永磁同步电机PMSM全速域无速度传感器控制探秘
永磁同步电机PMSM全速域无速度传感器,(高频注入加参考模型法,滑模观测)。 低速域阶段采用高频注入,高速度采用模型法的观测方式。 提供参考资料
在永磁同步电机(PMSM)的控制领域,实现全速域无速度传感器运行一直是研究的热点和难点。今天咱们就来深入探讨一下结合高频注入、参考模型法以及滑模观测这几种技术,达成PMSM全速域无速度传感器控制的奇妙之旅。
一、整体思路概述
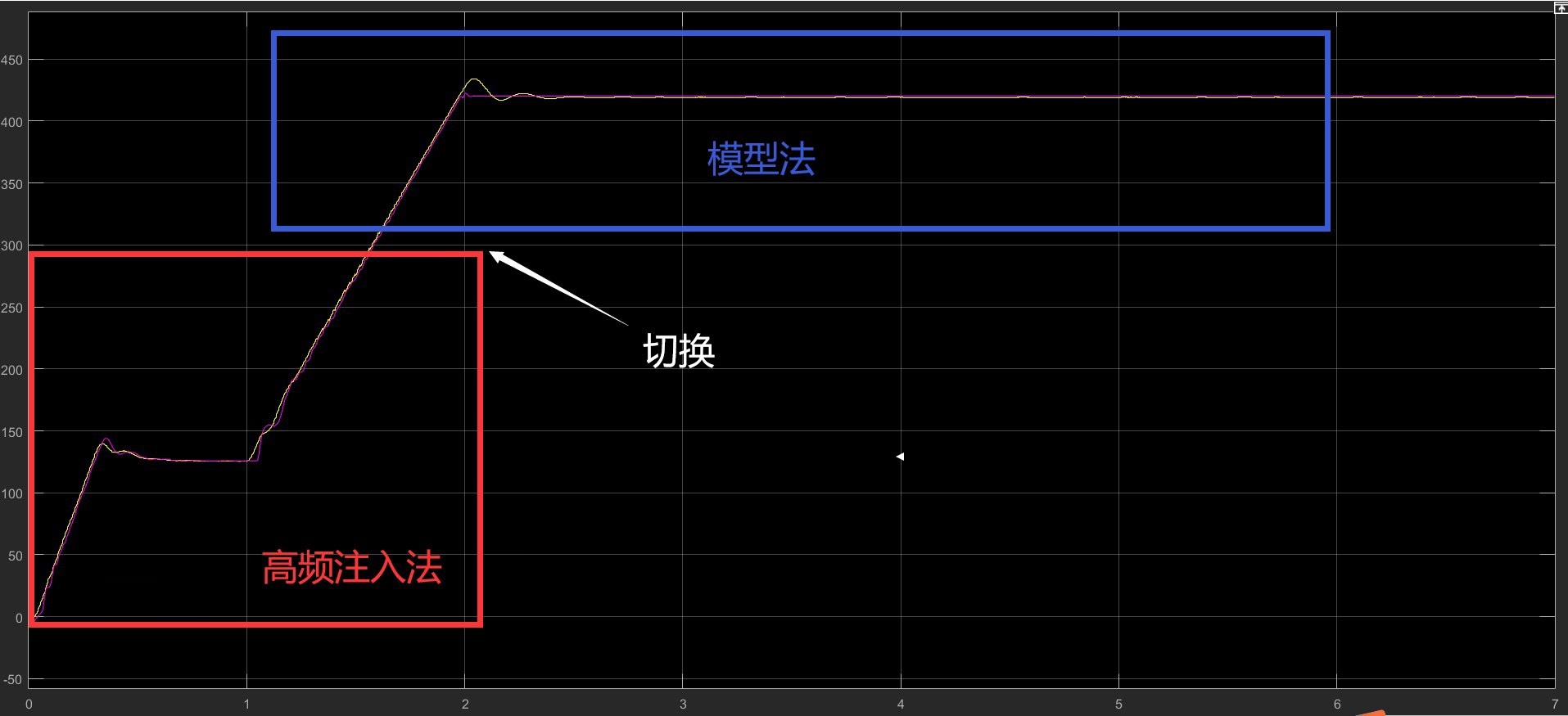
为了在全速域内实现良好的无速度传感器控制效果,我们采用了一种分段策略:在低速域阶段运用高频注入法,而在高速度阶段则采用模型法的观测方式。这种组合策略充分利用了不同方法在不同速度区间的优势,以实现整体性能的优化。
二、低速域 - 高频注入法
原理简介
在低速时,电机反电动势较小,传统基于反电动势的观测方法精度大幅下降。高频注入法应运而生,它通过向电机注入高频信号,利用电机的凸极效应来获取转子位置和速度信息。简单来说,就是在电机的定子绕组中注入高频电压信号,由于电机的凸极特性,高频电流响应会携带转子位置的信息。我们通过对高频电流信号的处理,就能解算出转子位置和速度。
代码示例(以简化的MATLAB代码为例)
% 高频注入法相关参数设置
f_hf = 1000; % 高频注入信号频率
A_hf = 1; % 高频注入信号幅值
w_hf = 2*pi*f_hf; % 高频注入信号角频率
% 模拟电机模型参数
Rs = 1; % 定子电阻
Ld = 0.1; % d轴电感
Lq = 0.15; % q轴电感
psi_f = 0.1; % 永磁体磁链
% 时间步长和仿真时间
dt = 0.0001;
t = 0:dt:1;
% 初始化变量
theta = zeros(size(t)); % 转子位置
omega = zeros(size(t)); % 转子速度
i_d_hf = zeros(size(t)); % 高频d轴电流
i_q_hf = zeros(size(t)); % 高频q轴电流
for k = 2:length(t)
% 注入高频电压信号
v_d_hf = A_hf*cos(w_hf*t(k));
v_q_hf = A_hf*sin(w_hf*t(k));
% 根据电机模型计算高频电流响应
i_d_hf(k) = (v_d_hf - Rs*i_d_hf(k - 1) + w_hf*Lq*i_q_hf(k - 1)) / (Rs + 1j*w_hf*Ld);
i_q_hf(k) = (v_q_hf - Rs*i_q_hf(k - 1) - w_hf*Ld*i_d_hf(k - 1)) / (Rs + 1j*w_hf*Lq);
% 这里省略复杂的从高频电流解算转子位置和速度的步骤,实际会用到信号处理算法
% 简单示意通过某种算法更新转子位置和速度
theta(k) = theta(k - 1) + omega(k - 1)*dt;
omega(k) = omega(k - 1);
end代码分析
上述代码首先设置了高频注入信号的频率 fhf 和幅值 Ahf 等参数,同时定义了电机的一些基本参数如定子电阻 Rs、d轴电感 Ld 和q轴电感 Lq 等。在循环中,我们模拟了高频电压信号的注入,并根据电机模型计算高频电流响应。虽然这里简化了从高频电流解算转子位置和速度的步骤,但基本展示了高频注入法在代码层面的大致实现流程。实际应用中,会使用更复杂的信号处理算法来精确提取转子位置和速度信息。
三、高速域 - 参考模型法
原理简介
进入高速度区域,电机反电动势较大且相对稳定,参考模型法就发挥了它的优势。这种方法通常基于电机的数学模型,通过构建参考模型和可调模型,利用两者输出的差异来估计转子速度。比如常见的基于磁链观测的参考模型法,通过比较实际测量的定子电流和电压,结合电机模型计算出磁链,再与参考磁链模型对比,通过调整可调模型的参数,使得两者输出误差最小,此时可调模型的输出即为估计的转子速度。
代码示例(同样以简化的MATLAB代码为例)
% 参考模型法相关参数设置
Rs = 1; % 定子电阻
Ld = 0.1; % d轴电感
Lq = 0.15; % q轴电感
psi_f = 0.1; % 永磁体磁链
% 时间步长和仿真时间
dt = 0.0001;
t = 0:dt:1;
% 初始化变量
theta_est = zeros(size(t)); % 估计的转子位置
omega_est = zeros(size(t)); % 估计的转子速度
i_a = zeros(size(t)); % 实际测量的A相电流
i_b = zeros(size(t)); % 实际测量的B相电流
v_a = zeros(size(t)); % 实际测量的A相电压
v_b = zeros(size(t)); % 实际测量的B相电压
% 模拟实际测量的电流和电压信号(这里简单生成模拟信号)
for k = 1:length(t)
i_a(k) = sin(2*pi*50*t(k));
i_b(k) = sin(2*pi*50*t(k) - 2*pi/3);
v_a(k) = 220*sin(2*pi*50*t(k));
v_b(k) = 220*sin(2*pi*50*t(k) - 2*pi/3);
end
for k = 2:length(t)
% 基于电机模型计算估计的磁链
psi_d_est = psi_d_est(k - 1) + dt * (v_a(k) - Rs*i_a(k));
psi_q_est = psi_q_est(k - 1) + dt * (v_b(k) - Rs*i_b(k));
% 通过磁链误差调整估计的转子速度(这里简化处理)
omega_est(k) = omega_est(k - 1) + 0.01*(psi_d_est(k) - psi_d_ref(k));
theta_est(k) = theta_est(k - 1) + omega_est(k)*dt;
end代码分析
这段代码先设定了电机的基本参数。在循环中,我们首先模拟了实际测量的定子电流和电压信号(这里只是简单生成正弦信号模拟实际测量值)。然后基于电机模型计算估计的磁链,通过比较估计磁链与参考磁链的误差(这里简化处理)来调整估计的转子速度。实际应用中,参考模型和可调模型的构建会更加精确和复杂,以适应不同的电机特性和运行工况。
四、滑模观测在其中的作用
滑模观测器可以作为一种鲁棒性很强的观测手段,在整个全速域控制中起到重要作用。它能够对电机的状态进行观测,并且对系统参数变化和外部干扰具有较好的抑制能力。无论是在低频的高频注入阶段还是高速的参考模型法阶段,滑模观测器都可以用来估计电机的电流、磁链等状态变量,从而提高整个无速度传感器控制系统的性能。
永磁同步电机PMSM全速域无速度传感器,(高频注入加参考模型法,滑模观测)。 低速域阶段采用高频注入,高速度采用模型法的观测方式。 提供参考资料
比如在上述参考模型法中,我们可以构建滑模观测器来估计定子电流,使得电流估计更加准确,进而提升速度估计的精度。具体实现时,通过设计合适的滑模面和滑模控制律,使得观测器的输出能够快速跟踪实际值,并且在面对电机参数变化等不确定性因素时保持较好的性能。
五、总结
通过在低速域采用高频注入法,高速域采用参考模型法,并结合滑模观测器提升系统鲁棒性,我们能够较为有效地实现永磁同步电机PMSM的全速域无速度传感器控制。当然,实际工程应用中还需要考虑更多的因素,如电机参数的实时辨识、系统的稳定性和可靠性等。但这种组合控制策略为我们提供了一个很好的基础和思路,希望本文的探讨能为对这一领域感兴趣的朋友们带来一些启发。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 12
12 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)