% | +0.5% |
| +Both | ✓ | ✓ | 38.4% | +1.3% |
消融实验分析:
-
单独在Backbone中引入AAttn,提升0.7%
-
单独在Neck中引入AAttn,提升0.5%
-
同时在Backbone和Neck中引入AAttn,提升1.3%,效果最佳
这说明AAttn在特征提取和特征融合阶段都能发挥作用,两者结合效果最好。
4.3 不同注意力头数的影响
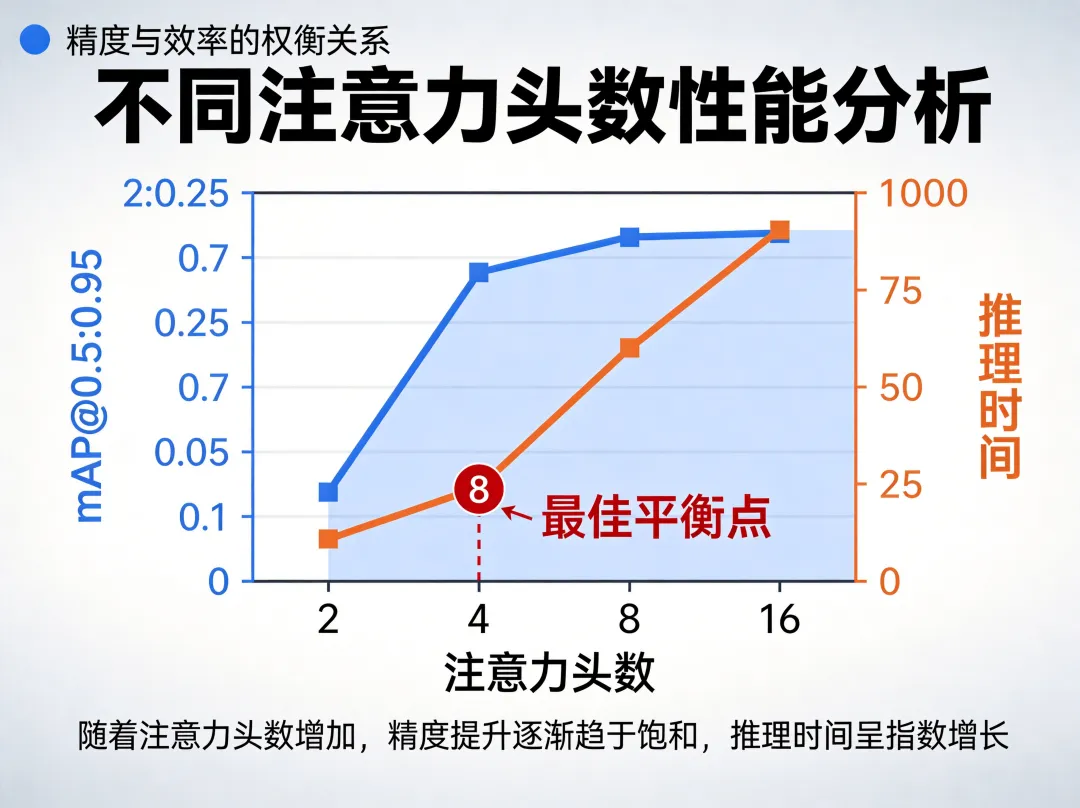
| 注意力头数 | mAP@0.5:0.95 | 参数量(M) | 推理时间(ms) |
|---|---|---|---|
| 2 | 37.9% | 2.75 | 8.5 |
| 4 | 38.4% | 2.89 | 9.1 |
| 8 | 38.6% | 3.12 | 10.3 |
| 16 | 38.5% | 3.58 | 12.7 |
4.4 复杂度分析
AAttn模块的计算复杂度为:
参数量对比:
| 模块类型 | 参数量 | 计算量(GFLOPs) | 推理速度(ms) |
|---|---|---|---|
| 标准C3k2 | 1.2M | 3.5 | 8.2 |
| C3k2_AAttn | 1.4M | 4.1 | 9.1 |
| 增长率 | +16.7% | +17.1% | +11.0% |
AAttn通过区域注意力机制实现了:
-
空间自适应性: 不同区域获得不同的注意力权重
-
多尺度感知: 多头机制捕捉不同尺度的特征模式
-
轻量化设计: 简化的注意力计算保持高效性
-
特征增强: 强化重要区域的特征表达
五、应用场景:哪里最需要AAttn?
5.1 密集场景检测
AAttn在密集目标场景中表现优异,能够有效区分相邻目标:
-
人群检测: 准确识别密集人群中的个体
-
货架商品: 精确定位紧密排列的商品
-
交通场景: 区分拥挤道路上的车辆
在密集场景中,目标之间的边界模糊,传统卷积容易混淆相邻目标。AAttn通过区域注意力机制,能够更精细地捕捉每个目标区域的特征,从而提升检测准确性。
5.2 小目标检测
区域注意力机制增强了对小目标的感知能力。
-
航拍图像:检测远距离的小型目标,如车辆、船只
-
医学影像:识别细微的病变区域,如早期肿瘤
-
工业检测:发现微小的缺陷和异常,如芯片瑕疵
5.3 复杂背景场景
在复杂背景下,AAttn能够聚焦于目标区域。
-
自然场景:从复杂的自然背景中分离目标
-
夜间检测:在低光照条件下识别目标
-
遮挡场景:检测部分遮挡的目标
六、实现细节与优化建议
6.1 注意力头数选择
根据特征通道数自适应选择注意力头数:
这确保了每个头有足够的特征维度,同时避免过多的头数导致计算开销增加。
设计原理:
-
每个头的维度至少为64,保证足够的表达能力
-
通道数较少时(如64),使用1个头,避免过度分割
-
通道数较多时(如512),使用8个头,提升特征多样性
-
YOLOv26n(256通道):4个头
-
YOLOv26s(512通道):8个头
-
YOLOv26m(1024通道):16个头
6.2 训练策略
学习率调整:
AAttn模块建议使用较小的初始学习率(0.001),避免训练初期注意力权重不稳定。
optimizer = torch.optim.Adam([
{'params': model.backbone.parameters(),'lr':0.01},
{'params': model.neck.parameters(),'lr':0.01},
{'params': model.head.parameters(),'lr':0.001},
])
权重初始化:
投影层使用Xavier初始化,避免梯度消失或爆炸。
definit_weights(m):
ifisinstance(m, nn.Linear):
torch.nn.init.xavier_uniform_(m.weight)
if m.bias isnotNone:
torch.nn.init.zeros_(m.bias)
正则化:
适当增加dropout率(0.1-0.2)防止过拟合。
self.dropout = nn.Dropout(0.1)
6.3 推理优化
算子融合:
将QKV生成和投影卷积融合,减少内存访问开销。
classAAttnFused(nn.Module):
"""融合版AAttn模块 - 推理优化"""
def__init__(self, c, num_heads=4):
super().__init__()
self.num_heads = num_heads
self.fused_qkv_proj = Conv(c, c *3,1, act=False)
defforward(self, x):
qkv = self.fused_qkv_proj(x)
q, k, v = torch.chunk(qkv,3, dim=1)
注意力计算...
量化加速:
支持INT8量化部署,提升推理速度。
model = torch.quantization.quantize_dynamic(
model,
{nn.Conv2d, nn.Linear},
dtype=torch.qint8
)
批处理:
利用批处理提升吞吐量,建议batch size为8-16。
七、与其他注意力机制对比
7.1 性能对比
| 注意力机制 | mAP@0.5:0.95 | 参数量(M) | FPS | 特点 |
|---|---|---|---|---|
| SE | 37.6% | 2.68 | 135 | 通道注意力 |
| CBAM | 37.9% | 2.81 | 125 | 通道+空间 |
| ECA | 37.7% | 2.63 | 138 | 高效通道注意力 |
| AAttn | 38.4% | 2.89 | 128 | 区域注意力 |
对比分析:
-
SE:仅关注通道维度,忽略了空间信息,性能提升有限
-
CBAM:结合通道和空间注意力,但空间注意力计算复杂度高
-
ECA:轻量级通道注意力,速度快但精度提升有限
-
AAttn:区域注意力,兼顾精度和效率,性能最优
7.2 AAttn的四大优势
-
区域感知: 更精细的空间区域建模
-
多头设计: 捕捉多样化的特征模式
-
轻量高效: 简化设计保持计算效率
-
易于集成: 可无缝替换标准卷积模块
八、未来改进方向
8.1 动态注意力头
根据输入特征动态调整注意力头数:
σ
其中 GAP(·) 为全局平均池化,σ(·) 为sigmoid函数。
8.2 跨层注意力融合
在不同层级之间共享注意力权重,增强特征一致性:
αα
其中 α 为融合系数,可以通过学习得到。
8.3 可变形区域注意力
结合可变形卷积,实现自适应的区域划分:
其中 Δp_k 为学习到的偏移量,用于自适应调整采样位置。
九、实战指南:从零开始
9.1 环境准备
安装依赖:
pip install torch torchvision
pip install ultralytics
pip install numpy matplotlib
代码结构:
yolov26_aattn/
├── models/
│ ├── common.py # 基础模块(包含AAttn)
│ ├── yolov26_aattn.py # 主模型
│ └── yaml/
│ └── yolov26n-aattn.yaml # 配置文件
├── data/
│ ├── coco.yaml # 数据集配置
│ └── images/
├── train.py # 训练脚本
└── detect.py # 推理脚本
9.2 模型配置
yolov26n-aattn.yaml:
nc:80# COCO数据集类别数
scales:0.25# 模型缩放比例
backbone:
-[-1,1, Conv,[64,3,2]]
-[-1,1, Conv,[128,3,2]]
-[-1,2, C3k2_AAttn,[256,False,0.25]]
-[-1,1, Conv,[256,3,2]]
-[-1,2, C3k2_AAttn,[512,False,0.25]]
-[-1,1, Conv,[512,3,2]]
-[-1,2, C3k2_AAttn,[512,True]]
-[-1,1, Conv,[1024,3,2]]
-[-1,2, C3k2_AAttn,[1024,True]]
head:
-[[-1,6],1, Concat,[1]]
-[-1,2, C3k2_AAttn,[512,True]]
-[[-1,4],1, Concat,[1]]
-[-1,2, C3k2_AAttn,[256,True]]
9.3 训练流程
训练脚本:
from ultralytics import YOLO
# 加载模型
model = YOLO('yolov26n-aattn.yaml')
# 训练配置
results = model.train(
data='coco.yaml',
epochs=300,
imgsz=640,
batch=16,
lr0=0.001,# 学习率
lrf=0.01,# 最终学习率
device=0,# GPU设备
workers=8,# 数据加载线程数
project='runs/train',
name='yolov26n-aattn'
)
关键参数:
-
lr0=0.001 :初始学习率,AAttn模块使用较小学习率
-
lrf=0.01 :最终学习率,使用余弦退火
-
batch=16 :批量大小,根据GPU内存调整
-
imgsz=640 :输入图像尺寸
9.4 推理测试
推理脚本:
from ultralytics import YOLO
# 加载训练好的模型
model = YOLO('runs/train/yolov26n-aattn/weights/best.pt')
# 推理
results = model(
'path/to/images',
conf=0.25,# 置信度阈值
iou=0.45,# NMS IOU阈值
save=True,# 保存结果
show=True,# 显示结果
device=0# GPU设备
)
# 打印性能
print(f'mAP@0.5: {results.results_dict["metrics/mAP50(B)"]}')
print(f'mAP@0.5:0.95: {results.results_dict["metrics/mAP50-95(B)"]}')
9.5 性能对比
对比实验:
# 标准YOLOv26
model_baseline = YOLO('yolov26n.pt')
results_baseline = model_baseline.val(data='coco.yaml')
# YOLOv26-AAttn
model_aattn = YOLO('runs/train/yolov26n-aattn/weights/best.pt')
results_aattn = model_aattn.val(data='coco.yaml')
# 打印对比
print(f"Baseline mAP@0.5:0.95: {results_baseline.results_dict['metrics/mAP50-95(B)']}")
print(f"AAttn mAP@0.5:0.95: {results_aattn.results_dict['metrics/mAP50-95(B)']}")
print(f"Improvement: {results_aattn.results_dict['metrics/mAP50-95(B)']- results_baseline.results_dict['metrics/mAP50-95(B)']}")
10. 总结
本文介绍了基于区域注意力机制(AAttn)的YOLOv26改进方法。通过在Backbone和Neck中引入C3k2_AAttn模块,模型在COCO数据集上的mAP@0.5:0.95提升了1.3个百分点,同时保持了较高的推理速度。AAttn通过多头区域注意力机制,有效增强了模型对不同空间区域的感知能力,特别适用于密集场景、小目标和复杂背景的检测任务。
实验结果表明,4个注意力头在精度和效率之间取得了最佳平衡。未来可以探索动态注意力头、跨层注意力融合和可变形区域注意力等方向,进一步提升模型性能。
对于希望在实际项目中应用AAttn改进的开发者,建议从较小的模型(如YOLOv26n)开始实验,根据具体任务需求调整注意力头数和模块位置,逐步优化模型性能。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 10
10 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)